



 本文深入探讨了卡尔曼滤波器的工作原理,通过简单易懂的例子解释其预测和校正机制,并推荐了相关资源,包括书籍《最优状态估计》及详细的技术博客,适合自动驾驶等领域的学习者。
本文深入探讨了卡尔曼滤波器的工作原理,通过简单易懂的例子解释其预测和校正机制,并推荐了相关资源,包括书籍《最优状态估计》及详细的技术博客,适合自动驾驶等领域的学习者。
原理介绍
https://pan.baidu.com/s/15zDz8TeM8PKMsH231a0fOw
简单的例子
https://www.jianshu.com/p/d3b1c3d307e0
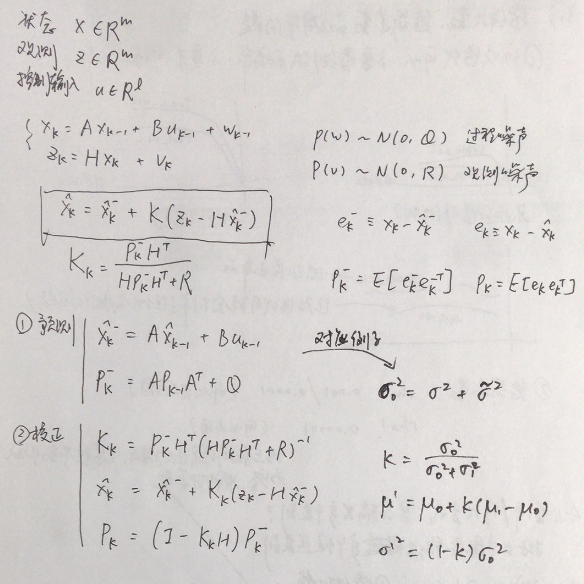
下图中“对应例子”就是所引用简书博客提到的例子。预测-校正交替运行。
博客:自动驾驶基础之——如何写卡尔曼滤波器?
https://mp.weixin.qq.com/s/pedsiTnePumAY4CWZT4XGQ
著作:
最优状态估计:卡尔曼、H∞及非线性滤波:https://book.douban.com/subject/26315799/

















 470
470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









