 机器人行走与控制挑战
机器人行走与控制挑战




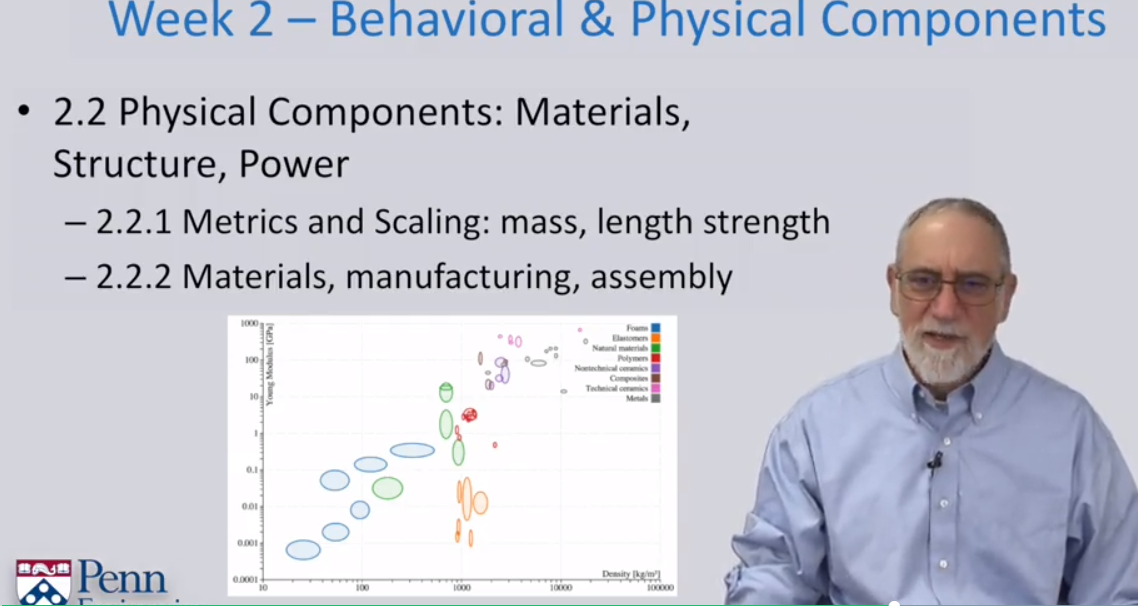
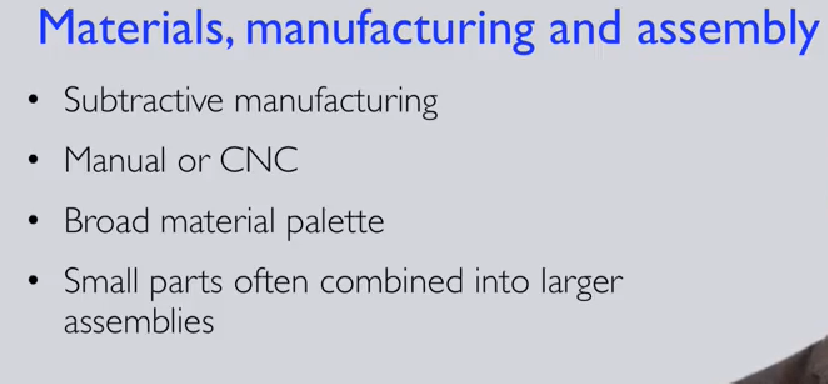
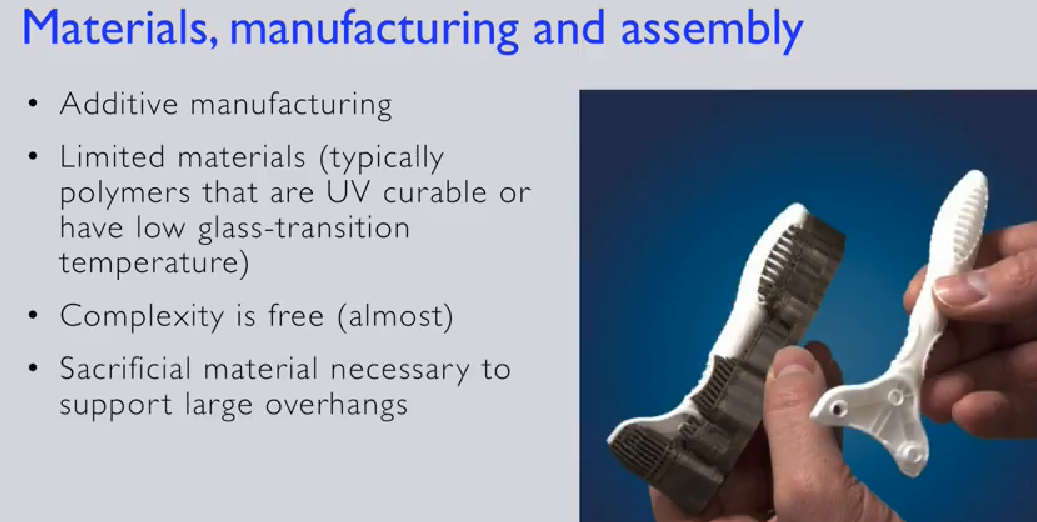
 本文探讨了机器人在不同环境下的行走策略,包括准静态行走、爬坡能力及压缩性材料应用。