






 本文探讨了在没有GPS信号的室内环境中,如何利用SLAM(Simultaneous Localization and Mapping)技术为无人机规划安全路径。SLAM技术通过摄像头和标记作为信标,实现亚毫米级精度定位,适用于多车辆协作及紧急响应场景。文章还讨论了无人机动力学原理、电池选择和高效飞行机制。
本文探讨了在没有GPS信号的室内环境中,如何利用SLAM(Simultaneous Localization and Mapping)技术为无人机规划安全路径。SLAM技术通过摄像头和标记作为信标,实现亚毫米级精度定位,适用于多车辆协作及紧急响应场景。文章还讨论了无人机动力学原理、电池选择和高效飞行机制。

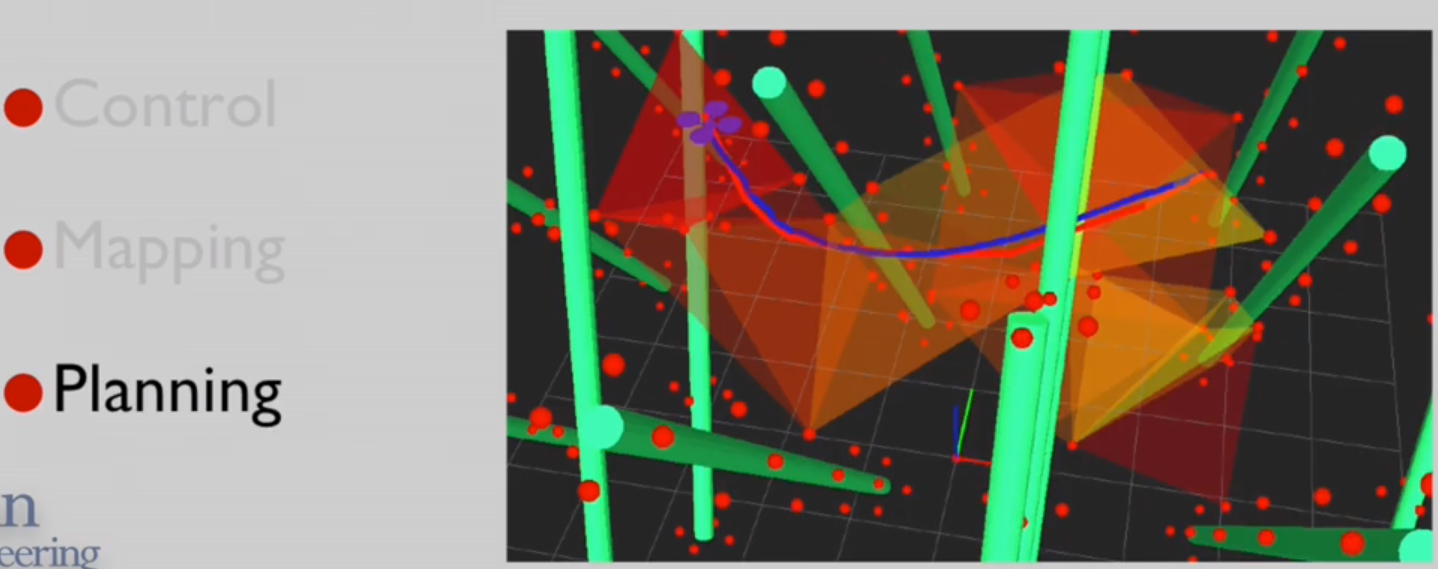
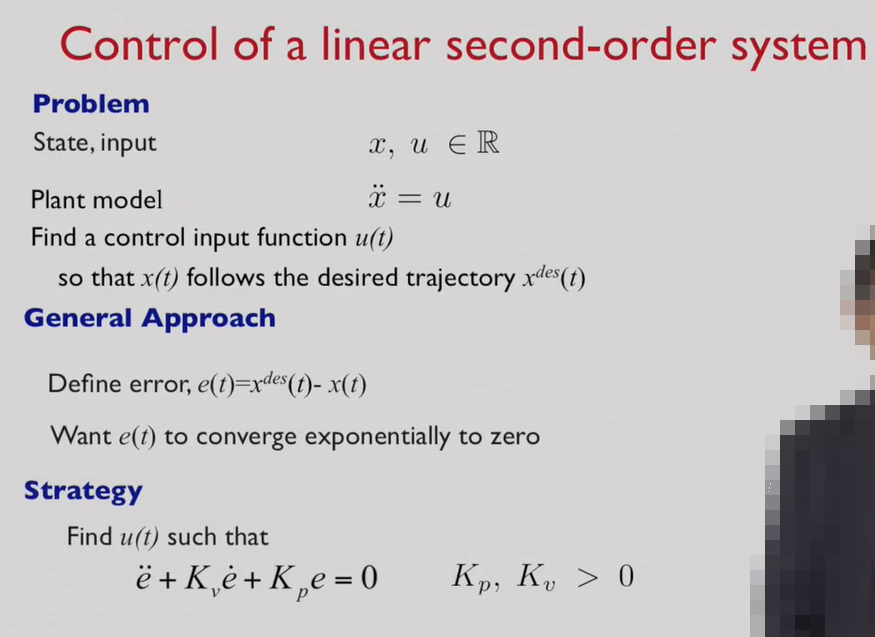
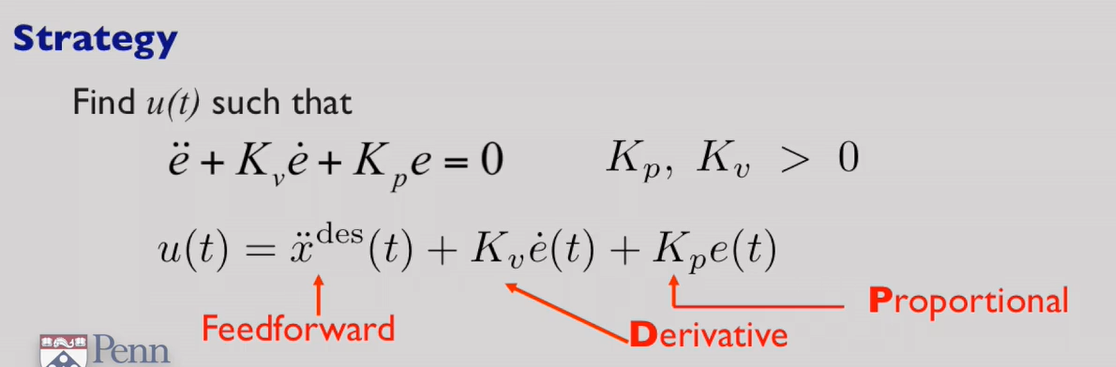
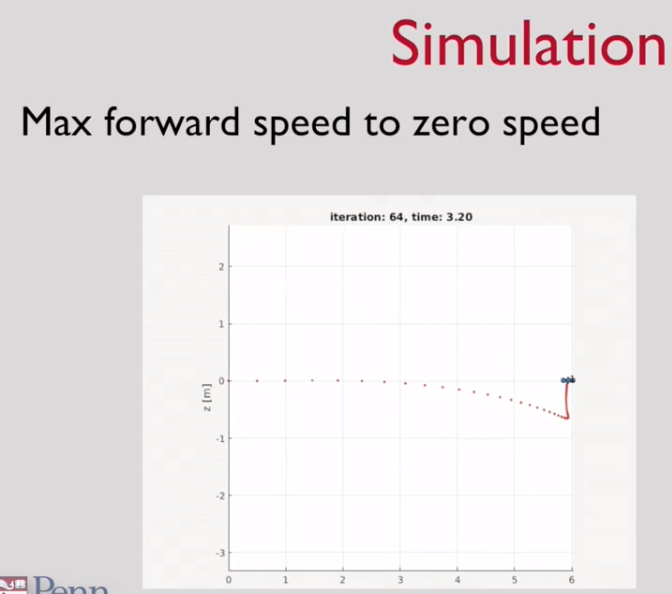
After having starting point, barrirers and destination, how to get a safe trajectory?
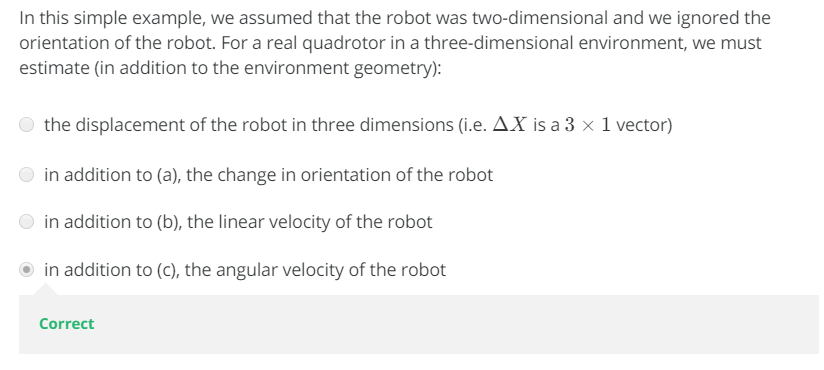
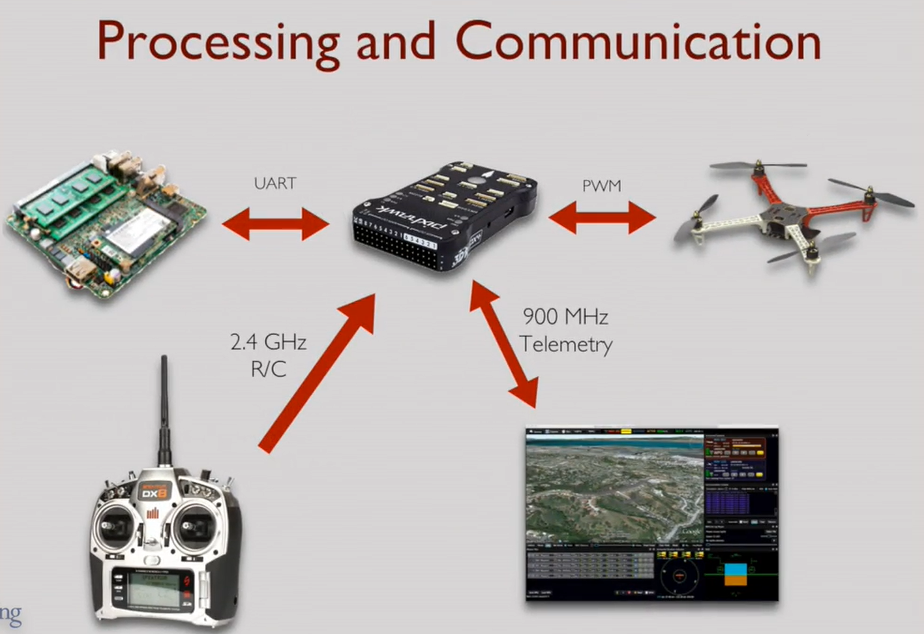
State estimate:
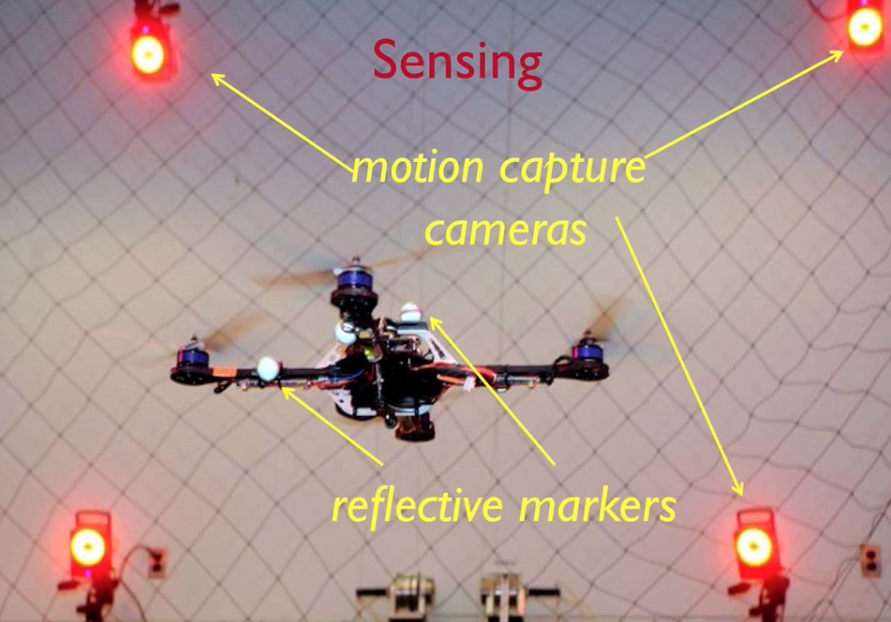
sub milimeter accuracy in lab
GPS for large airplane
But indoors, no GPS.
