



 本文介绍了SQLServer 2014版本中新增的TRY_PARSE、TRY_CAST和TRY_CONVERT三个数据转换函数的特点及使用方法,并通过实例对比了这些函数与原有CAST和CONVERT函数的区别。
本文介绍了SQLServer 2014版本中新增的TRY_PARSE、TRY_CAST和TRY_CONVERT三个数据转换函数的特点及使用方法,并通过实例对比了这些函数与原有CAST和CONVERT函数的区别。
SQL Server到了目前的2014版本有三个函数是用来转换数据格式的。虽说之前版本中已经有CAST和CONVERT这两个函数来干这个事情。问题是,一旦往目标数据类型转换失败就会造成报错。
TRY_PARSE、TRY_CAST和TRY_CONVERT的共同特点:
1)即便转换失败也不会造成整个语句报错,只会在无法转换的情况下输出NULL值;
TRY_PARSE:
TRY_PARSE是用于将字符串类型的数据转换成时间或者数值类型的数据。它是一个基于.NET CLR Runtime的标量函数。语法是TRY_PARSE(<string/string column> AS <data_type> [USING <culture>])
下面做一个字符串转时间的实验:
SQL Server 版本:
Microsoft SQL Server 2014
Enterprise Edition (64-bit) on Windows NT 6.3 <X64>
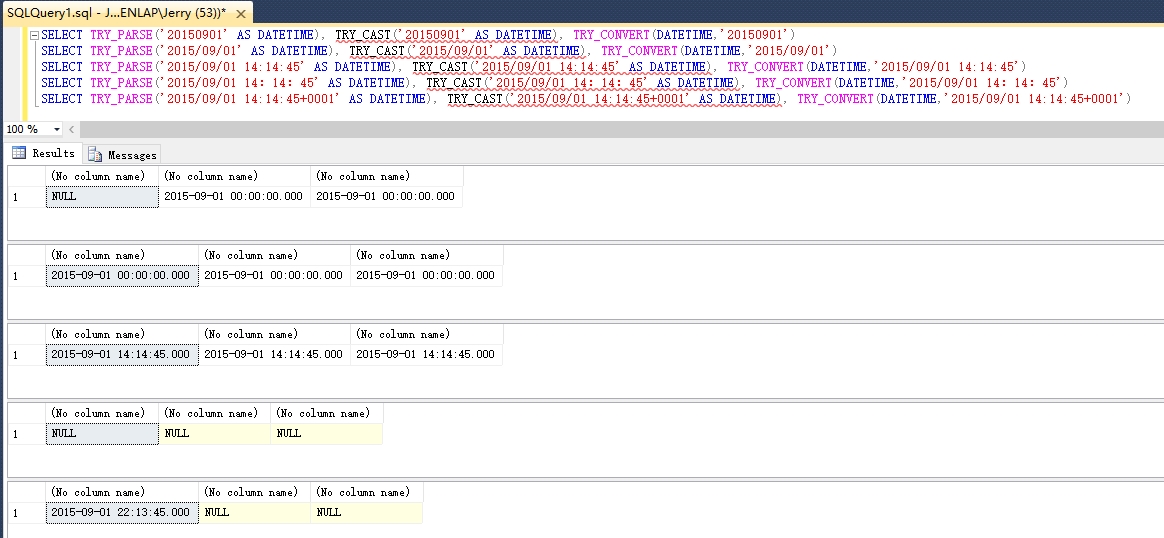
SELECT TRY_PARSE('20150901' AS DATETIME), TRY_CAST('20150901' AS DATETIME), TRY_CONVERT(DATETIME,'20150901') SELECT TRY_PARSE('2015/09/01' AS DATETIME), TRY_CAST('2015/09/01' AS DATETIME), TRY_CONVERT(DATETIME,'2015/09/01') SELECT TRY_PARSE('2015/09/01 14:14:45' AS DATETIME), TRY_CAST('2015/09/01 14:14:45' AS DATETIME), TRY_CONVERT(DATETIME,'2015/09/01 14:14:45') SELECT TRY_PARSE('2015/09/01 14:14:45' AS DATETIME), TRY_CAST('2015/09/01 14:14:45' AS DATETIME), TRY_CONVERT(DATETIME,'2015/09/01 14:14:45') SELECT TRY_PARSE('2015/09/01 14:14:45+0001' AS DATETIME), TRY_CAST('2015/09/01 14:14:45+0001' AS DATETIME), TRY_CONVERT(DATETIME,'2015/09/01 14:14:45+0001')
上面代码输出的结果如下图所示
可以看到TRY_PARSE在将纯数字转为DATETIME的情况下居然失效,这点让我非常意外,而且我尝试了DATE类型也是一样的结果。
而如果加了像"-"或者"/"这样的时间分隔符则三个函数都能转换成功。
还有一点让我惊讶的是TRY_CAST和TRY_CONVERT不支持带有时区的转换,而TRY_PARSE则可以。