通过对比气体与油压作动器的性能,揭示了输入力与频率对输出幅度的影响,以及直接驱动在蛋形物体操作上的优势。
本文探讨了机器人在不同环境下的行走策略,包括准静态行走、爬坡能力及压缩性材料应用。通过对比气体与油压作动器的性能,揭示了输入力与频率对输出幅度的影响,以及直接驱动在蛋形物体操作上的优势。
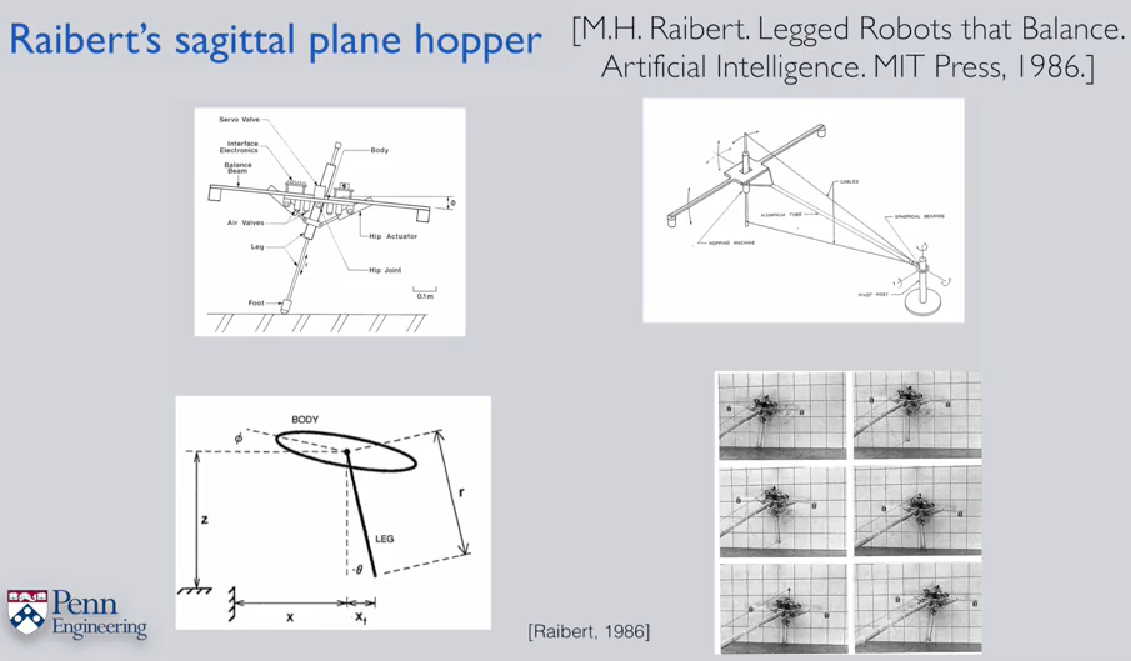
1983 mit