How???

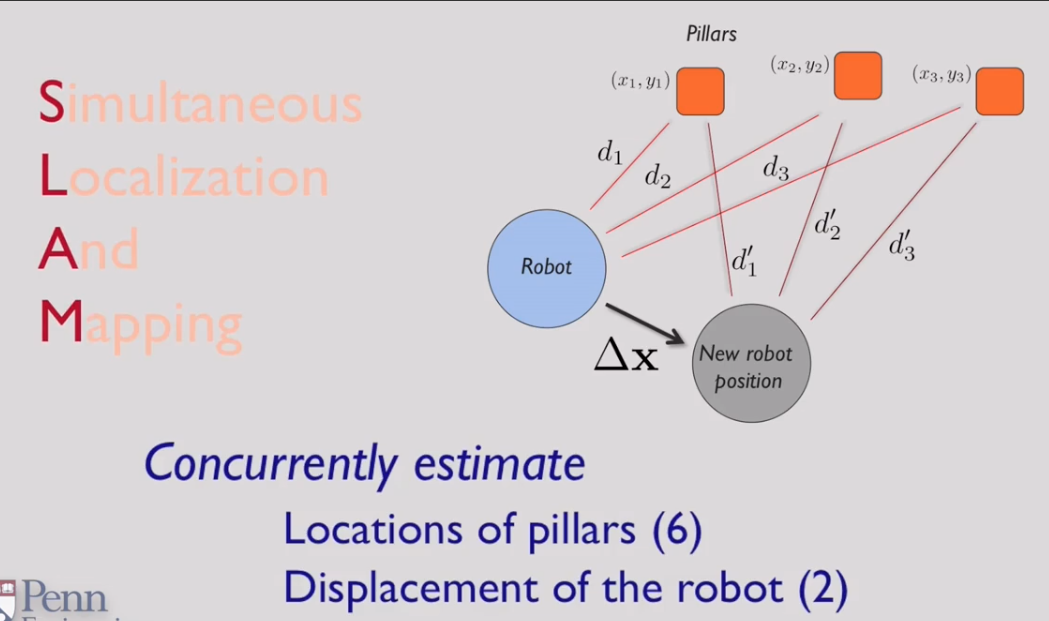
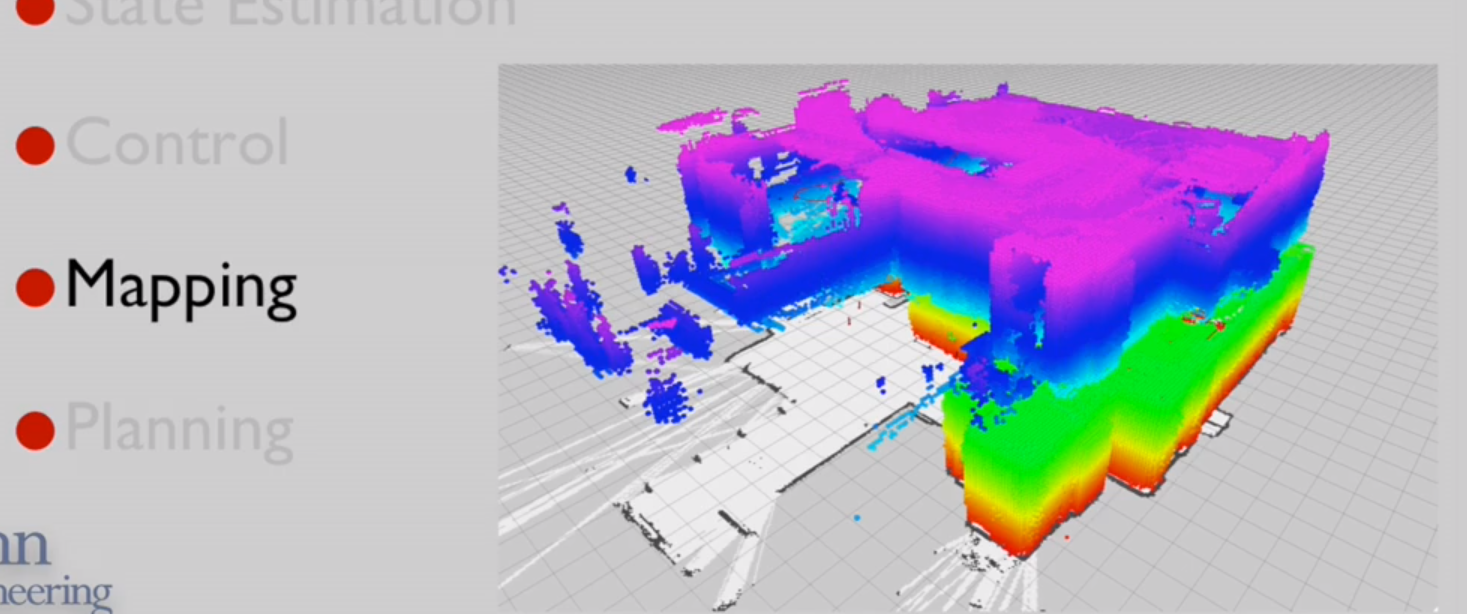
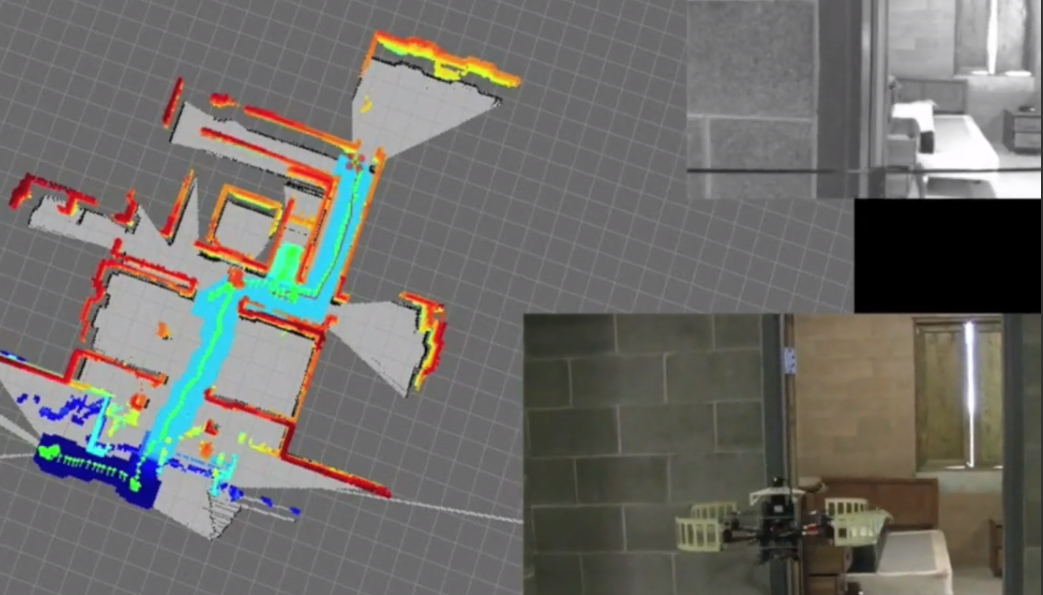
SLAM !!!
