






 本文分享了PTA实验作业的编程实践,包括统计大于等于平均分人数、字符串部分复制和求子串在母串中最后一次出现的地址等问题的解决方法,同时总结了指针的应用技巧和快速排序等算法的知识。
本文分享了PTA实验作业的编程实践,包括统计大于等于平均分人数、字符串部分复制和求子串在母串中最后一次出现的地址等问题的解决方法,同时总结了指针的应用技巧和快速排序等算法的知识。
一、PTA实验作业
题目1:统计大于等于平均分人数
1. 本题PTA提交列表

2. 设计思路
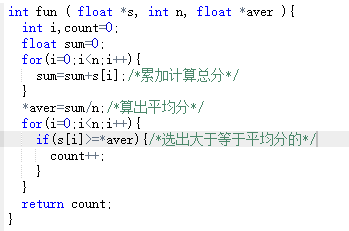
定义fun函数,int fun ( float *s, int n, float *aver )
定义整型变量i,count=0;
定义浮点型变量sum=0;
for i=0 to n-1
sum=sum+s[i];//计算总分
算出平均分*aver
for i=0 to n-1
if s[i]>=*aver//选出大于等于平均分的
count++;
返回count的值3.代码截图
4.本题调试过程碰到问题及PTA提交列表情况说明
提交时显示答案错误,用样例运行结果如下图所示: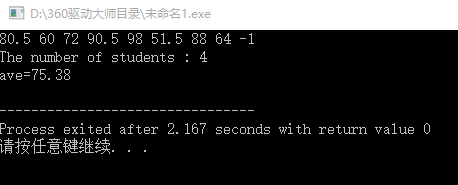
与答案并不符合,这一点困扰了我很久,我感觉程序并没有错误,后来又仔细浏览我自己的代码,发现我把sum定义成了整型,所以才会出现这种错误,把sum定义成浮点型就行了。
题目2:使用函数实现字符串部分复制
1. 本题PTA提交列表

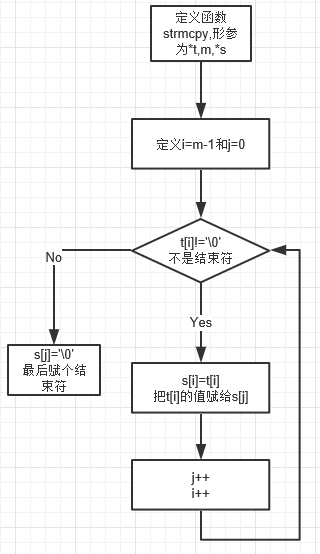
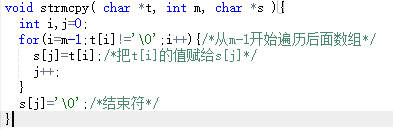
2. 设计思路
3.代码截图
4.本题调试过程碰到问题及PTA提交列表情况说明
第一次提交时显示全部测试点答案错误,后来发现是循环的初始点写错了;又提交了一次,这次显示部分正确,这一次我就有点疑惑了,测试点说当m超过或等于长度时答案错误,于是又开始检查了几次代码,发现我犯了低级错误,没有给字符数组的最后赋值结束符‘\0',添加后答案就正确了。
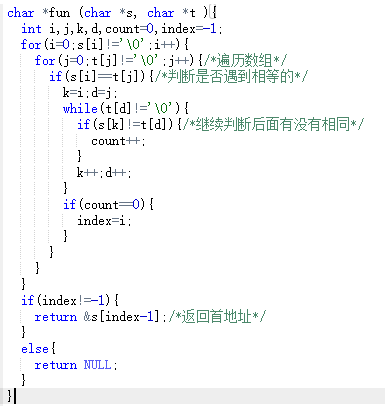
题目3:求子串在母串中最后一次出现的地址
1. 本题PTA提交列表

2. 设计思路
定义字符指针型函数*fun (char *s, char *t )
定义变量i,j,k,d,count=0,index=-1
for i=0 to s[i]!='\0'
for j=0 to t[j]!='\0'//遍历数组
if s[i]等于t[j]
k=j;d=j;//初始化下标
while t[d]!='\0'
if s[k]不等于t[d]
count++;//用于判断是否都相等
k++;d++;//下标递增
if count等于0
index=i;//把下标存起来
if index不等于-1
返回首地址&s[index-1]
否则返回空指针NULL3.代码截图
4.本题调试过程碰到问题及PTA提交列表情况说明
本题思路清晰,PTA提交一遍就过,并没有遇到问题。
二、截图本周题目集的PTA最后排名