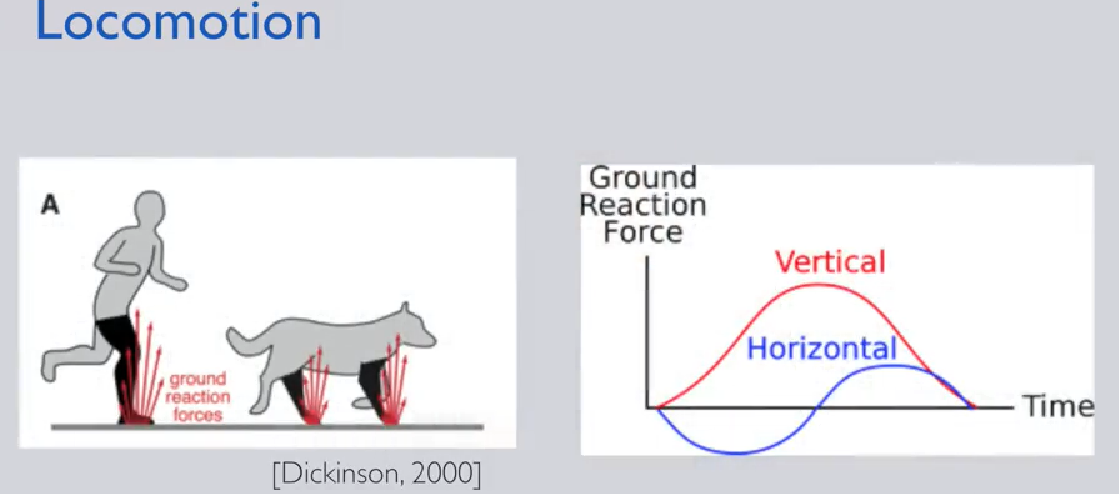
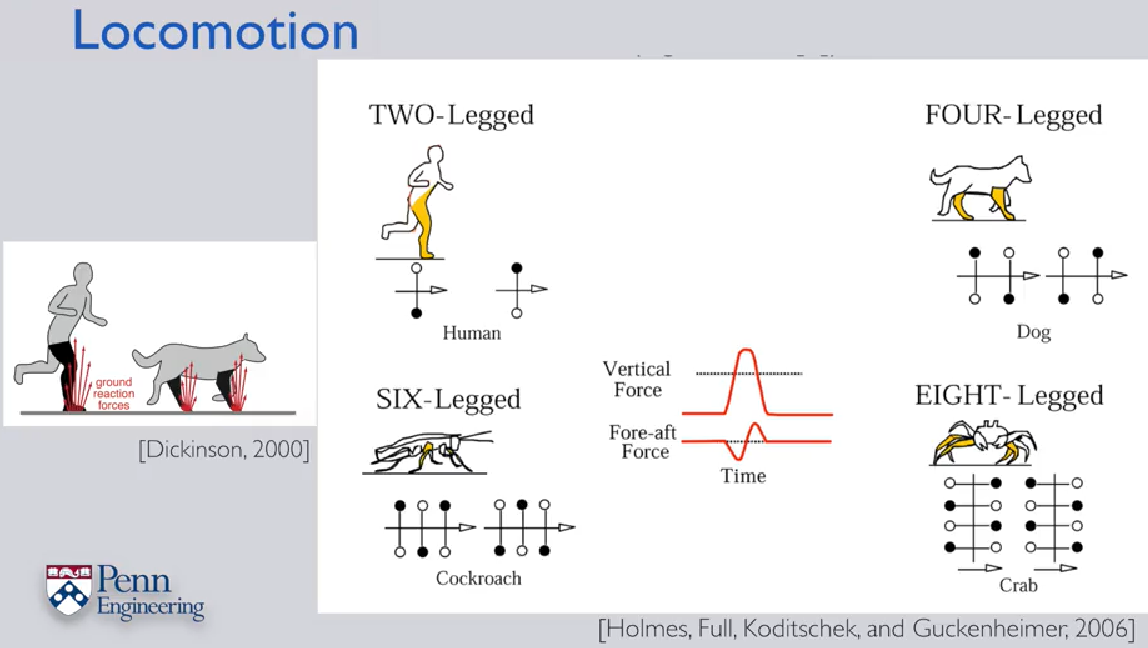
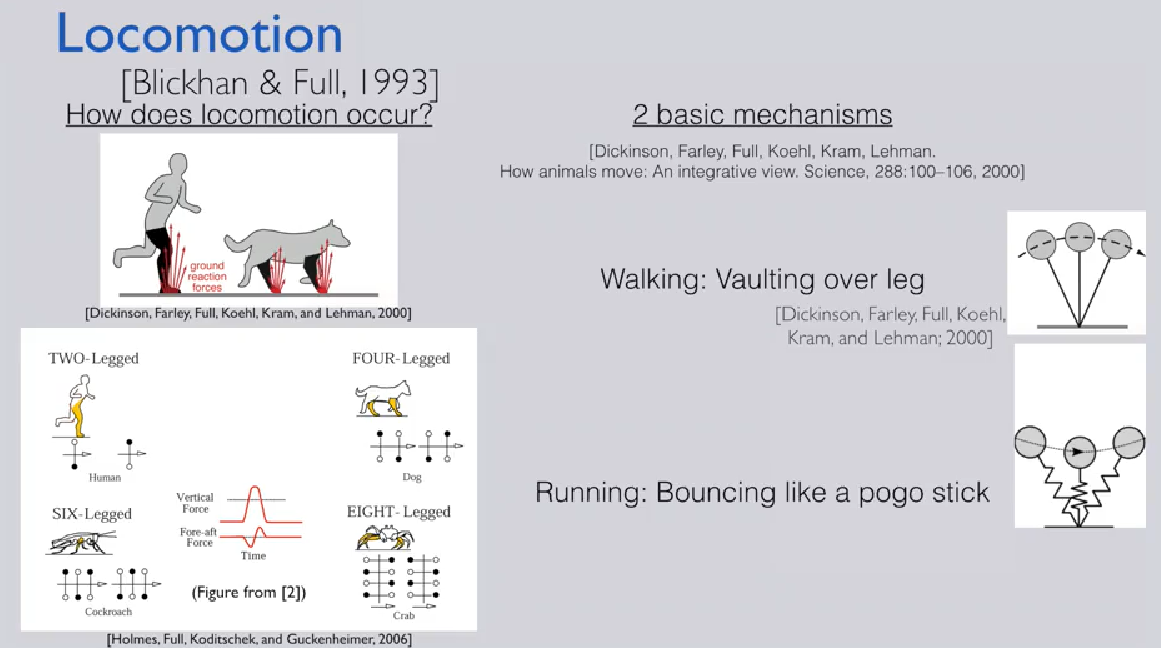
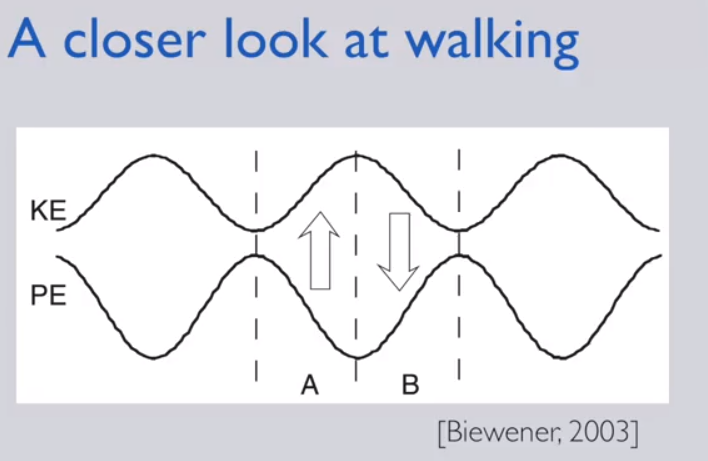
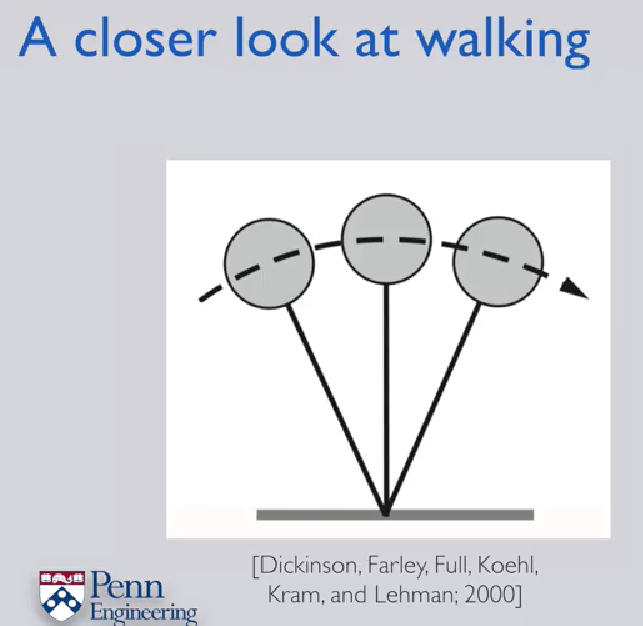
