






 本文介绍了一种判断线段是否相交的方法,包括快速排斥试验和跨立试验,并结合并查集算法解决线段间直接或间接相连的问题。
本文介绍了一种判断线段是否相交的方法,包括快速排斥试验和跨立试验,并结合并查集算法解决线段间直接或间接相连的问题。
给你一些线段,求出哪些线段是相连的,哪些是不相连的。相连包括间接相连,即这两条线段本身不直接相连,而是通过其它线段的连接而间接相连。
线段相交+并查集
这里主要说如何判断线段相交:快速排斥试验+跨立试验
牢记一点:研究对象一定是两条线段的四个端点
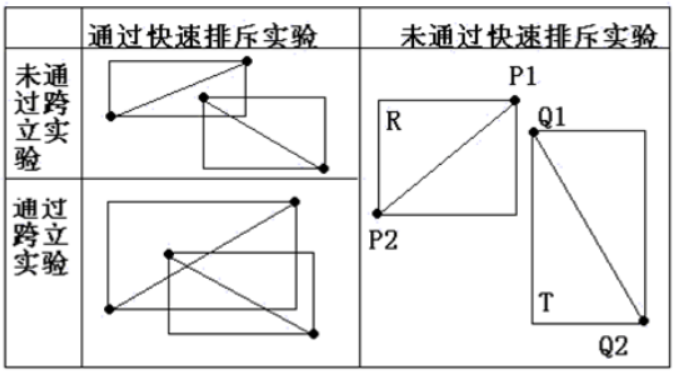
(快速排斥试验:只是可以证明这两条一定不相交,达到一点加速效果)
以线段P1,P2为对角线作一矩形R,再以Q1,Q2为对角线作矩形T,当两个矩形不相交的时候两条线段肯定不相交,即线段相交的必要条件时矩形相交。
矩阵相交依据:两条线段一共四个端点,x/y轴中,最小的两个端点不能属于同一条线段
min(p1.x,p2.x)<=max(q1.x,q2.x)&&
min(q1.x,q2.x)<=max(p1.x,p2.x)&&
min(p1.y,p2.y)<=max(q1.y,q2.y)&&
min(q1.y,q2.y)<=max(p1.y,p2.y)
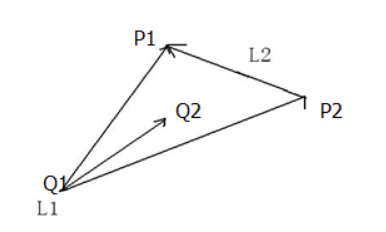
(跨立试验:叉乘+点乘,保证一条线段的两端点在另一条线段的两侧)
(Q1P1xQ1Q2)*(Q1Q2xQ1P2)>0
(P1Q1xP1P2)*(P1Q2xP1P2)>0
叉乘公式:
a x b=(l,m,n)x(o,p,q)=((mq-pn),(no-lq),(lp-mo))
平面的话 a x b=(a.x,a.y,0)x(b.x,b.y,0)=(0,0,a.x*b.y-a.y-b.x)
上代码:
struct point{ int x,y; }; struct seg{ point a,b; }S; int mul(point p1,p2,p3){ return (p1.x-p2.x)*(p3.y-p2.y)-(p1.y-p2.y)*(p3.x-p2.x); } bool insect(point p1,p2,q1,q2){ if(max(p1.x,p2.x)<min(q1.x,q2.x)||max(q1.x,q2.x)<min(p1.x,p2.x)||max((max(p1.y,p2.y)<min(q1.y,q2.y)||max(q1.y,q2.y)<min(p1.y,p2.y))return 0; if(mul(q1,p1,p2)*mul(p2,p1,q2)<=0&&mul(p1,q2,q1)*mul(q1,q2,p2)<=0)return 1; return 0; } int find(int x){ return fa[x]==x?x:fa[x]=find(fa[x]); } void uone(int a,b){ int t1=find(a),t2=find(b); if(t1==t2)return; if(rk[t1]>rk[t2])fa[t2]=t1; else fa[t1]=t2; if(rk[t1]==rk[t2])rk[t2]++; } For(i,2,n) For(j,1,i-1) if(find(i)!=find(j)&&insect(seg[i].a,seg[i].b,seg[j].a,seg[j].b)) uone(i,j);

















 730
730

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