而当我把第四行代码的冒号修改成中文下面的冒号时则SQL Server辨认不出来。
TRY_CAST和TRY_CONVERT:
这一对更多是CAST和CONVERT这对函数的变体,语法上一样,只是当无法成功转换的时候是报错或者输出NULL值。
三者的区别总结如下:
1)TRY_PARSE只支持字符转数值或者时间类型,而TRY_CAST和TRY_CONVERT支持更多的类型;
2)三者有一点比较好的就是对于字符的空格处理,只要空格在处在分割符号的前后像“2015/ 09/ 10”这样是可以被成功处理的,但是如果空格隔开本身就是一个整体的数据值部分,则全部不能识别,像“2015/0 9/10”。
2)TRY_PARSE由于是CLR写的函数,对于源数据的数据格式支持比较广或者要求比较宽松,而TRY_CAST和TRY_CONVERT则要求比较严格。这点从上面的例子中,TRY_PARSE支持带有时区的时间格式而其他两个不支持就可以看出。而TRY_PARSE的支持范围远不止于此。
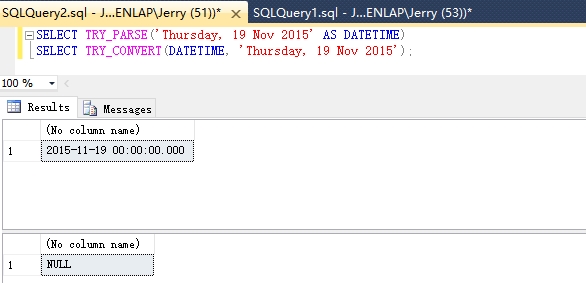
下面这个例子就证明了TRY_PARSE是仅最大的努力和可能去转换数据,而后两者则需要很严格数据格式
SELECT TRY_PARSE('Thursday, 19 Nov 2015' AS DATETIME) SELECT TRY_CONVERT(DATETIME, 'Thursday, 19 Nov 2015');
-------------------------------------- update 2015/12/09 ----------------------------------------------
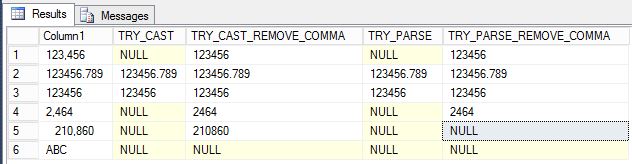
TRY_PARSE和TRY_CAST在把字符转换成数值这一功能上,TRY_PARSE在某种情况下要比TRY_CAST差。这里做个实验。
SELECT Column1, TRY_CAST(Column1 AS FLOAT) AS TRY_CAST, TRY_CAST(REPLACE(Column1,',','') AS FLOAT) AS TRY_CAST_REMOVE_COMMA, TRY_PARSE(Column1 AS FLOAT) AS TRY_PARSE, TRY_PARSE(REPLACE(Column1,',','') AS FLOAT) AS TRY_PARSE_REMOVE_COMMA FROM OPENROWSET('Microsoft.ACE.OLEDB.12.0' ,'Excel 12.0 Xml;HDR=YES;IMEX=1;Database=D:\1.xlsx' ,'SELECT * FROM [sheet1$]');
上面语句的结果
我的源文件内容是这样的:
| Column1 |
| 123,456 |
| 123456.789 |
| 123456 |
| 2,464 |
| 210,860 |
| ABC |
可以看到结果中对于第5行的转换TRY_PARSE没能把数字前后类似于空格的特殊字符忽略。这点上TRY_CAST应该说做得更加好。

















 670
670

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