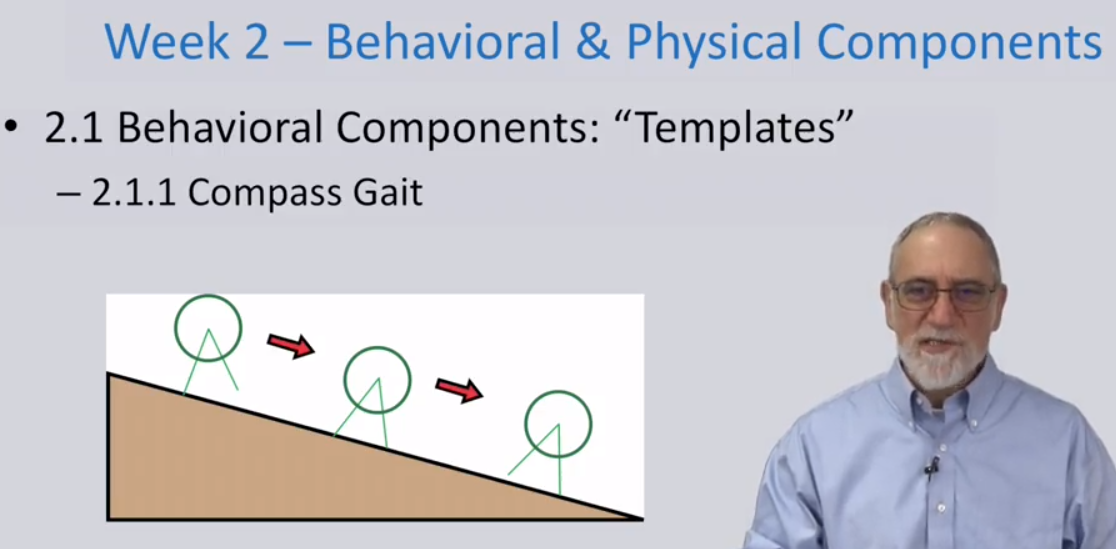
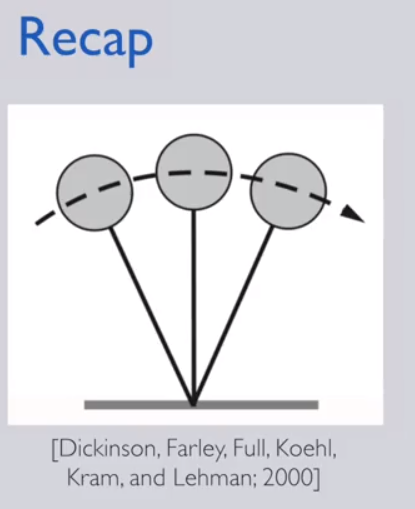
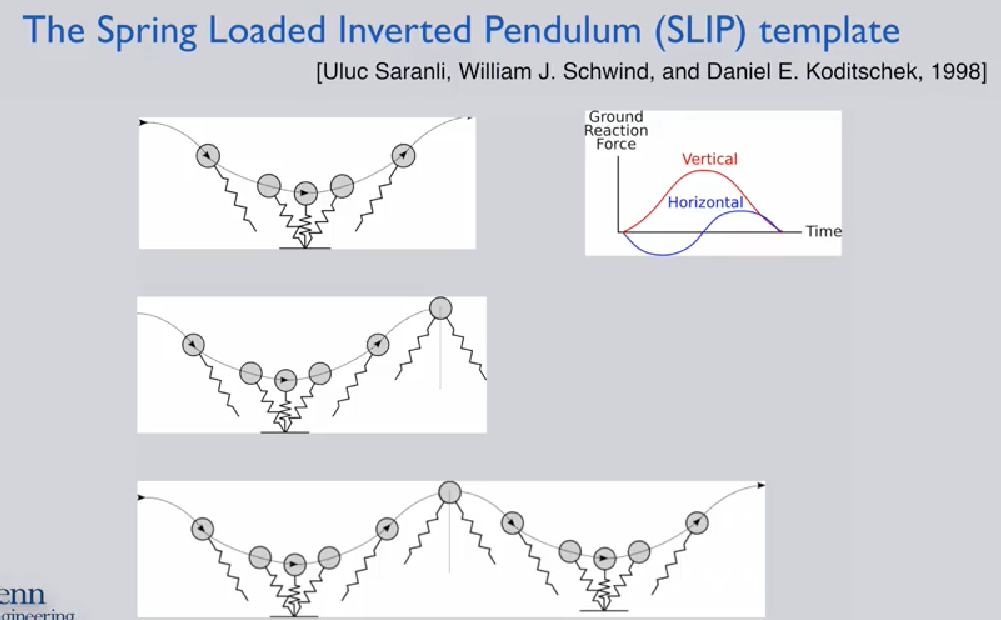
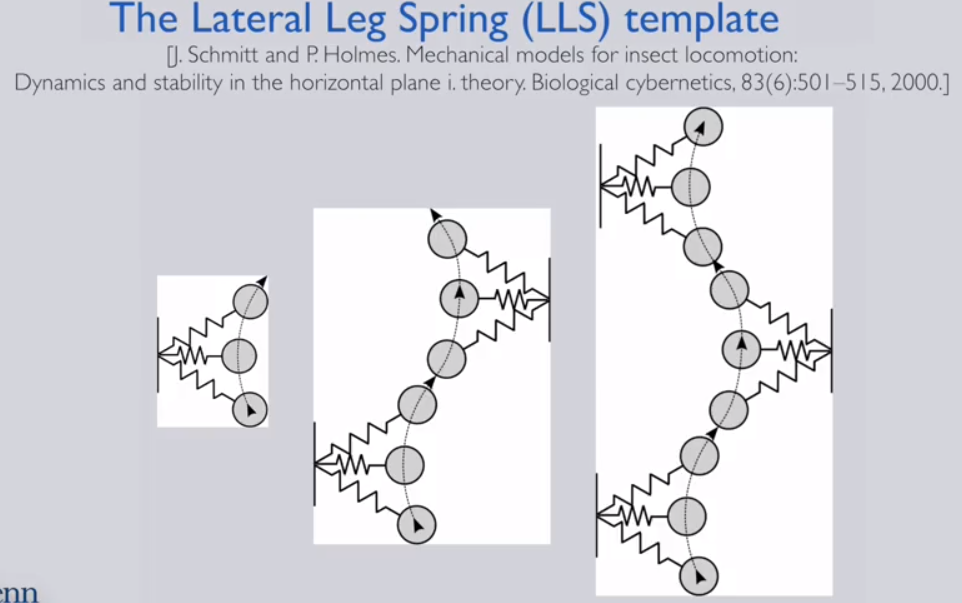
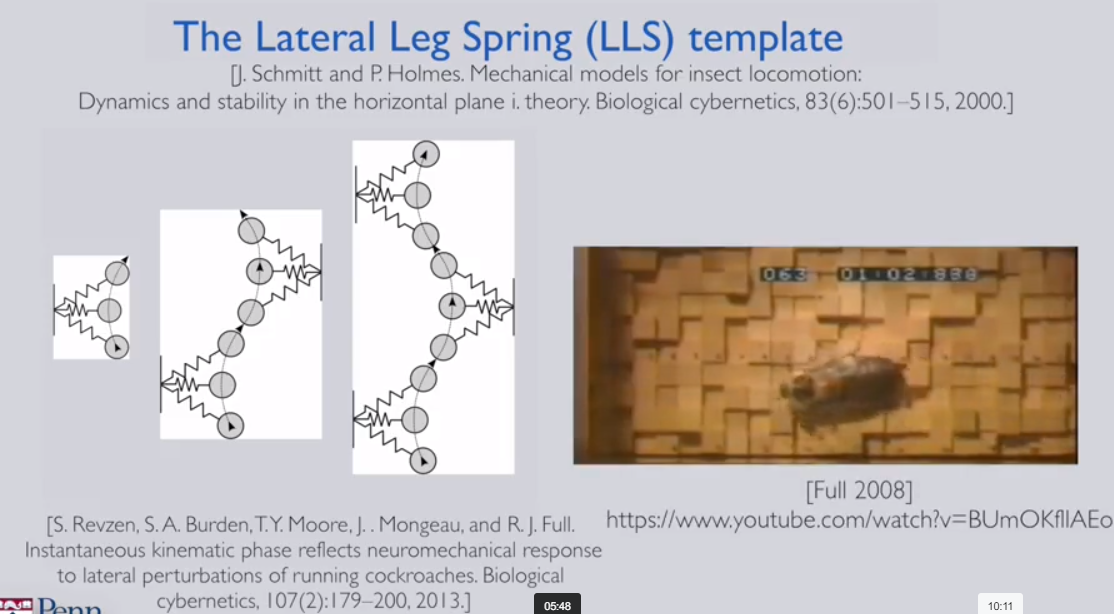
