



 本文档提供CentOS 6.6的下载链接与安装步骤指导,包括解决安装过程中可能出现的问题,如无法连接MKS:套接字连接尝试次数太多等,并介绍基本操作如登录密码设置及鼠标控制方式。
本文档提供CentOS 6.6的下载链接与安装步骤指导,包括解决安装过程中可能出现的问题,如无法连接MKS:套接字连接尝试次数太多等,并介绍基本操作如登录密码设置及鼠标控制方式。
1、下载
VMware-workstation-full-14.0.0-6661328.exe 安装步骤可借鉴网上 链接: https://pan.baidu.com/s/1miEEsDq 密码: 1d26
2、’下载
CentOS-6.6-x86_64-bin-DVD1(1).iso安装步骤可借鉴网上
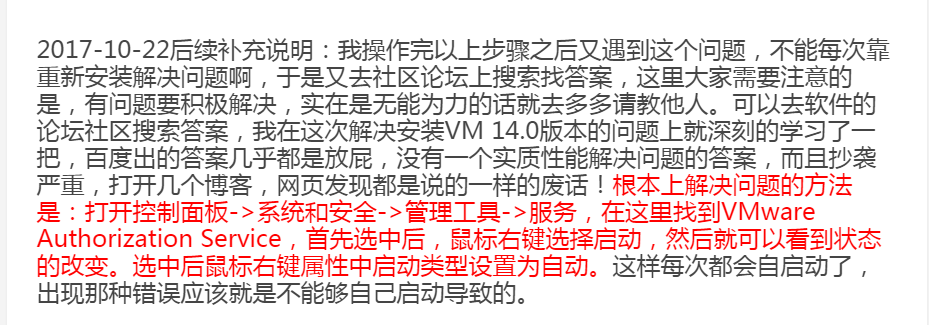
3.安装的时候遇到问题
无法连接 MKS: 套接字连接尝试次数太多 解决: 参照:http://blog.youkuaiyun.com/userpass_word/article/details/78292108
4、首次登录的用户密码和root是一致的,就是安装的时候显示的那个
5.ctrl +G 鼠标进入虚拟机。ctrl+alt鼠标出来
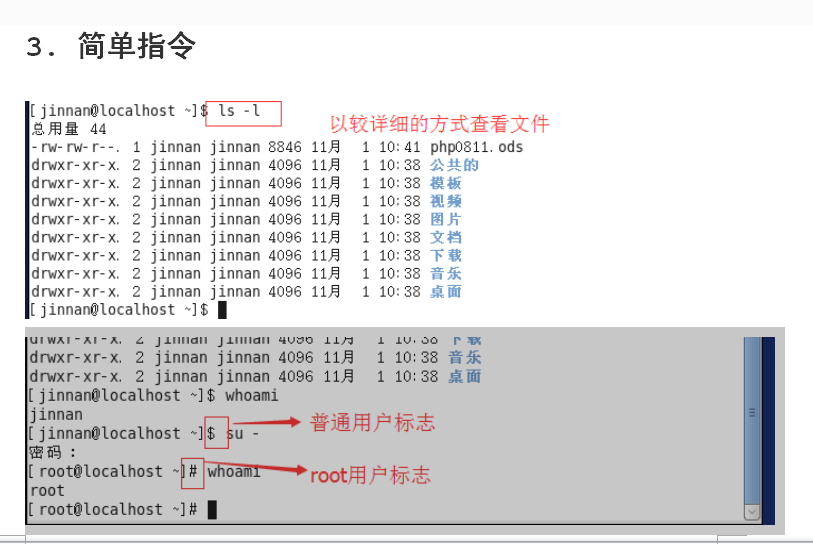
6,桌面程序到命令行程序
7.开始你的linux学习之旅吧

















 4208
4208

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