 4X
4X
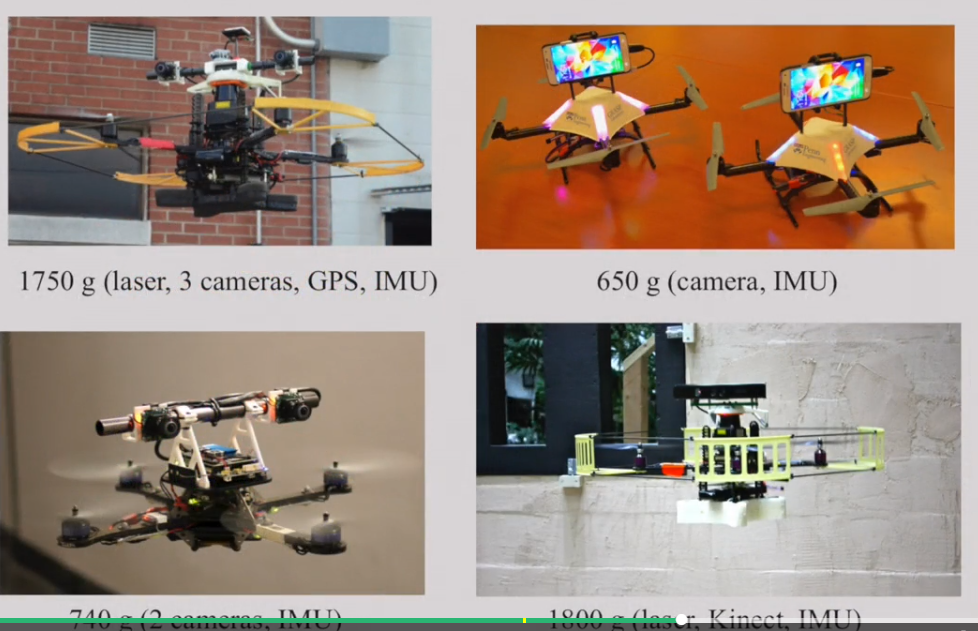
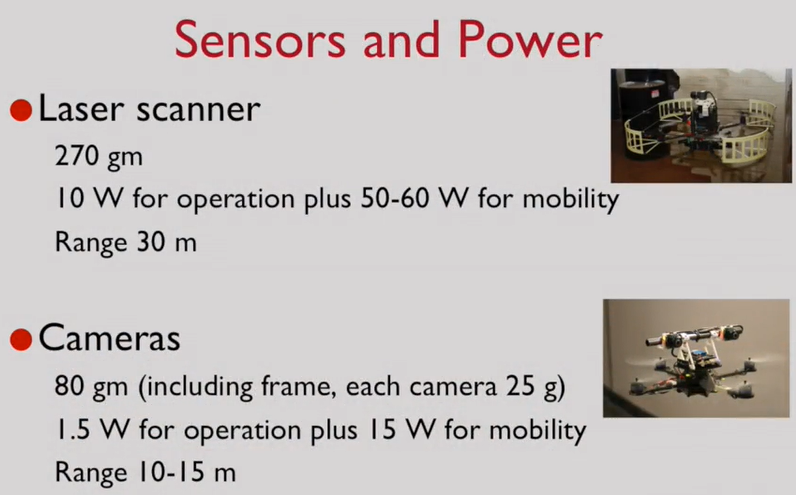
1 camera

markers as beacons
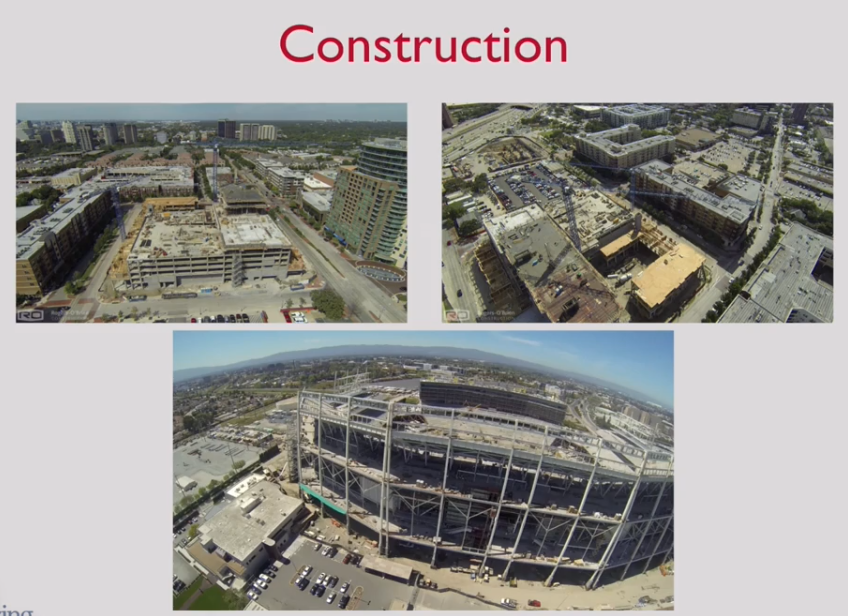
Applications:

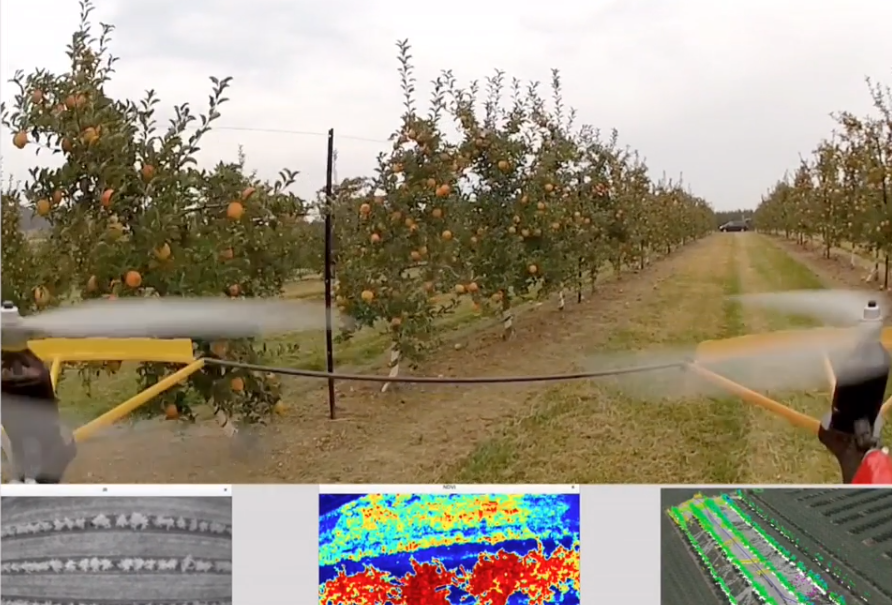
also multiple vehicles collaborating
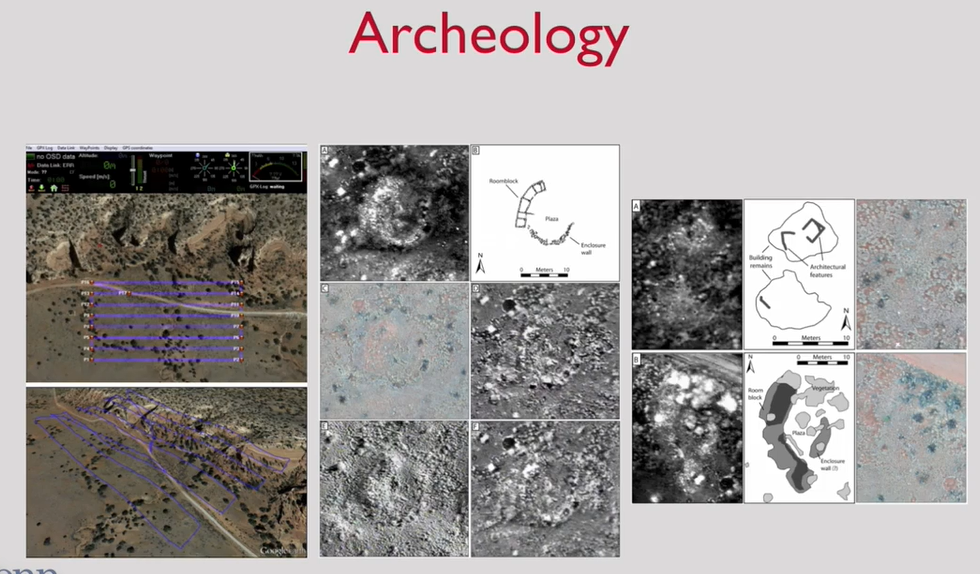


response to 911 call

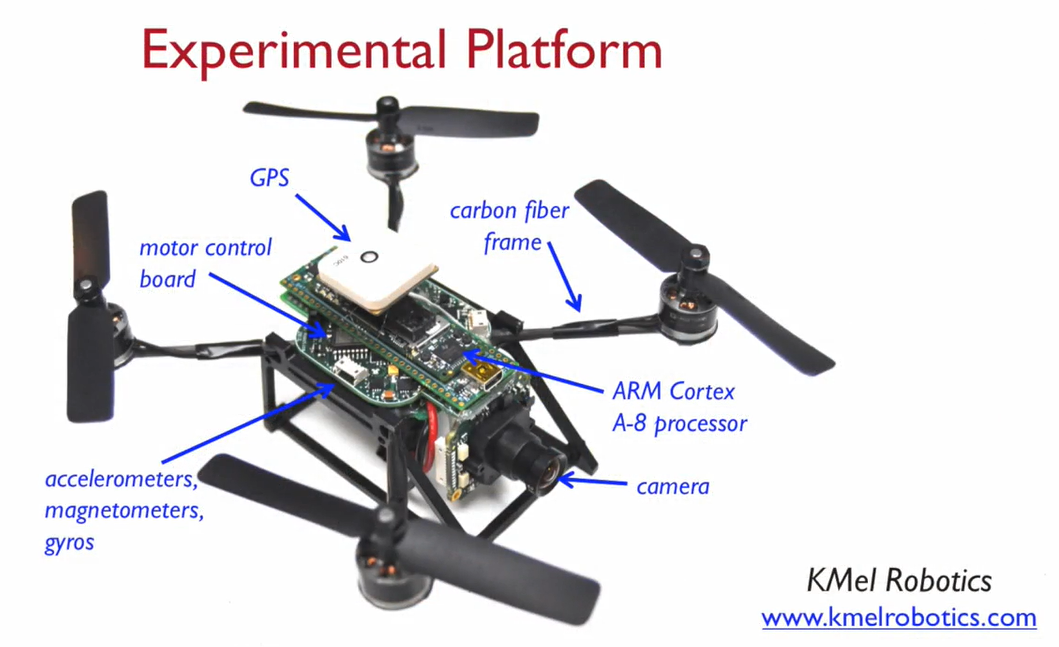