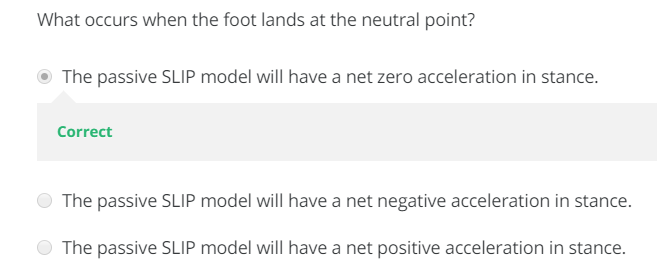
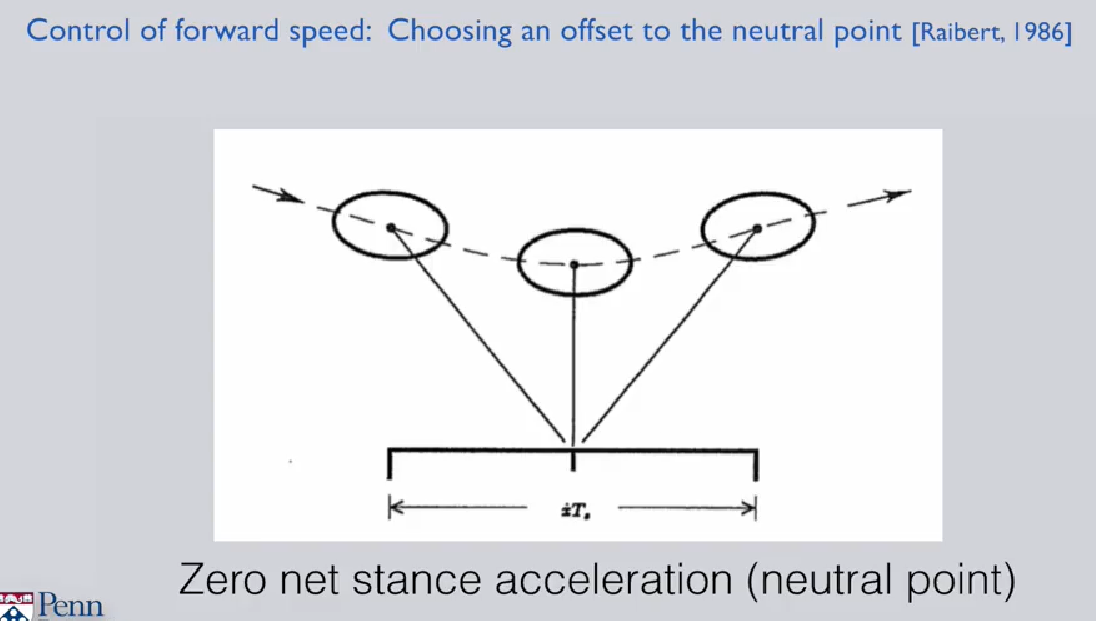
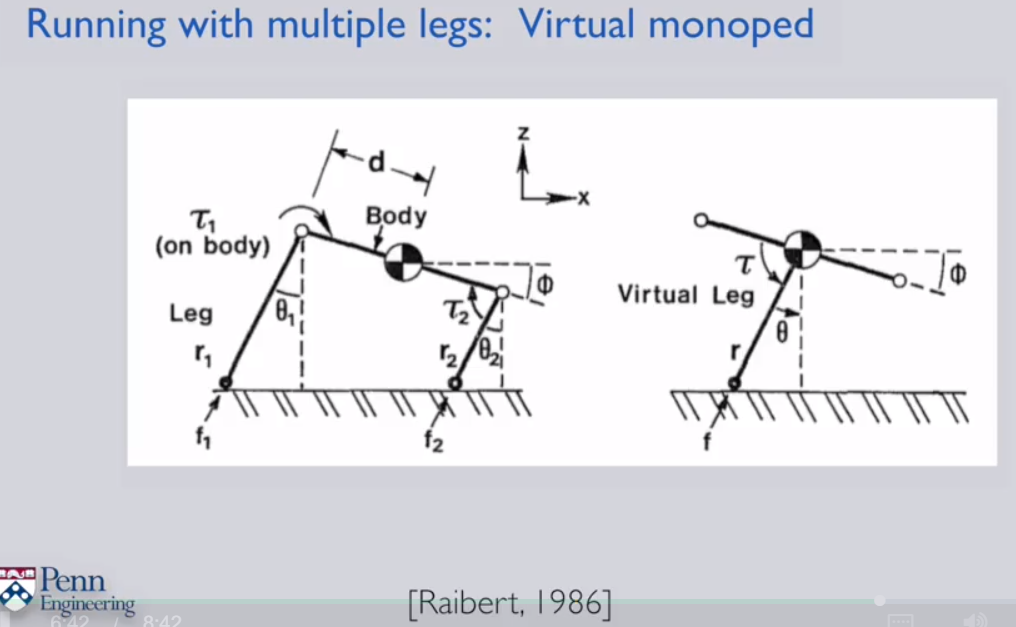
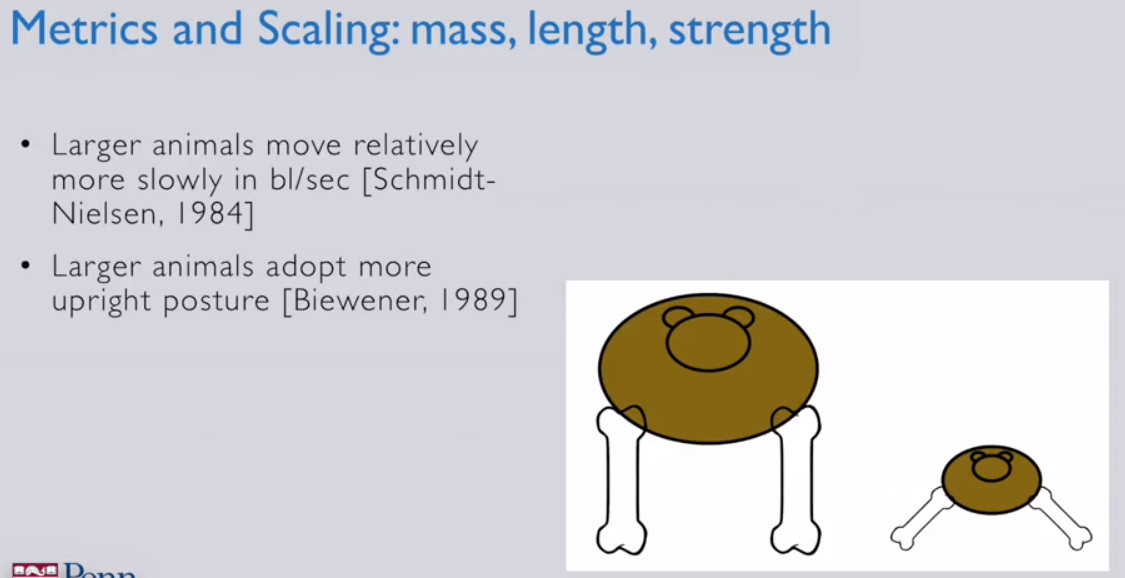
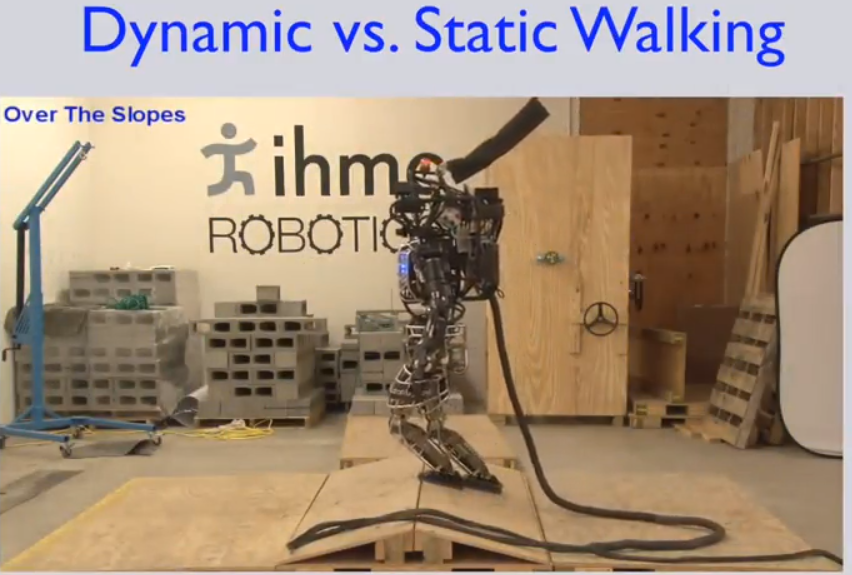 quasi-static walking