三、阅读代码
1.快速排序法
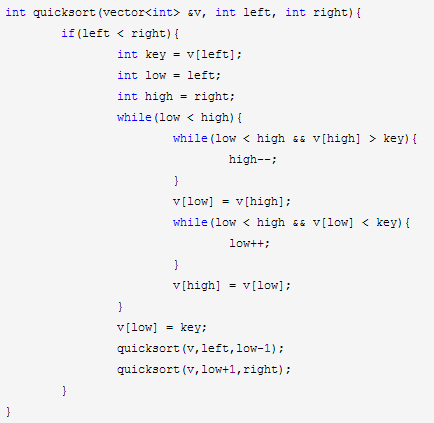
功能:实现排序;快速排序是找出一个元素作为基准,然后对数组进行分区操作,使基准左边元素的值都不大于基准值,基准右边的元素值都不小于基准值,如此作为基准的元素调整到排序后的正确位置。递归快速排序,将其他n-1个元素也调整到排序后的正确位置。最后每个元素都是在排序后的正确位置,排序完成。
优点:快速排序是冒泡排序的改进版,在内存使用、程序实现复杂性上表现优秀,是目前已知的最快的排序方法。
2.大整数加法:求两个不超过200位的非负整数的和
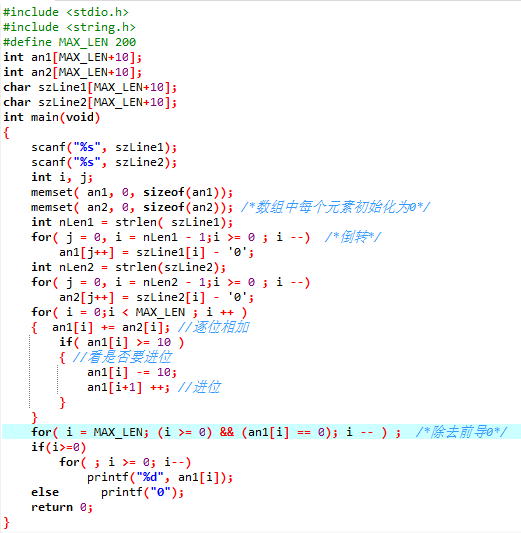
求两个不超过200位的非负整数的和,这涉及到了高精度计算问题,一般的变量形式无法保存如此大的数字,所以可以借助数组来完成这一个问题;模拟列竖式做加法,从个位开始逐位相加,超过或达到10 则进位,相加的结果直接存放在an1 中。
四、本周学习总结
1.自己总结本周学习内容
- 1.指针可以作为函数的参数,通过以变量或数组的地址为实参,把地址传给函数。
- 2.运用指针可以在函数里直接对数据进行修改,相应main函数里的数据也随之修改,实现函数返回多个值。
- 3.指针与指针相加是不可以的,但指针还是可以进行加法运算的,可以运用指针的加法运算来进行循环控制。
- 4.学了一些常用的字符串处理函数,在头文件string.h里,例如字符串复制函数strcpy,字符串连接函数strcat,字符串比较函数strcmp,字符串长度函数strlen。
2.罗列本周一些错题

这题的第四个空我填*p-32,把最后一个减去ASCII码从而使小写改成大写,然而我没有意识到当最后一个字符不是小写字母时是不用改的,但我填的会把所有都减去32,这明显是不可行的,可以用函数toupper来解决这个问题。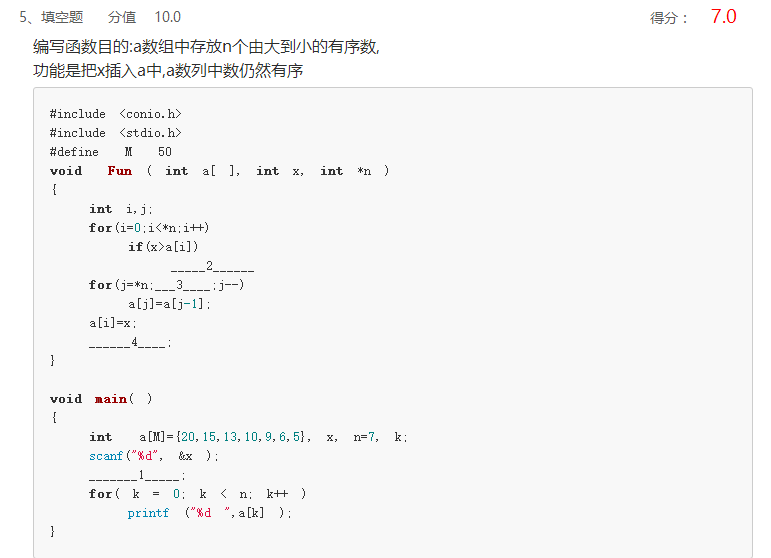
在第四空,我填了*n++,但我忽略了自增运算符++的优先级比指针运算符*高,这就不符合我的目的,所以应该用*n=*n+1;在这个练习题集里我多次犯了这个错误,下次一定不能再犯这个错误。

















 3792
3792

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