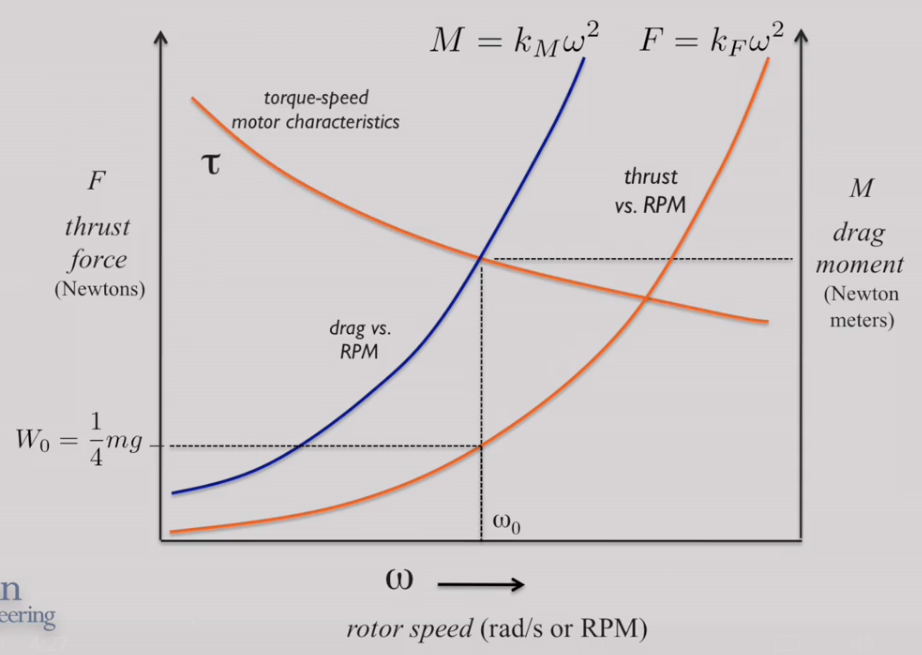
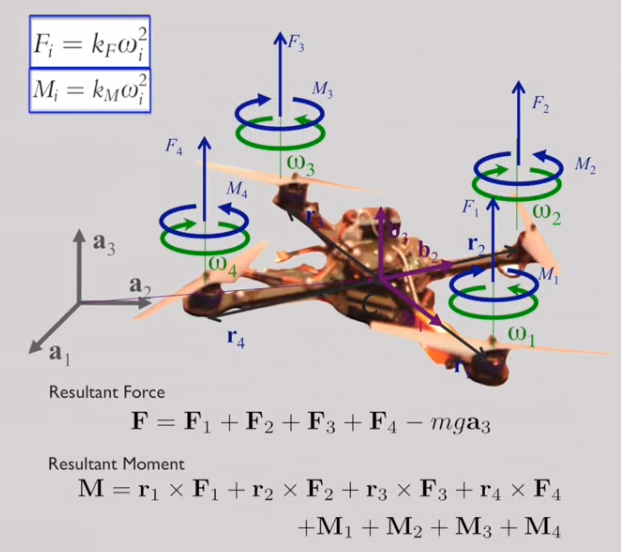
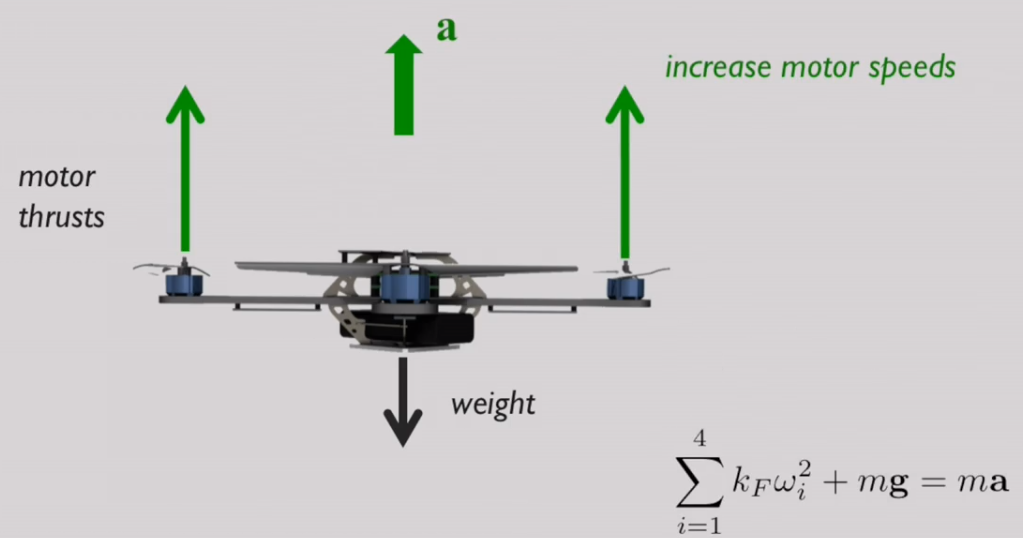
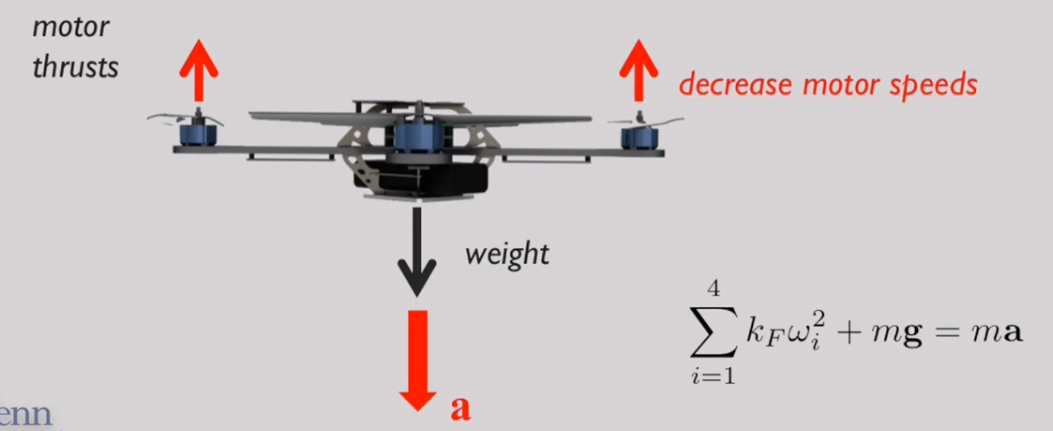
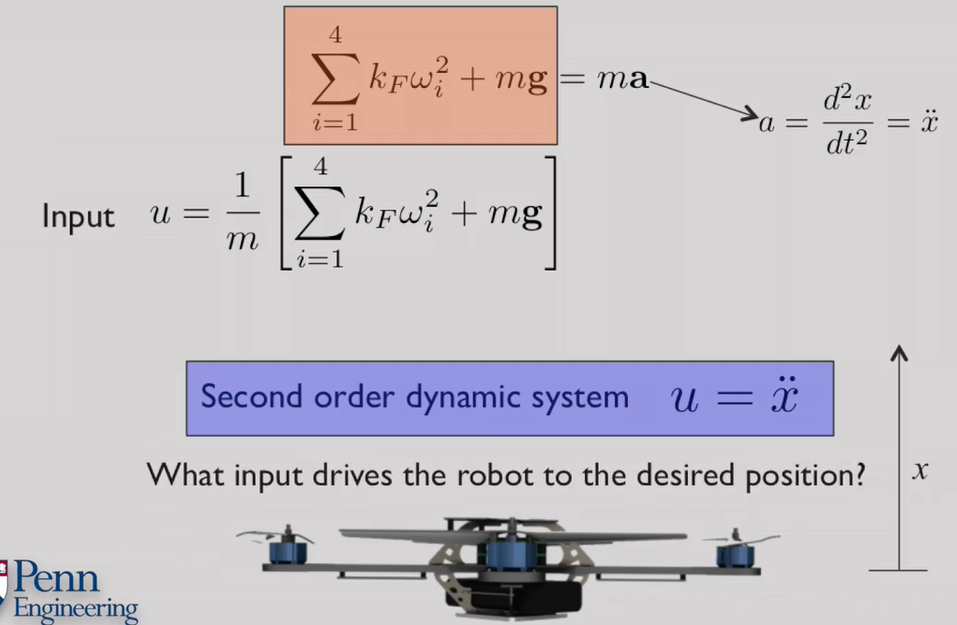
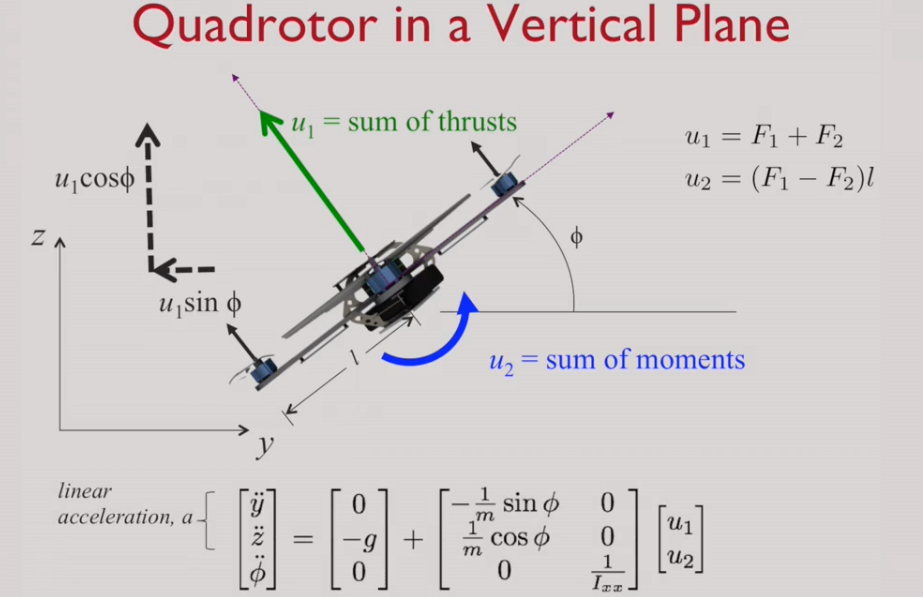
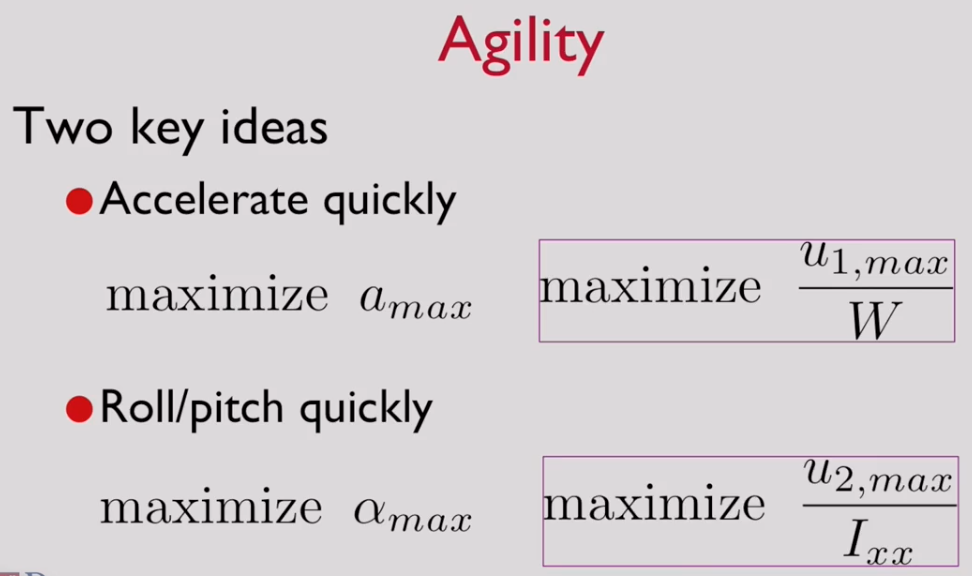
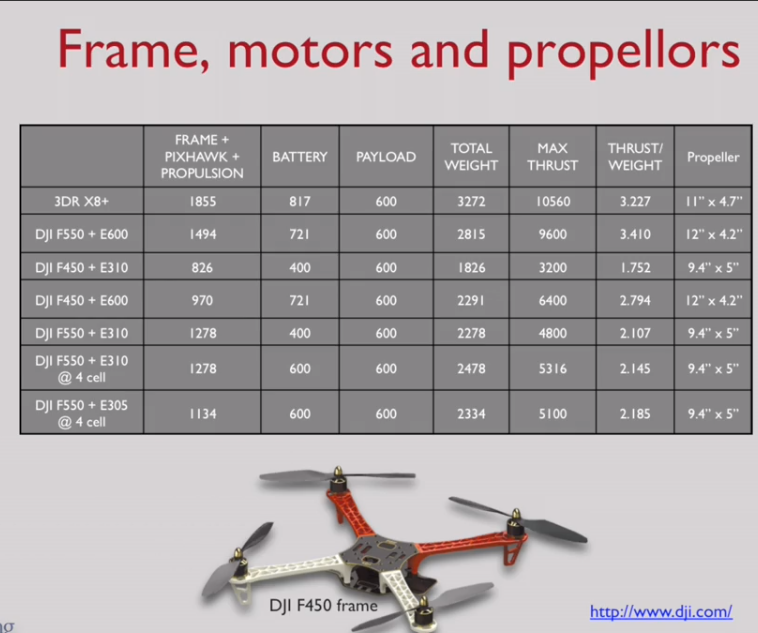