quasi-static walking
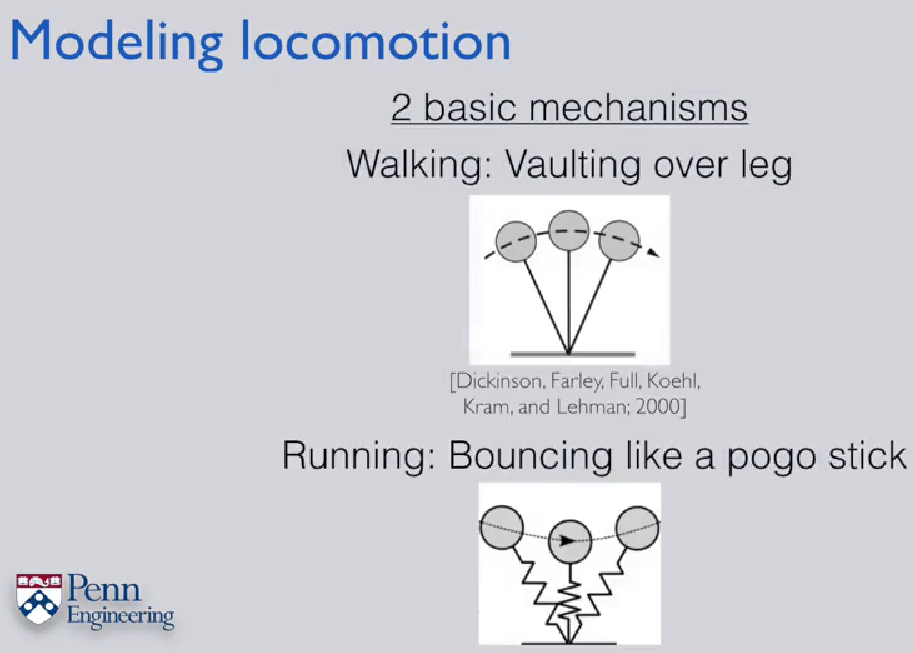
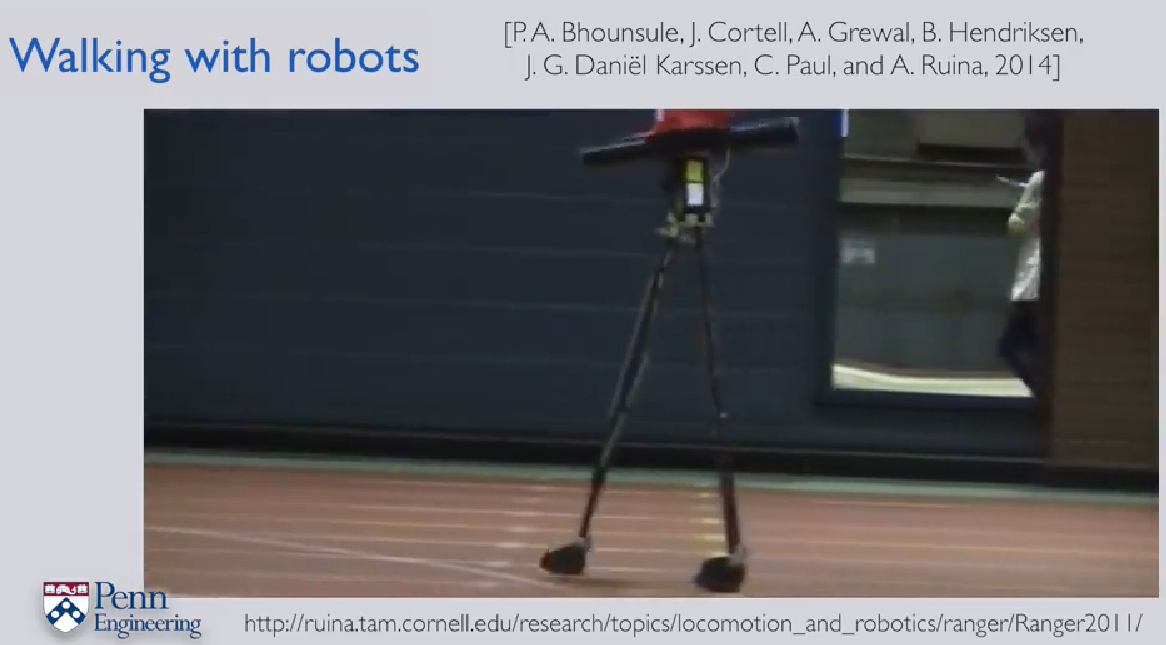


the above examples are with almost no control in computer level!!!!!!!!
