



topic是一种信息传递模式,这里先看下service
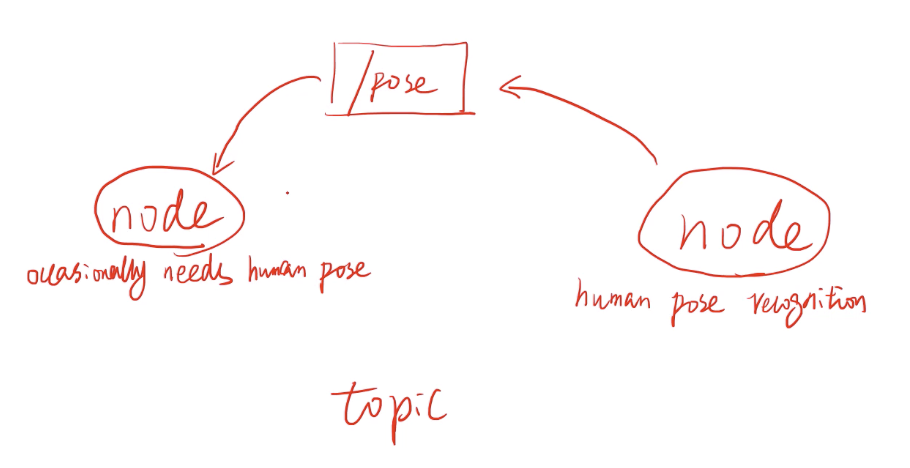
topic是一种单项传输信息的模式,在下面的场景:右node会连续不断发送数据给左node
也可以写一个服务,让右边node接收到信息才开始发送,但是这样写起来很麻烦
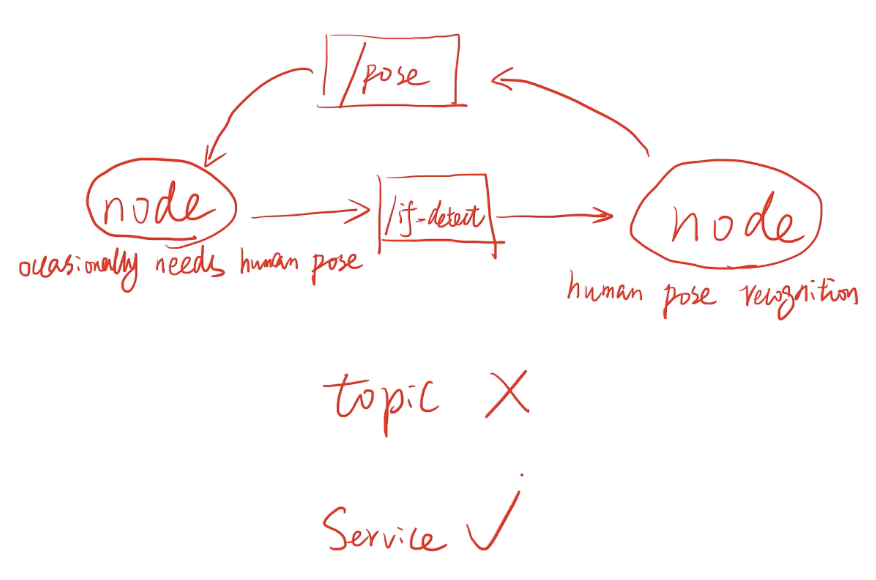
此时应该用service
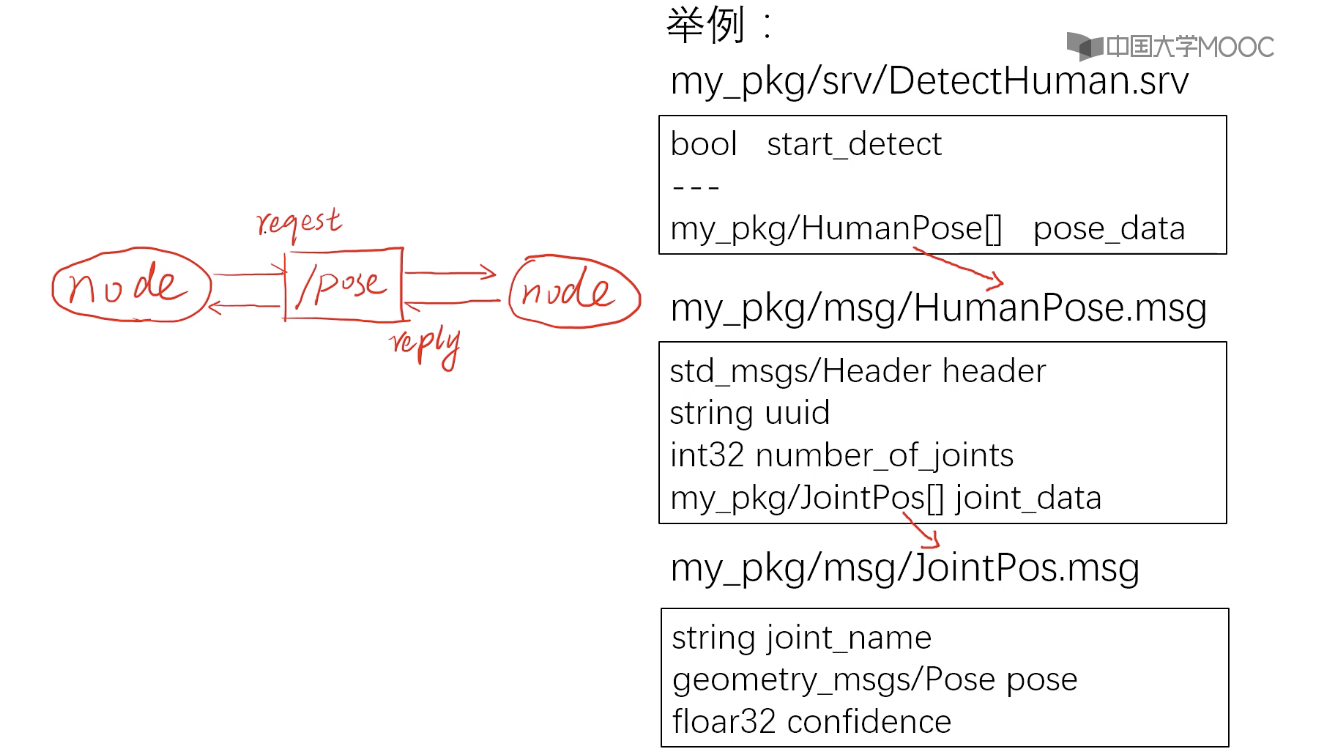
node a发送请求,node b才会发送信息回来
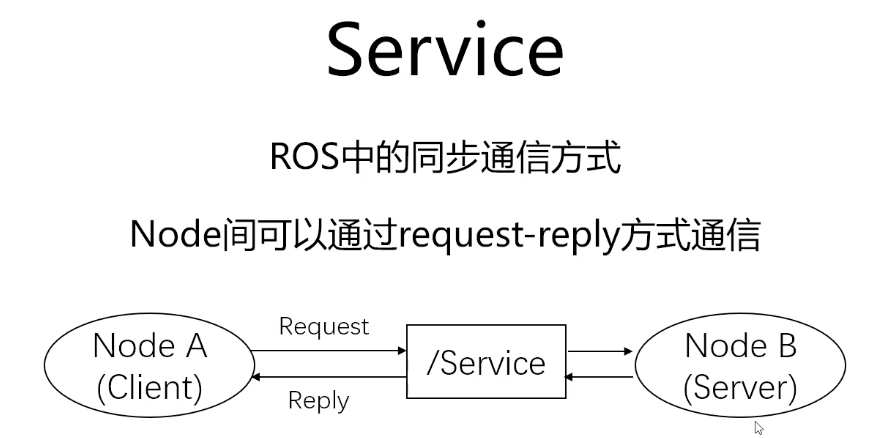
callback - RPC
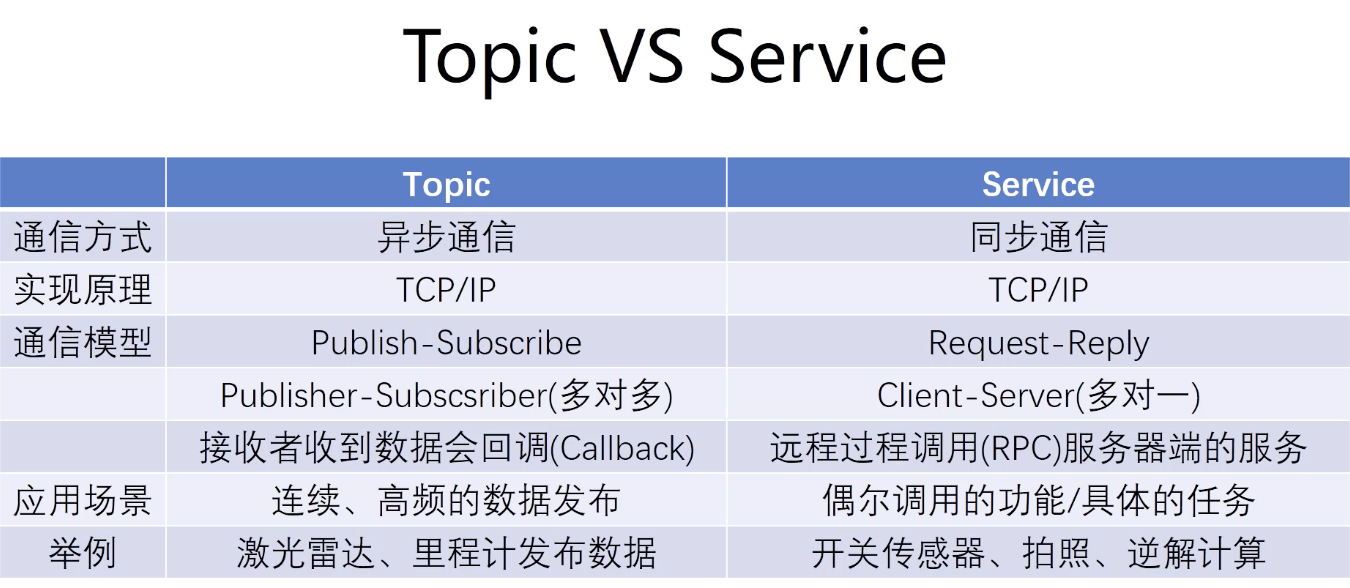
 博客介绍了topic和service两种信息传递模式。topic是单项传输信息模式,如右node可连续给左node发数据;而在特定场景下,用service更合适,即node a发送请求,node b才返回信息,还提到了callback - RPC。
博客介绍了topic和service两种信息传递模式。topic是单项传输信息模式,如右node可连续给左node发数据;而在特定场景下,用service更合适,即node a发送请求,node b才返回信息,还提到了callback - RPC。
topic是一种信息传递模式,这里先看下service
topic是一种单项传输信息的模式,在下面的场景:右node会连续不断发送数据给左node
也可以写一个服务,让右边node接收到信息才开始发送,但是这样写起来很麻烦
此时应该用service
node a发送请求,node b才会发送信息回来
callback - RPC
转载于:https://www.cnblogs.com/ecoflex/p/10804483.html

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























