






Google maps谷歌地图挺不错的,界面清新自然,操作起来也很简单,而且地图采用了数据实时更新下载,相比大部分的GPS导航软件动不动就几百MB的大地图,Google maps的体积很小,软件不到2MB,总是有种“绿色”的感觉,所以我一直都会在手机保留这个导航软件。
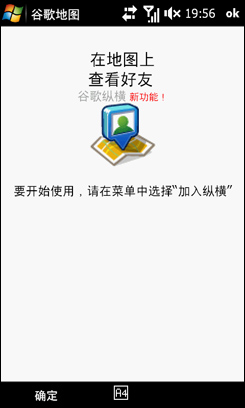
最近Google玩新花样,一个叫做“Google纵横”的功能,其实就是今年二月份流传的“Google Latitude”,目前已经有中文版本的Google地图支持这个功能了,我也在第一时间下载了3.0.0.12版试用。

以前Google地图只是单一的导航软件,现在Google地图成了“Google纵横”的平台,我们在这个地图平台上,可以通过“纵横”功能,和好朋友交流位置信息。既然有了身份的识别,自然就需要一个账号了,所以我依照“Google纵横”的提示,先上Google的官网注册一个Google帐户,这个账户就是以后我在地图上的身份了。


朋友Candy邀我明天陪她去买数码玩具,她的S60手机也安装了带Google纵横的Google地图,嘿嘿,我刚申请的Google账号派上用场了!我现在使用的机子的多普达的Touch HD,480*800分辨率的3.8英寸大屏幕,看地图十分轻松!
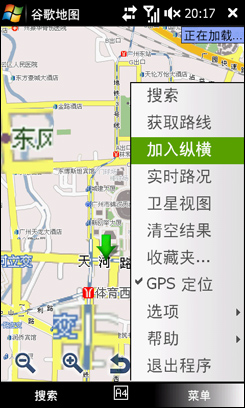
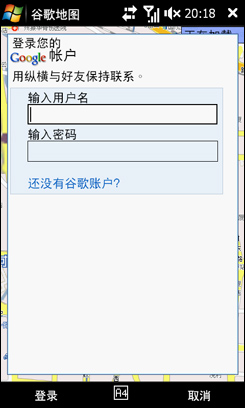
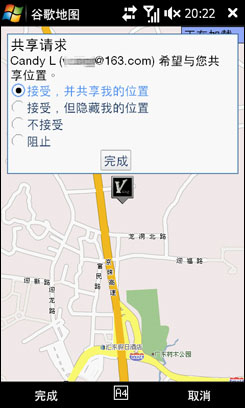
我打开Google地图,点击右下角的菜单,可以看到“加入纵横”功能,点一下,输入Google账户的用户名和密码,点一下登陆,就进入了我的好友列表,上面显示红色的“1个新的共享请求”,看来是Candy加我了。

点一下,果然是Candy,这个时候可以设置我自己的状态,可以向他共享我现在的位置,也可以隐藏,就选接受吧。这是回到好友列表,就可以看到Candy了。

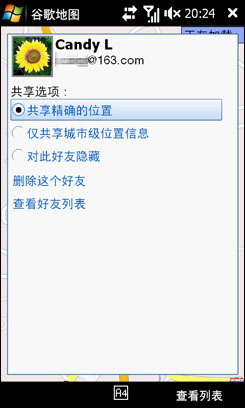
刚才是Candy加我,如果我要主动加朋友为好友,应该怎么操作?“添加好友”功能就在好友列表的下方嘛,点一下,输入对方的Google账号,其实就是对方的E-mail地址,然后设置是否公开自己的位置信息,就OK了。Google纵横还是延续了Google地图简单、易用的理念。

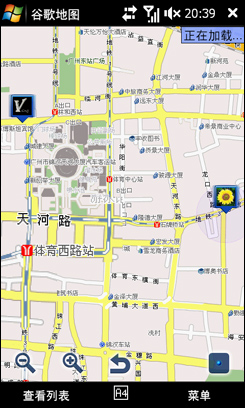
与Candy加为好友,第一时间看看她在哪里!可以看到Candy的向日葵头像在天河东路,我现在则在天河北路。

十五分钟以后……
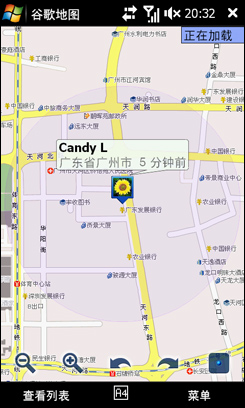
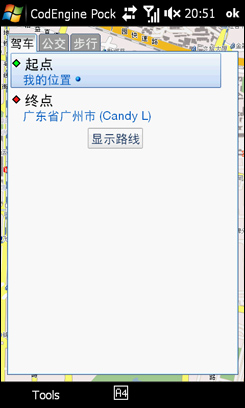
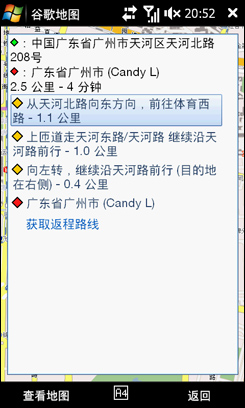
Candy来电“hello,我已经到太平洋数码广场,我们会和吧”,嘿嘿,让我看看Google纵横准不准,打开一看,Candy果然到了,在石牌西路。让Google地图帮我规划路线吧,点一下“获取路线”,起点是我目前的位置,终点是Candy的位置。
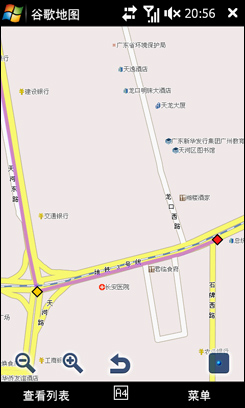
几秒钟,路线就规划好了,除了文字的表述,地图上有红色的线将线路表示出来。可以看到路线的终点就是石牌西路,太平洋数码广场!


有了Google纵横的帮忙,出行与友人见面变得如此简单有趣。对于很多集体出行的活动,例如车友会出游等等,在车上打开Google纵横,就能够掌握大家目前的位置,不用担心有掉队的情况,能够实时更新友人的位置,这正是Google纵横最大的意义所在。

















 183
183

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