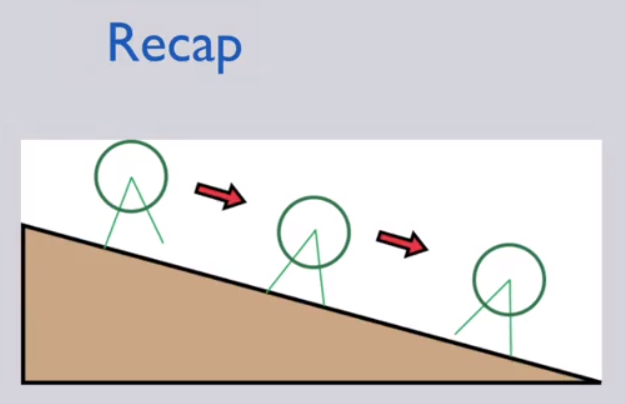

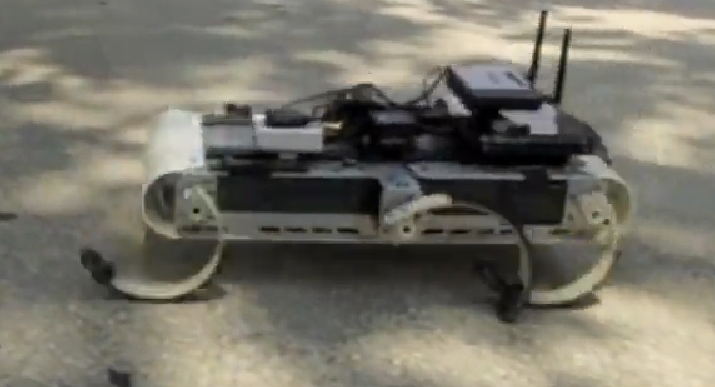
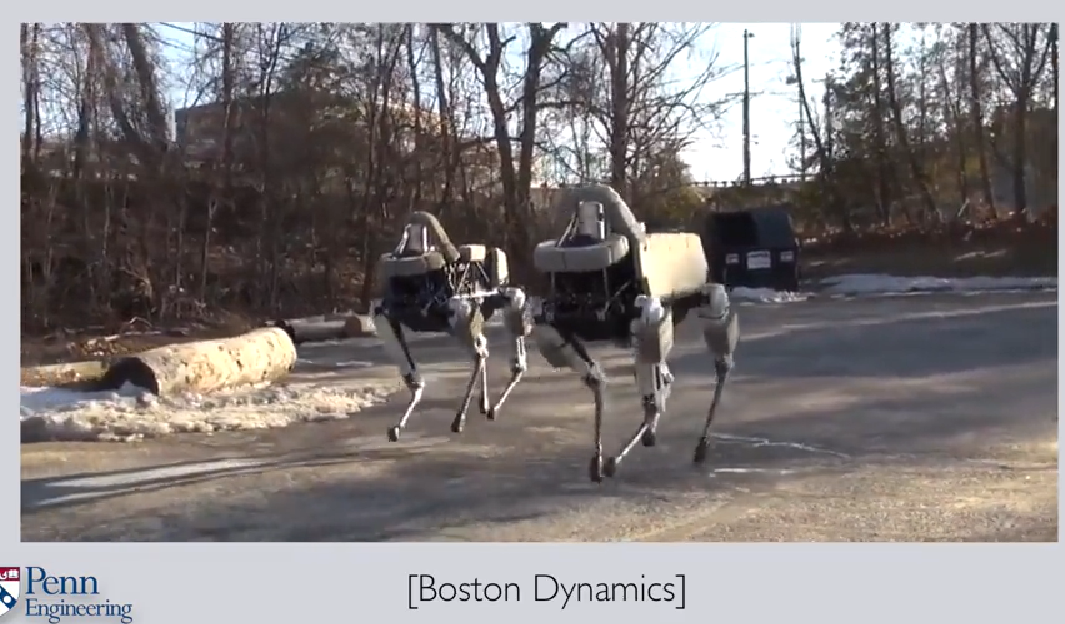
 climb-up robot
climb-up robot




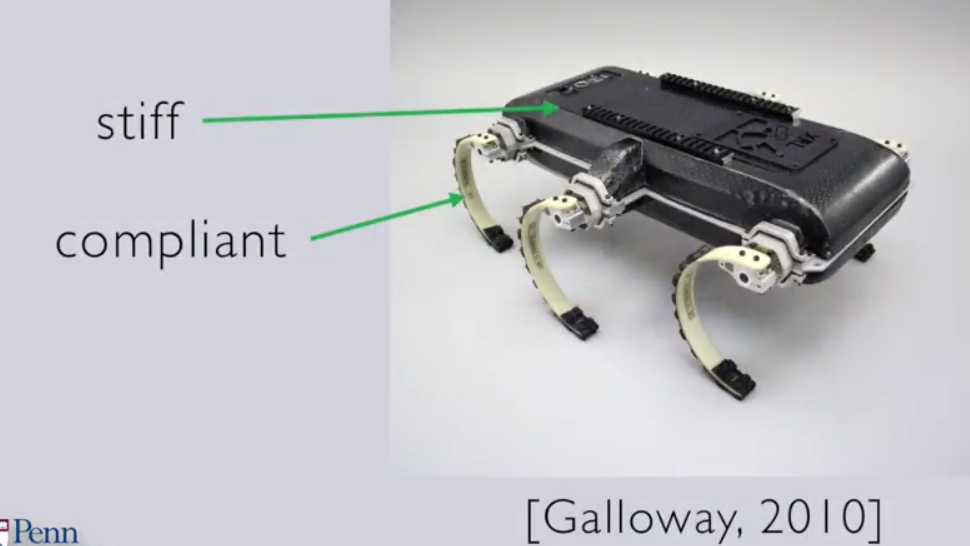

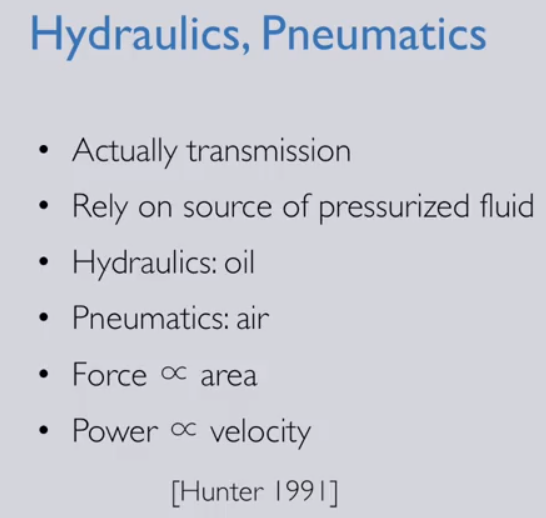