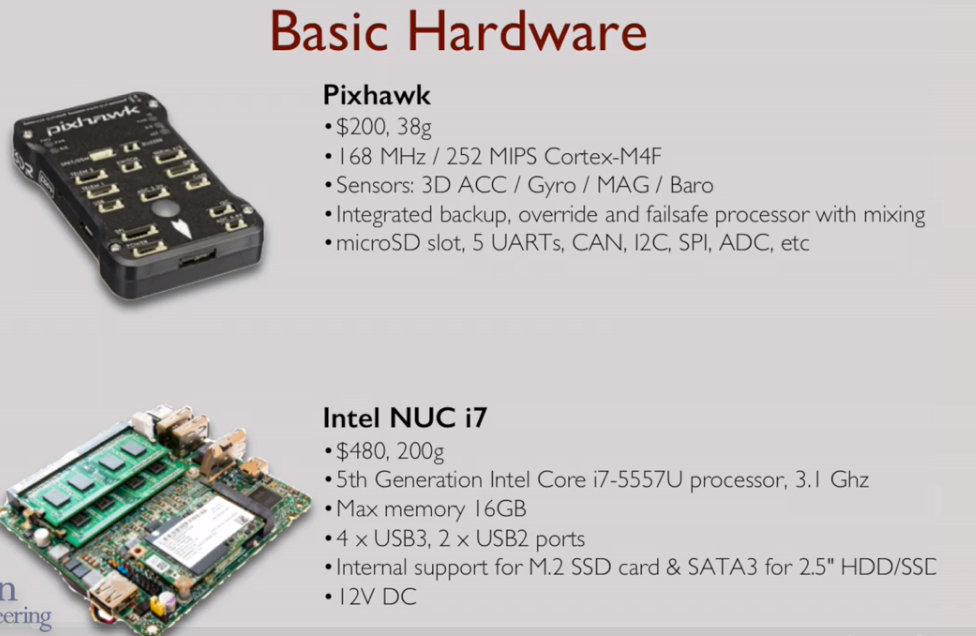
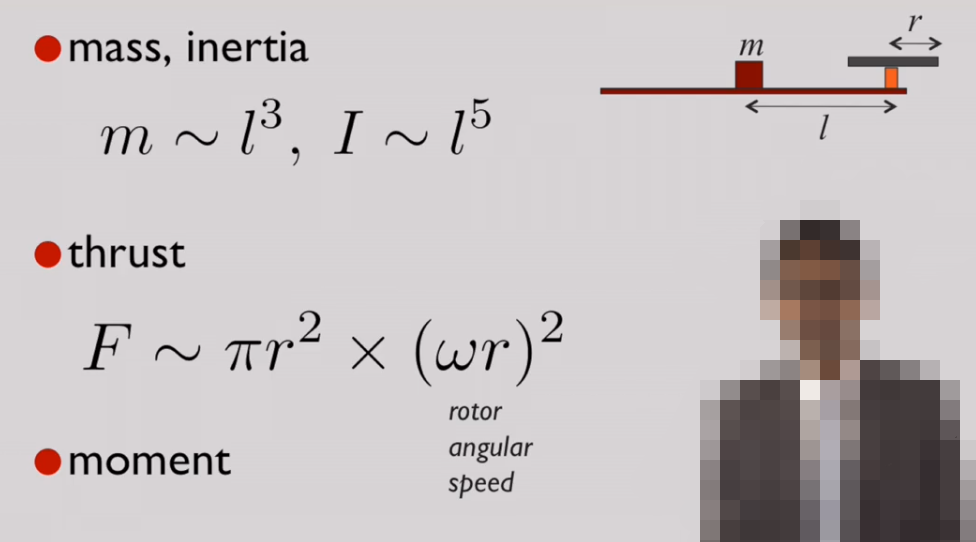
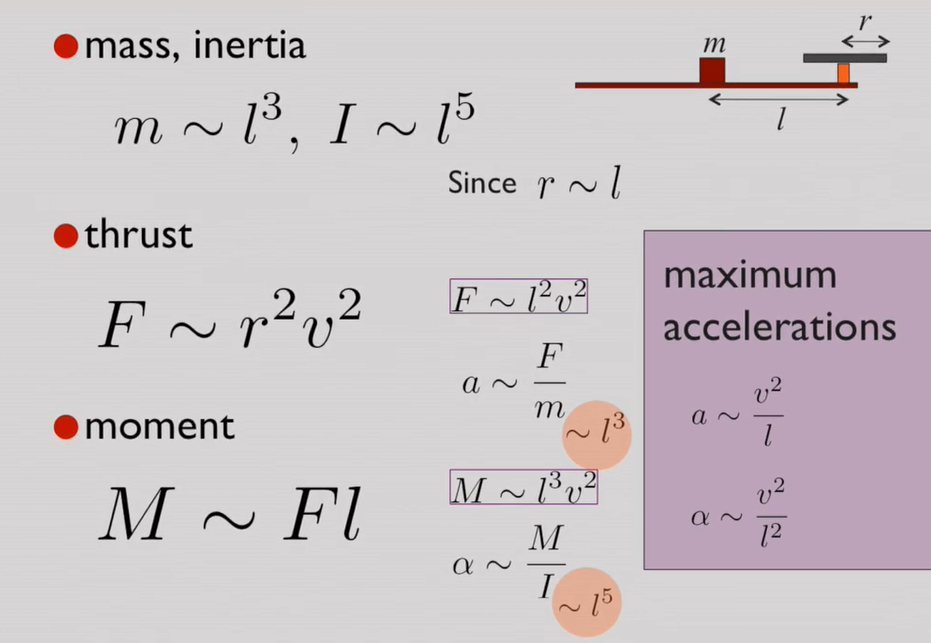
1,Basic Mechanics
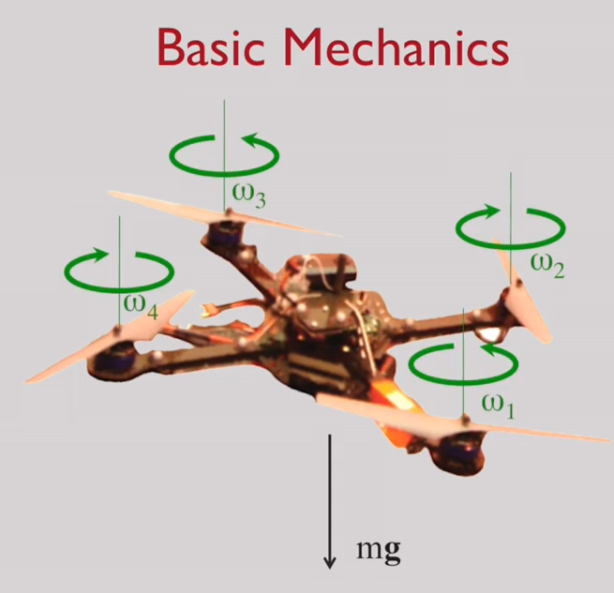
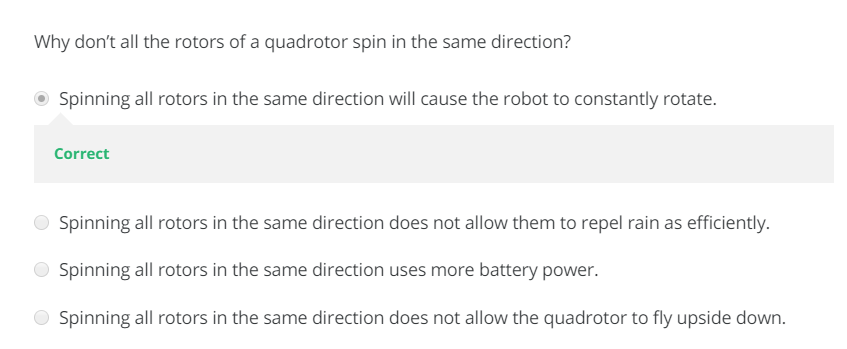
https://www.quora.com/Why-cant-all-the-motors-of-a-quadcopter-rotate-in-the-same-direction

