





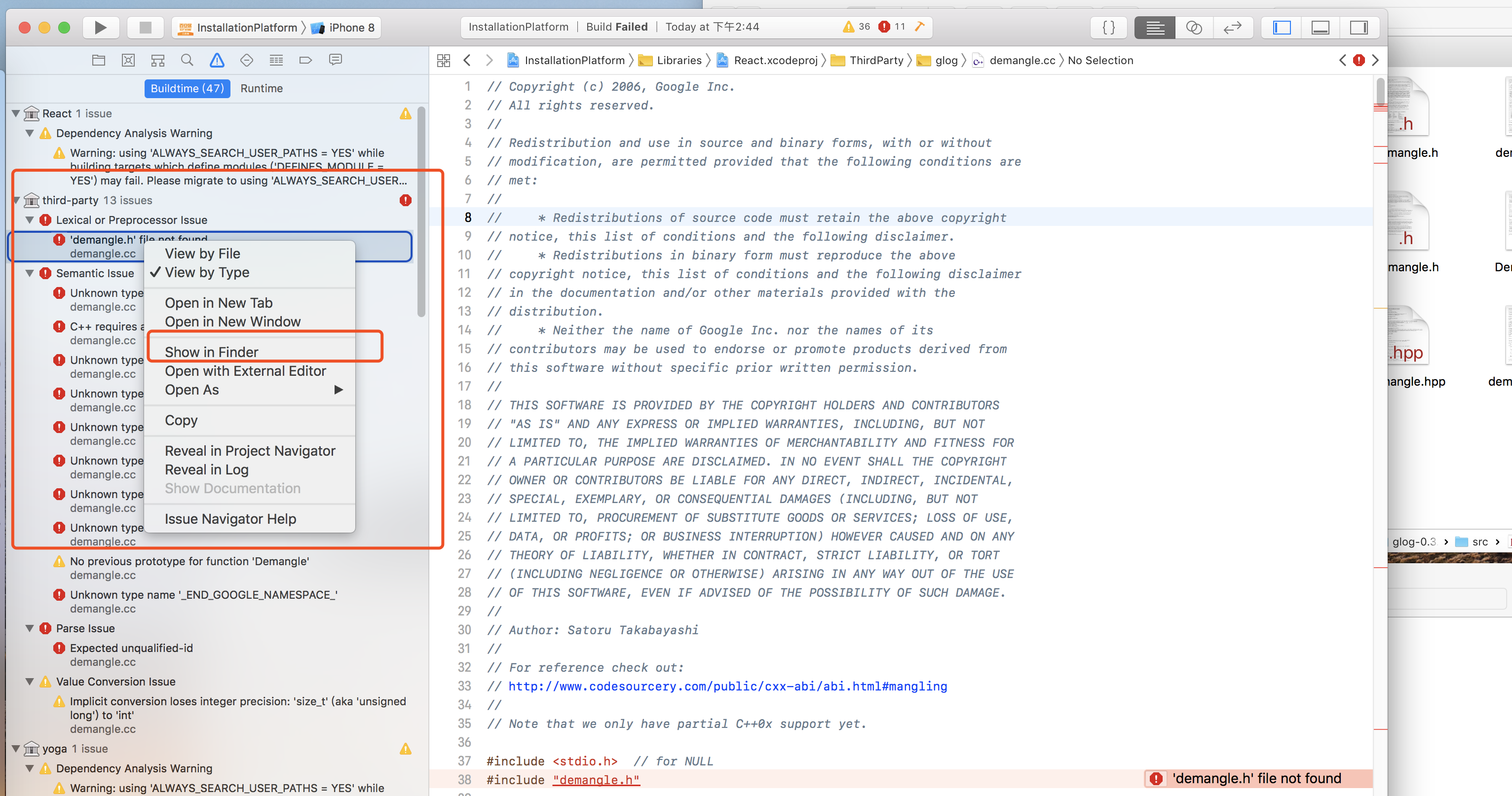
'demangle.h' file not found
文件缺失,找到其他项目同目录文件拷贝过来;
其他文件也能这样处理
类似'config.h' file not found
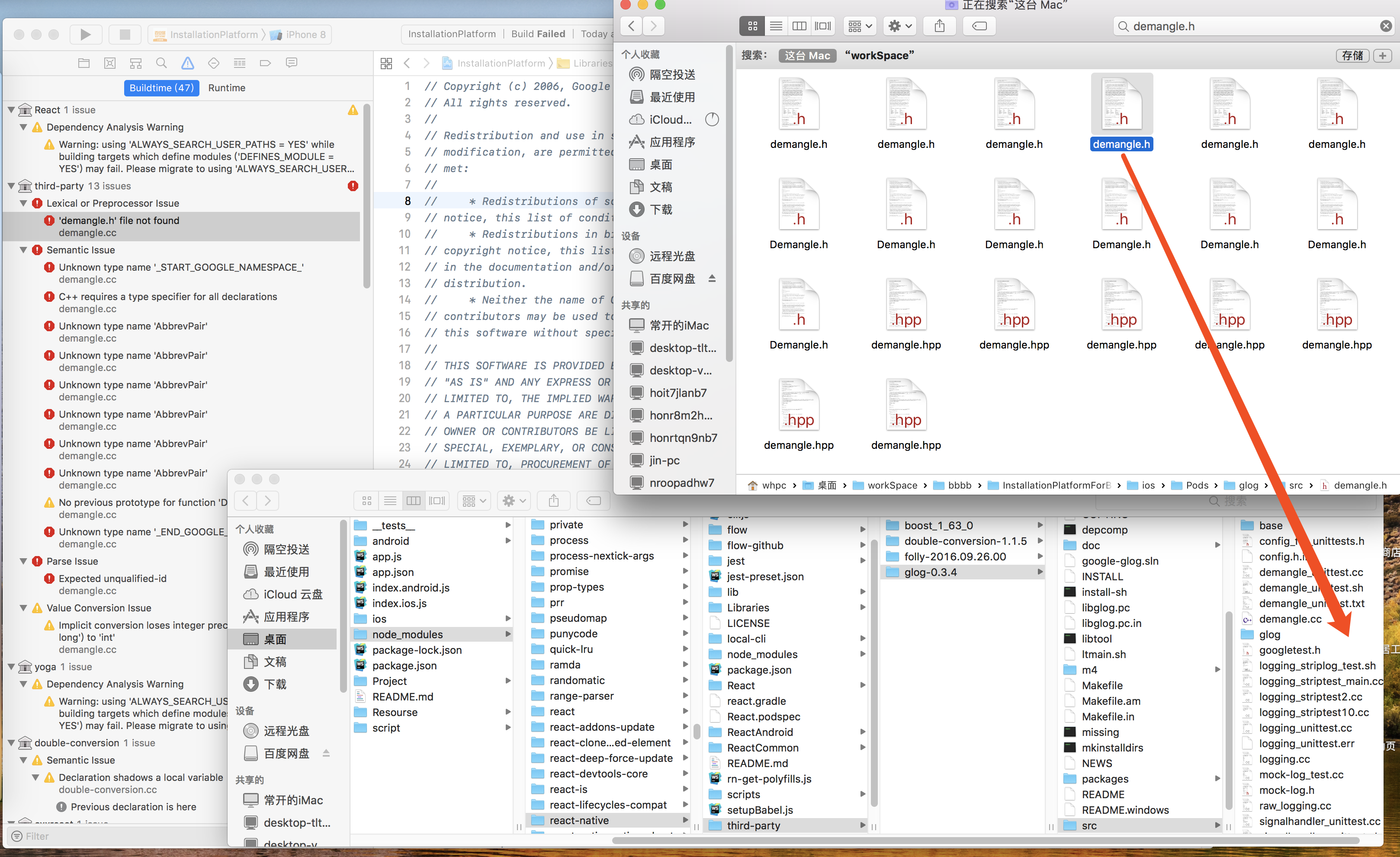

'demangle.h' file not found
文件缺失,找到其他项目同目录文件拷贝过来;
其他文件也能这样处理
类似'config.h' file not found
转载于:https://www.cnblogs.com/gznuhaoge/p/10108443.html
 628
628

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























