






一 题面
二 分析
在平面几何中,判断两线段相交的方法一般是使用跨立实验。但是这题考虑了非严格相交,即如何两个线段刚好端点相交则也是相交的,所以还需要使用快速排斥实验。
这里参考并引用了![]() TangMoon 博客。
TangMoon 博客。
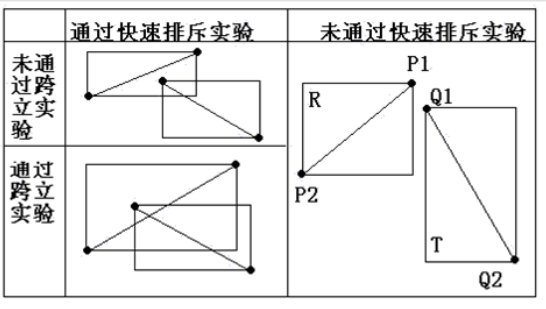
1.快速排斥实验
由于两个点作为矩形的两个斜对角线端点可以确定一个矩形,则根据两个点确定一个向量,两个向量显然可以确定两个矩形。
对于快速排斥实验,也可尝试逆向思维,如果判断让两个向量确定的两个矩形是否相交部分,相当于判断两个矩形没有相交部分的反。
具体条件就是a.其中一个矩形的最小横坐标大于另一个矩形的最大横坐标;b.其中一个矩形的最小纵坐标大于另一个矩形的最大纵坐标。
2.跨立实验
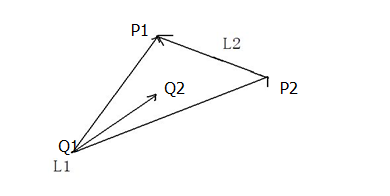
如图,根据以$Q1$为起点
${\overrightarrow{Q_{1}P_{2}} }\times {\overrightarrow{Q_{1}Q_{2}}}$
${\overrightarrow{Q_{1}Q_{2}} }\times {\overrightarrow{Q_{1}P_{1}}}$
判断这两个向量的正负,如果两个值正负相同,表示$\overrightarrow{Q_{1}Q_{2}}$在两向量中间,但这显然还不够,因为可能$Q2$没跨过去,所以还需要在$P1$判断一次。
那么这样把上述两条件都判断后,就能保证两线段非严格相交了。
三 AC代码
1 #include <iostream> 2 #include <cstring> 3 #include <cstdio> 4 5 using namespace std; 6 const int MAXN = 200; 7 struct P 8 { 9 int a, b; 10 P(){} 11 P(int x, int y): a(x),b(y){} 12 P operator + (P t) 13 { 14 return P(a + t.a, b + t.b); 15 } 16 P operator - (P t) 17 { 18 return P(a - t.a, b - t.b); 19 } 20 P operator * (P t) 21 { 22 return P(a*t.a, b*t.b); 23 } 24 int dot(P t) 25 { 26 return a*t.a + b*t.b; 27 } 28 int det(P t) 29 { 30 return a*t.b - b*t.a; 31 } 32 }; 33 int px[MAXN], py[MAXN]; 34 int qx[MAXN], qy[MAXN]; 35 36 bool solve(int t1, int t2) 37 { 38 if(min(px[t1], qx[t1]) > max(px[t2], qx[t2]) || min(px[t2], qx[t2]) > max(px[t1], qx[t1]) 39 || min(py[t1], qy[t2]) > max(py[t2], qy[t2]) || min(py[t2], qy[t2]) > max(py[t1], qy[t1])) 40 return false; 41 P p1, p2, p3; 42 p1 = P(qx[t1]-px[t2], qy[t1]-py[t2]); 43 p2 = P(qx[t2]-px[t2], qy[t2]-py[t2]); 44 p3 = P(px[t1]-px[t2], py[t1]-py[t2]); 45 if(p1.det(p2) * p2.det(p3) < 0) 46 return false; 47 p1 = P(px[t2]-px[t1], py[t2]-py[t1]); 48 p2 = P(qx[t1]-px[t1], qy[t1]-py[t1]); 49 p3 = P(qx[t2]-px[t1], qy[t2]-py[t1]); 50 if(p1.det(p2) * p2.det(p3) < 0) 51 return false; 52 return true; 53 } 54 55 int par[MAXN]; 56 57 int find(int x) 58 { 59 return par[x] == x ? x : par[x] = find(par[x]); 60 } 61 void unite(int x, int y) 62 { 63 int f1 = find(x), f2 = find(y); 64 if(f1 == f2) 65 return; 66 else 67 par[f1] = f2; 68 } 69 70 71 int main() 72 { 73 //freopen("input.txt", "r", stdin); 74 int n; 75 while(scanf("%d", &n) == 1) 76 { 77 78 if(n == 0) break; 79 for(int i = 1; i <= n; i++) 80 { 81 par[i] = i; 82 scanf("%d%d%d%d", &px[i], &py[i], &qx[i], &qy[i]); 83 } 84 for(int i = 1; i <= n; i++) 85 for(int j = i + 1; j <= n; j++) 86 { 87 if(solve(i, j)) 88 unite(i, j); 89 } 90 int x, y; 91 while(scanf("%d%d", &x, &y) != EOF) 92 { 93 if(x == 0) break; 94 if(find(x) == find(y)) 95 printf("CONNECTED\n"); 96 else 97 printf("NOT CONNECTED\n"); 98 } 99 } 100 return 0; 101 }

















 730
730

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