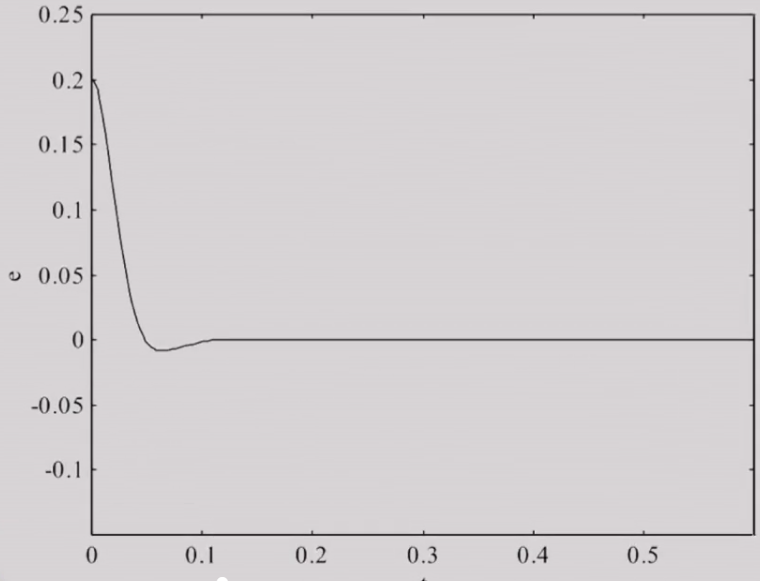

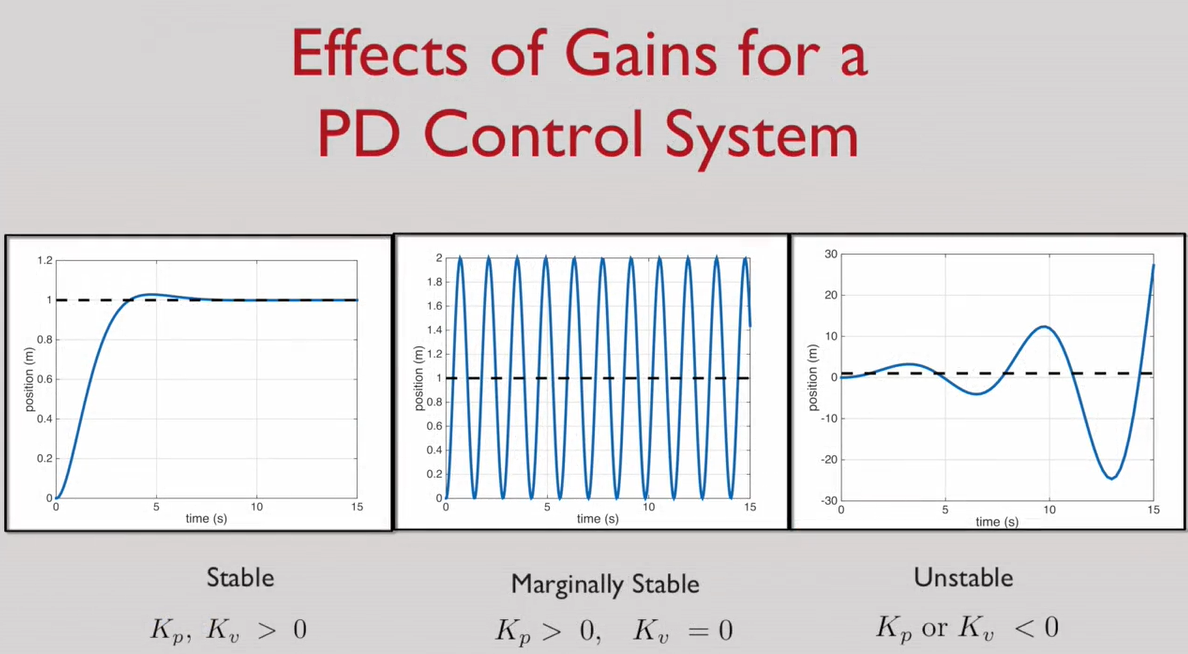
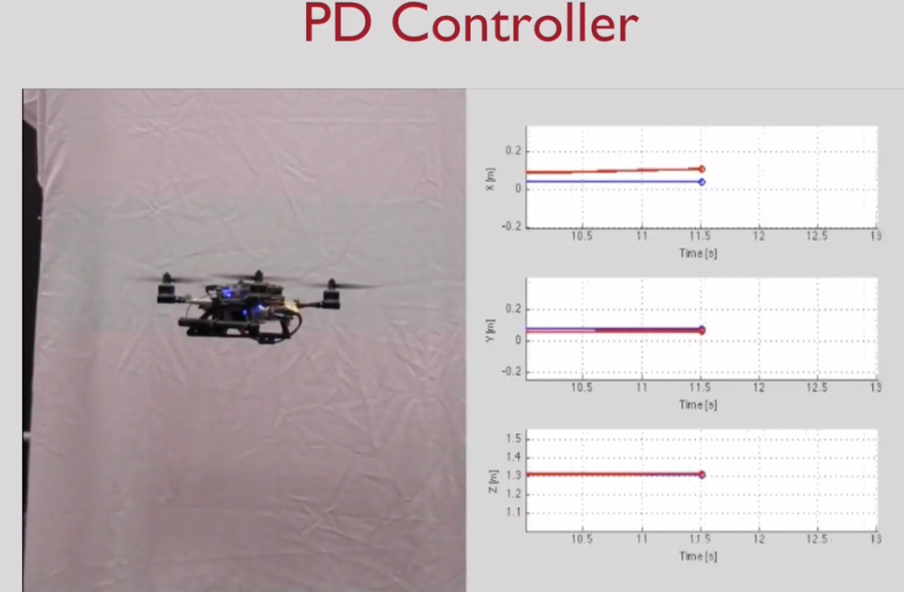
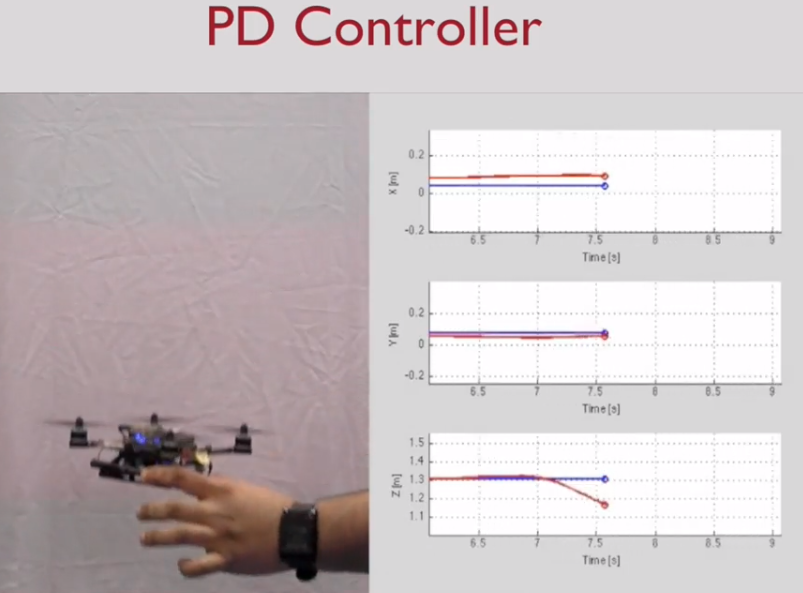 disturbance and recovery
disturbance and recovery
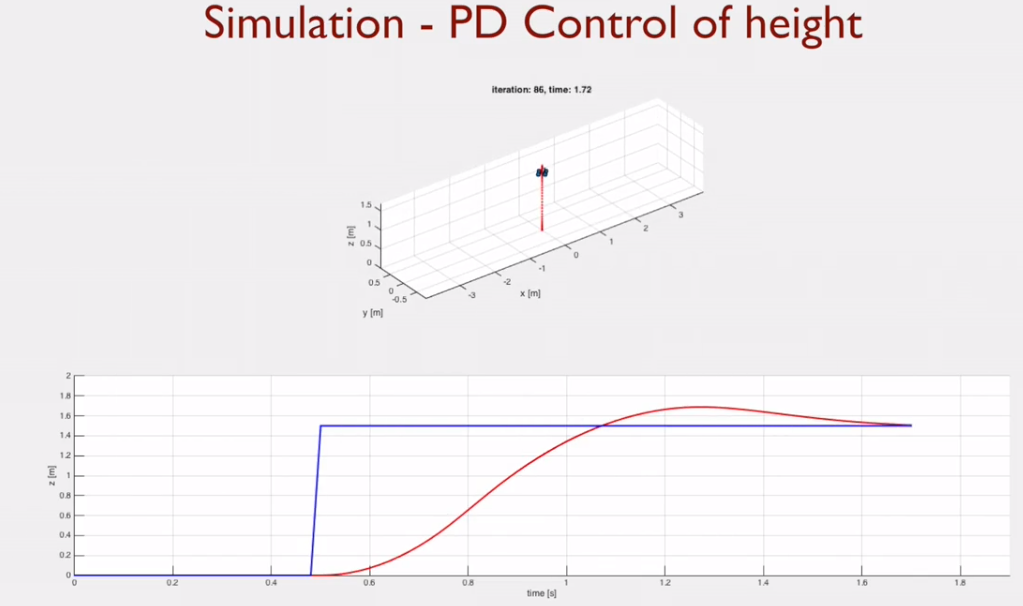
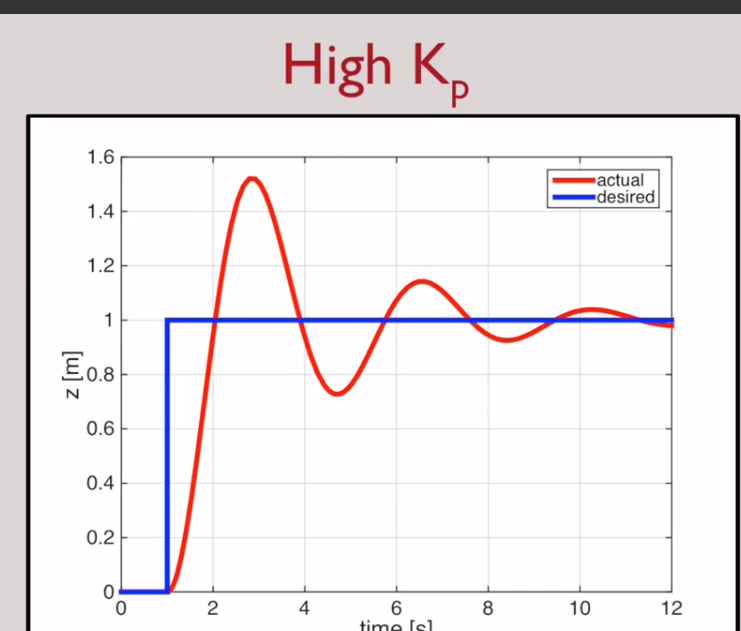 over shoot and recovery
over shoot and recovery
