



 本文详细介绍了在CentOS虚拟机中配置网络、安装Node.js和npm的步骤,包括网络配置、安装过程及验证安装成功的具体操作。
本文详细介绍了在CentOS虚拟机中配置网络、安装Node.js和npm的步骤,包括网络配置、安装过程及验证安装成功的具体操作。
由于是虚拟机下新装的centos系统,所以在配置nodejs环境的时候遇到些麻烦,所以记录一下帮助下遇到同样问题的童鞋
1.配置网络
不配好网络wget什么的就用不鸟了,参考下http://blog.chinaunix.net/uid-28458821-id-3476402.html
输入命令setup,然后照着上面的链接操作一下,再配置下网卡自动激活
输入命令 vi /etc/sysconfig/network-scripts/ifcfg-eth0 关键里面的ONBOOT = yes 表示系统启动时激活该设备

DEVICE= 表示物理设备的名字
ONBOOT= yes表示系统启动时激活该设备,no表示不激活
BOOTPROTO= 取值可以是static(静态配置)、bootp(使用bootp协议)、dhcp(使用dhcp协议)
BROADCAST= 表示广播地址
IPADDR= 表示该网卡的IP地址
PREFIX= 子网掩码
GATEWAY=表示网关
DNS*=表示DNS
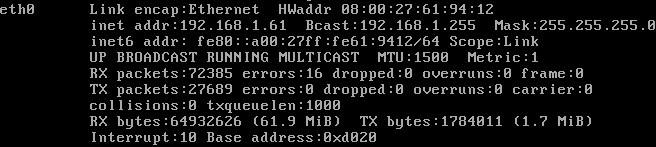
然后 reboot看下,通过ifconfig 或者 ping等看下网卡是否正常工作
2.安装nodejs
wget http:
//nodejs.org/dist/v0.6.10/node-v0.6.10.tar.gz
tar zxvf node-v0.6.10.tar.gz
cd node-v0.6.10
./configure --prefix=/usr/local/node
make && make install
ln -sf /usr/local/node/bin /usr/bin/
如果报错了可能是没C++环境,输入脚本:sudo yum install gcc-c++
安装成功了输入node -v可以看到node版本
3.安装npm
curl http://npmjs.org/install.sh | sudo sh
输入 npm -version测试看npm是否安装成功

















 1548
1548

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