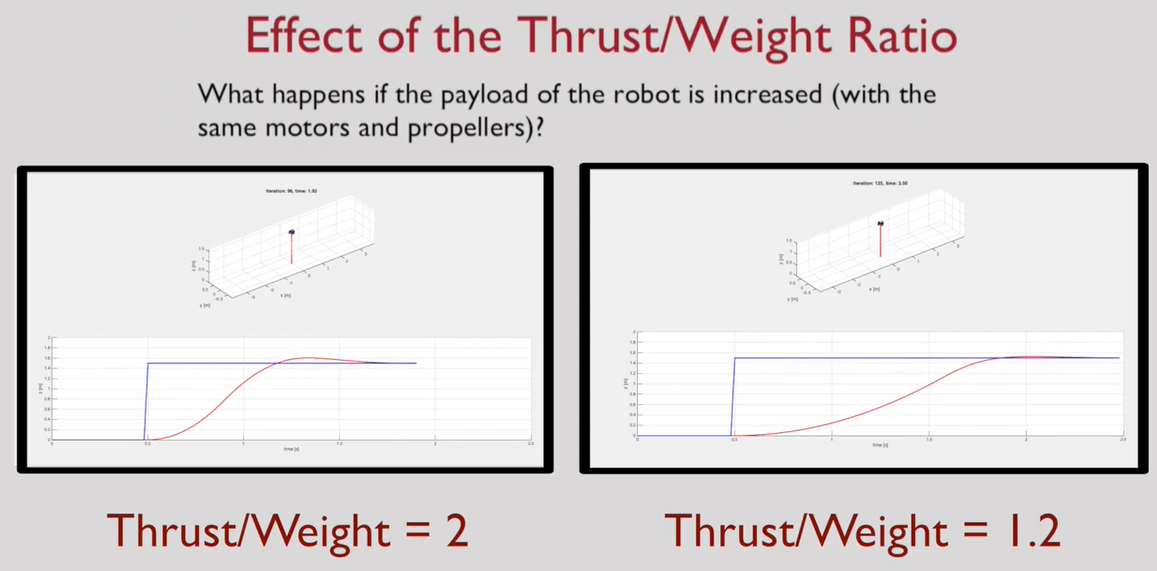
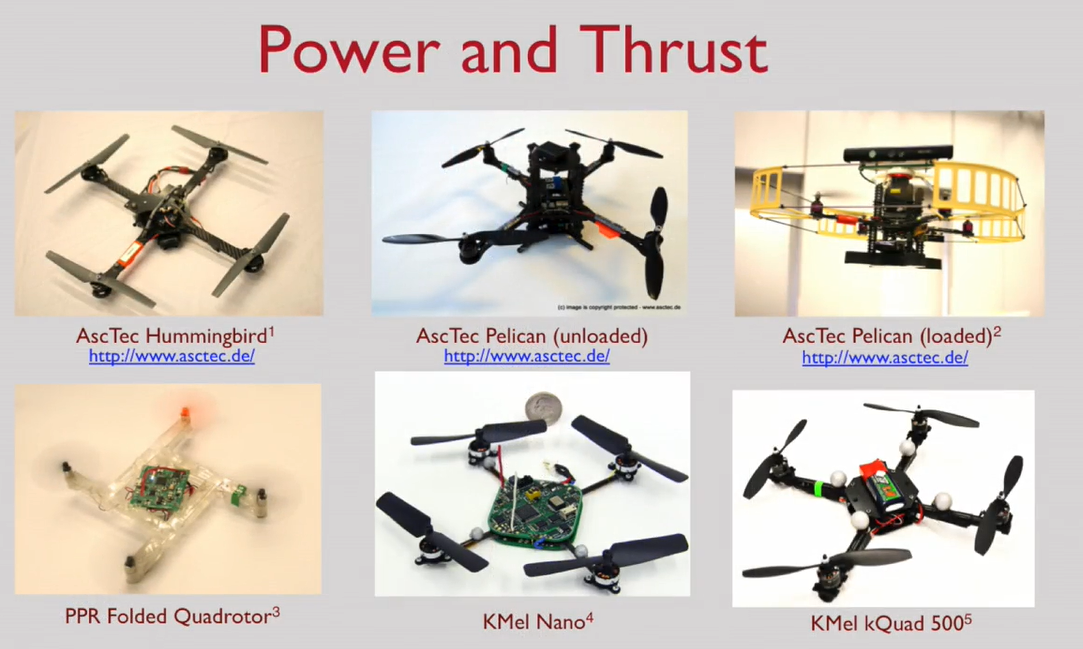

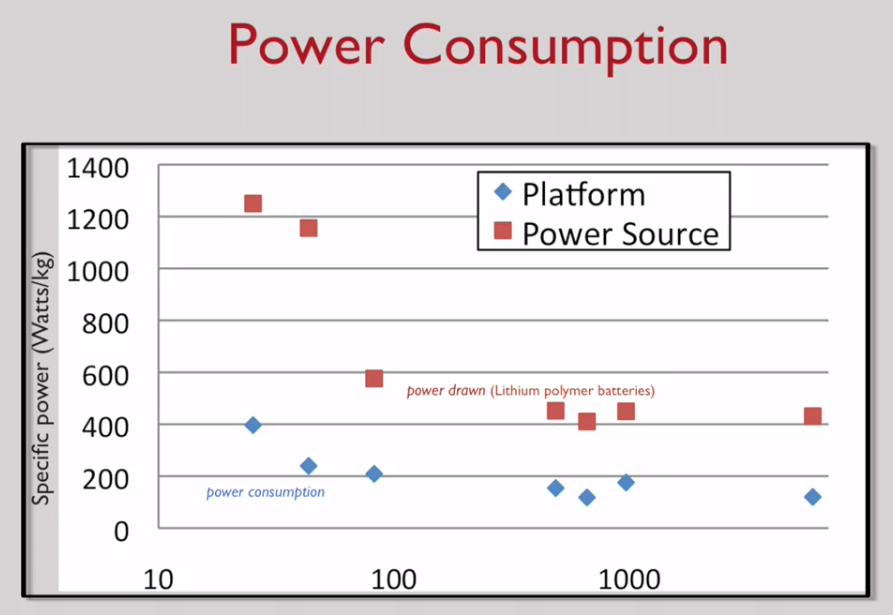
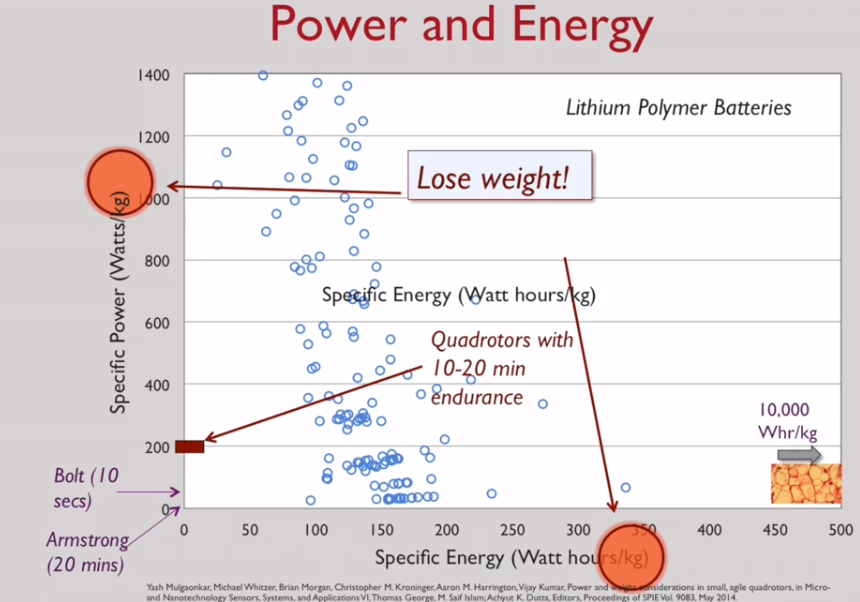
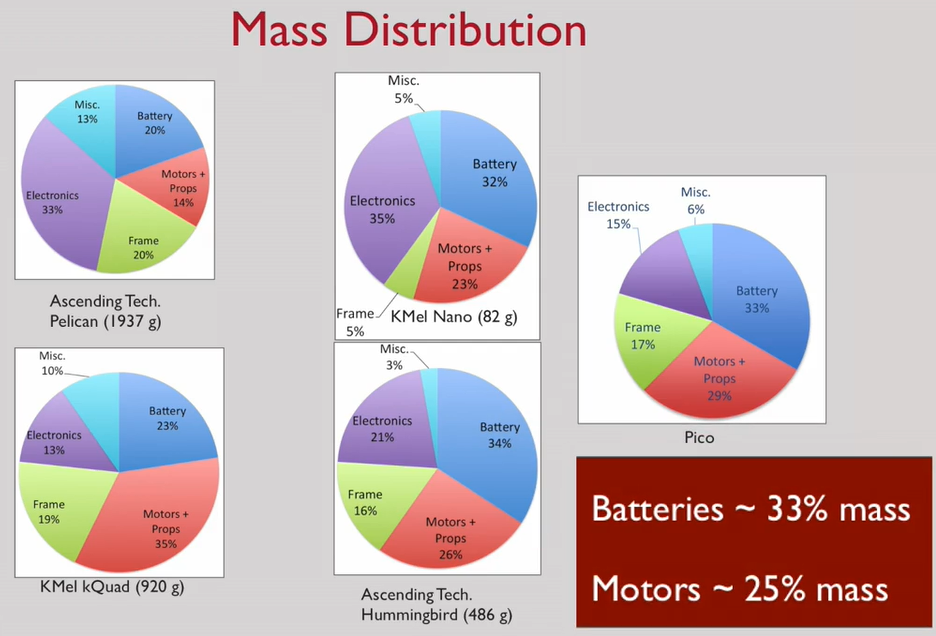
battery selection
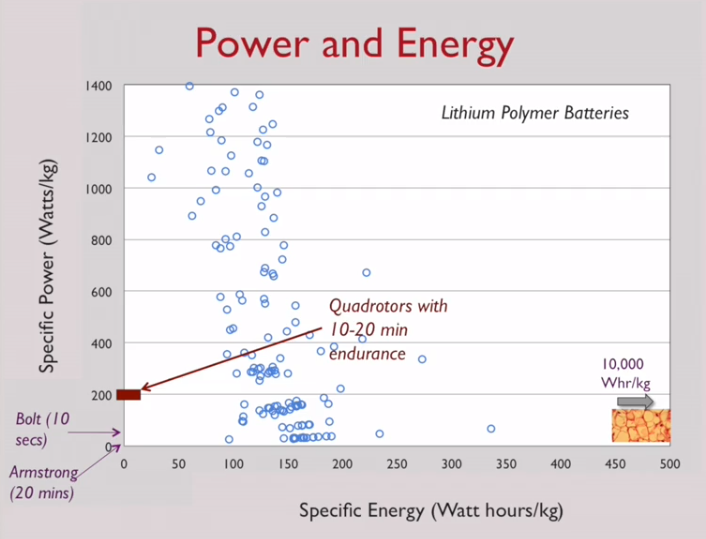
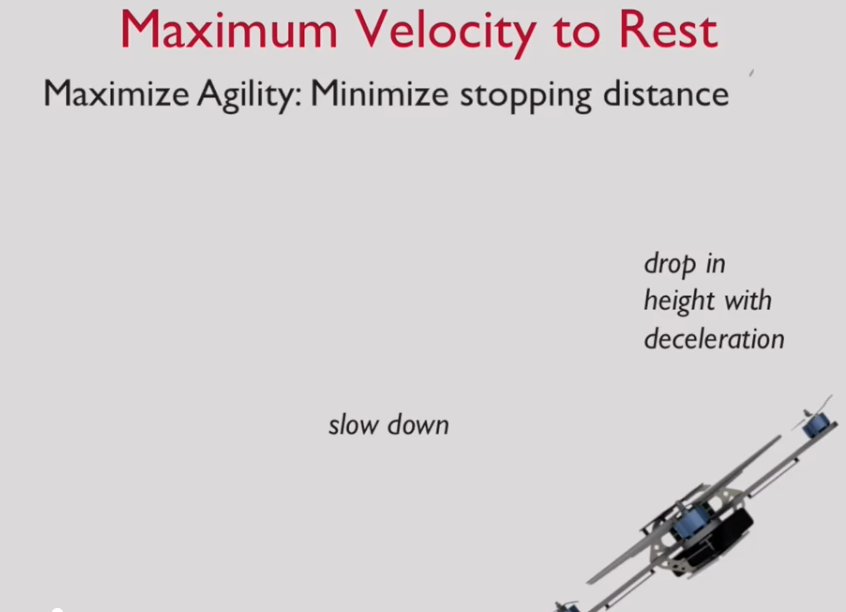
Actually hovering is an inefficient mechanism !!!
Bolt: 20W/kg
bicyclist: 6W/kg
fat of tissue carries 10kw per kg
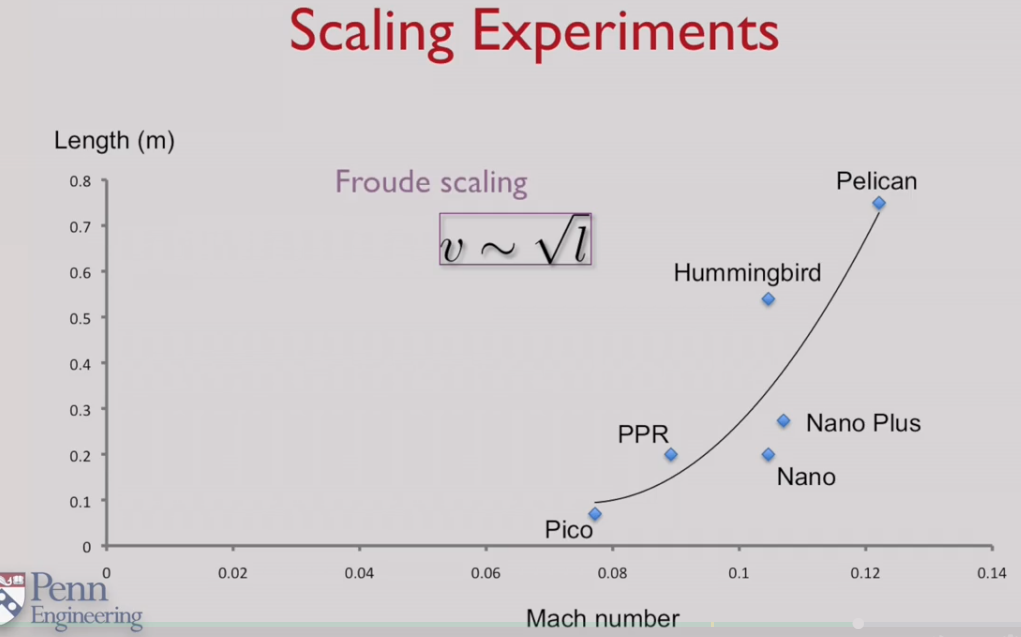
↓ have to build smaller and more light-weight quadrators in lab

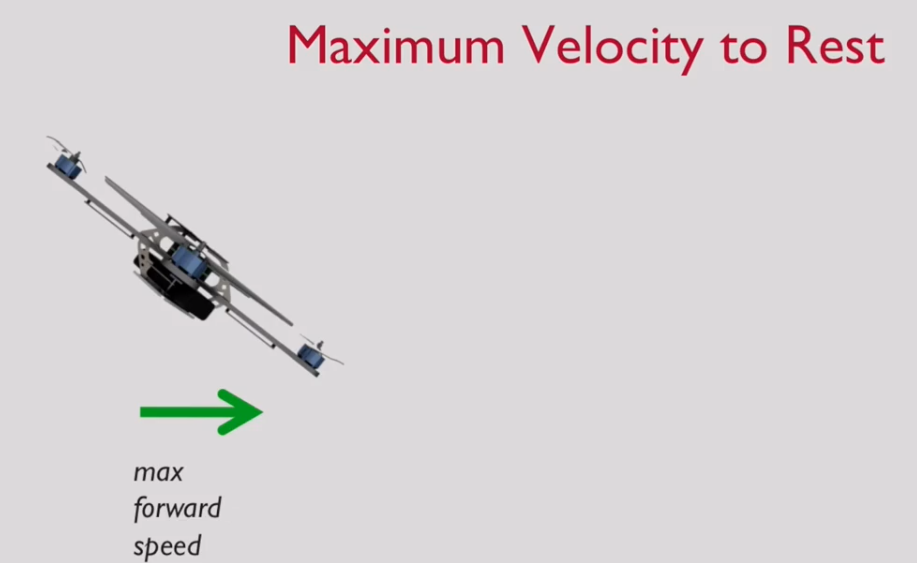
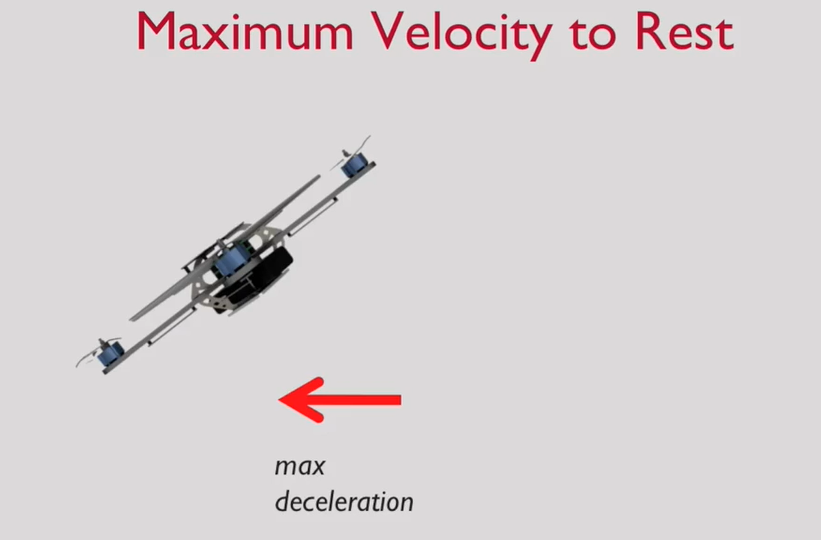
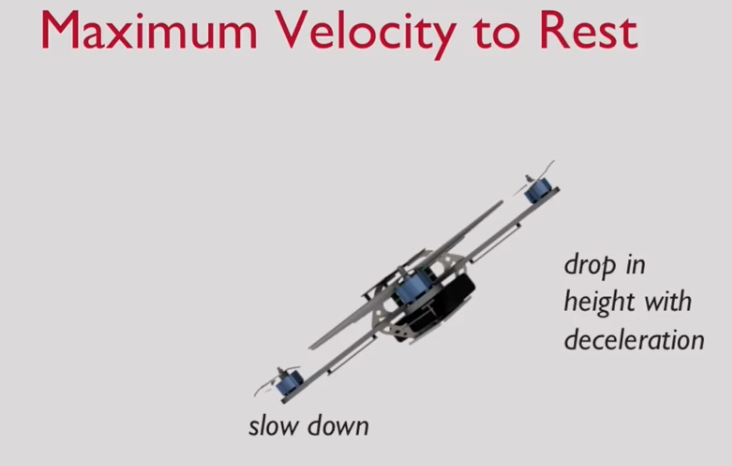
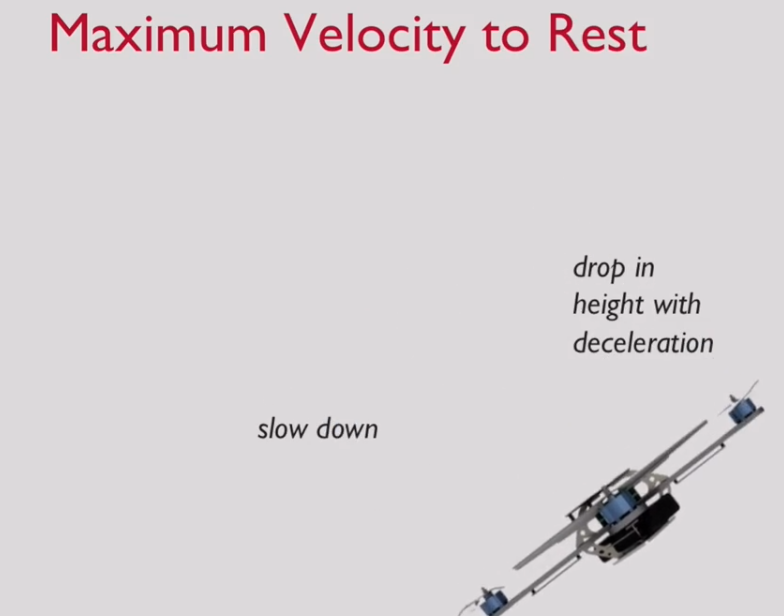
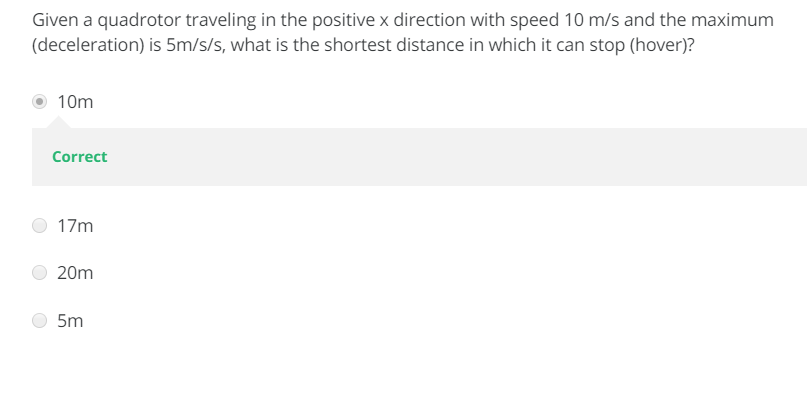
$v_0^2 - v^2 = 2ax,\ where\ v=0\ here.$
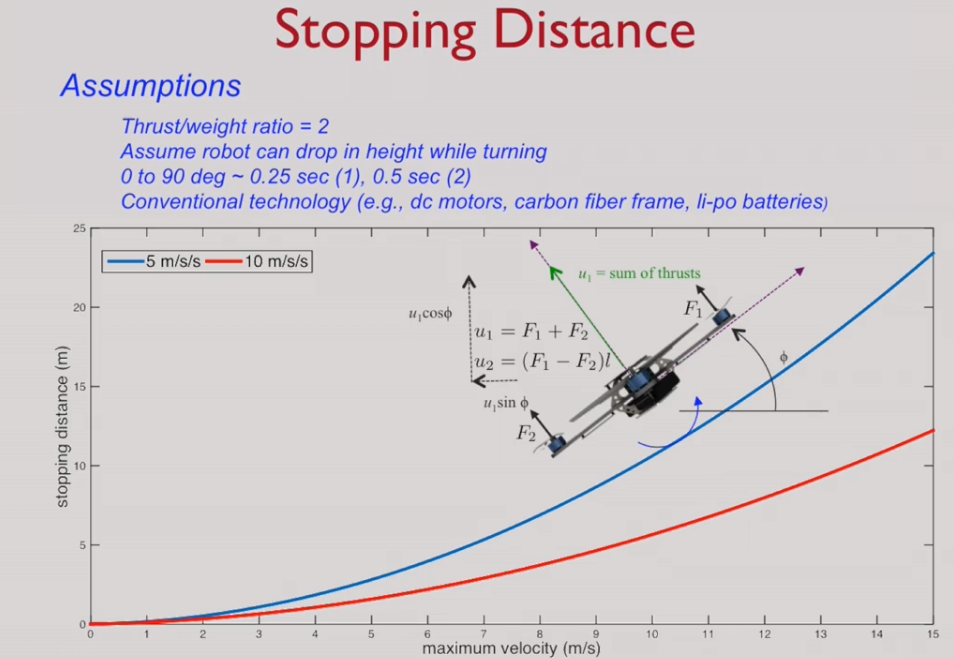
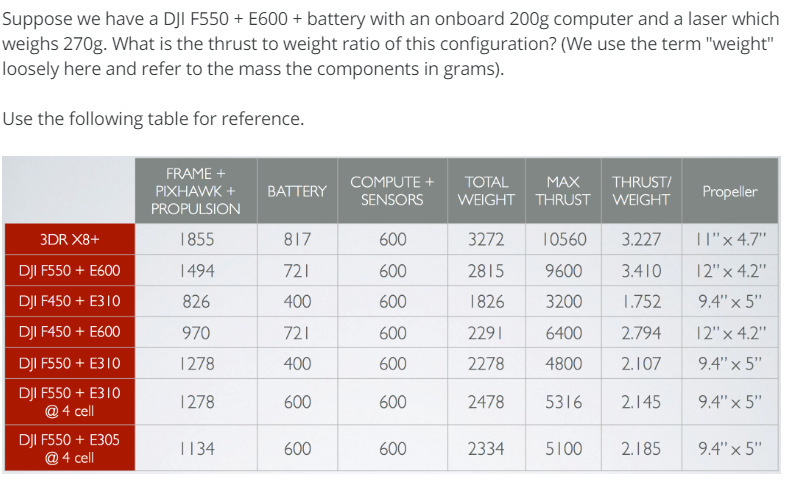
$\frac{9600}{2815-130}$



 in short
in short 




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