 incompressible
incompressible
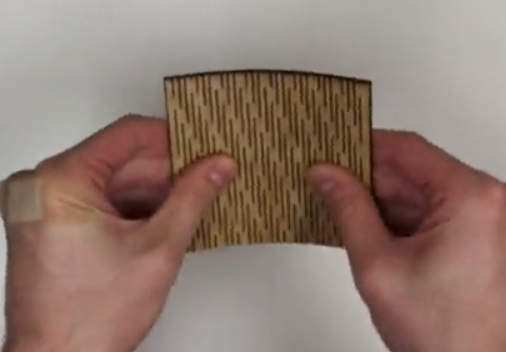
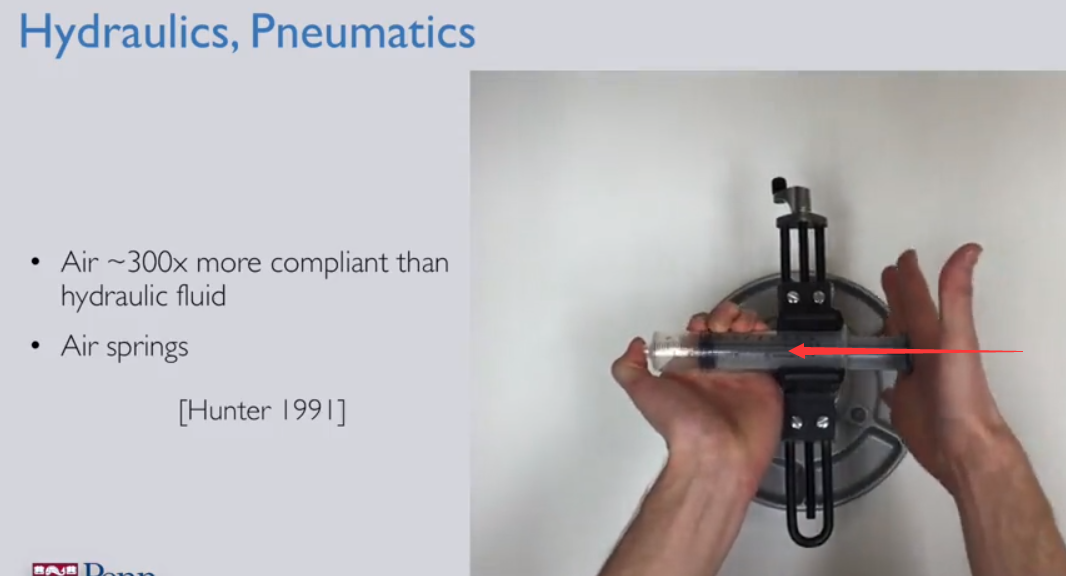 COMPRESSIBLE
COMPRESSIBLE
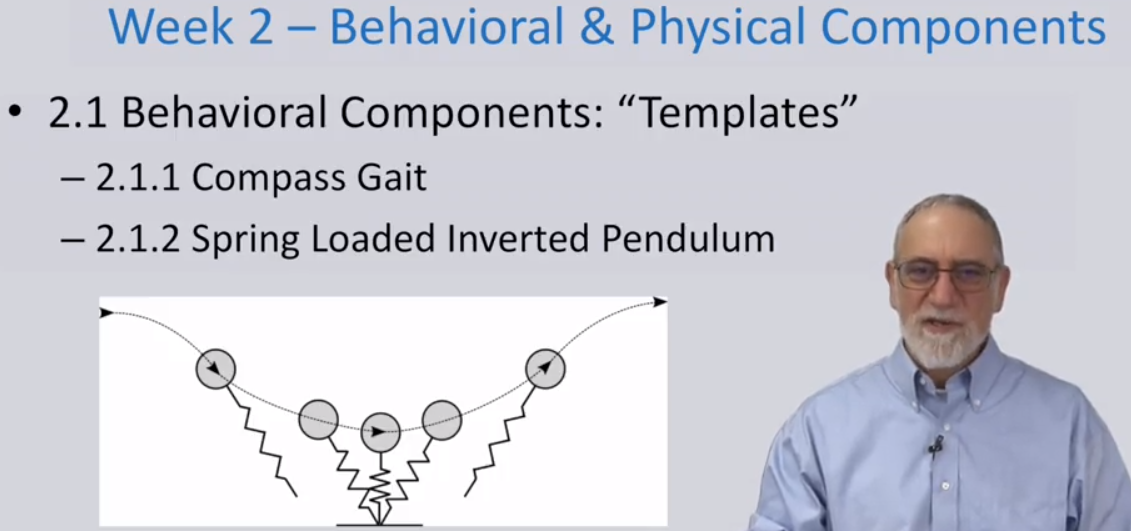
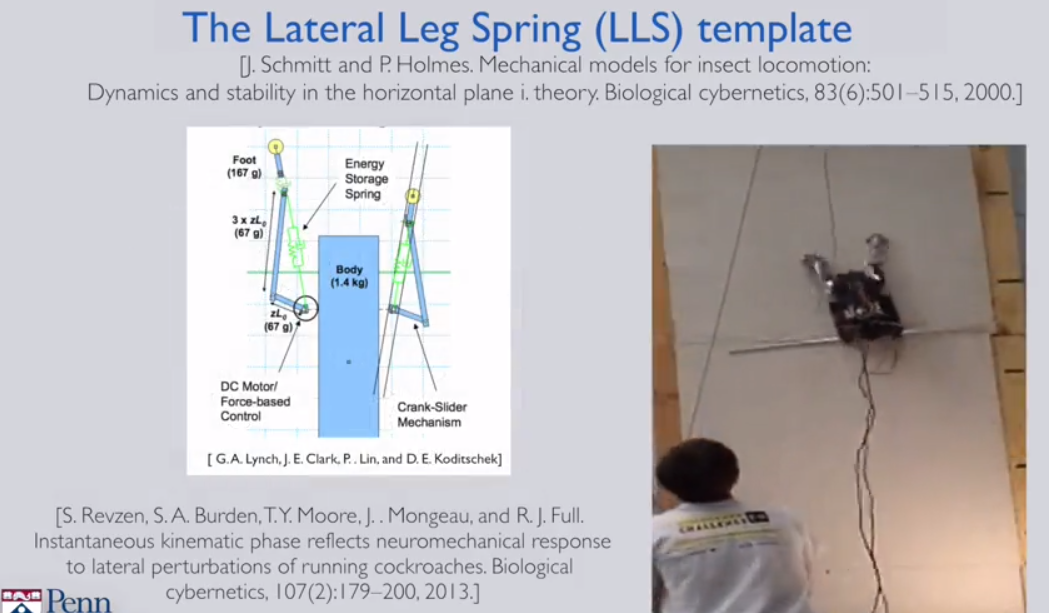
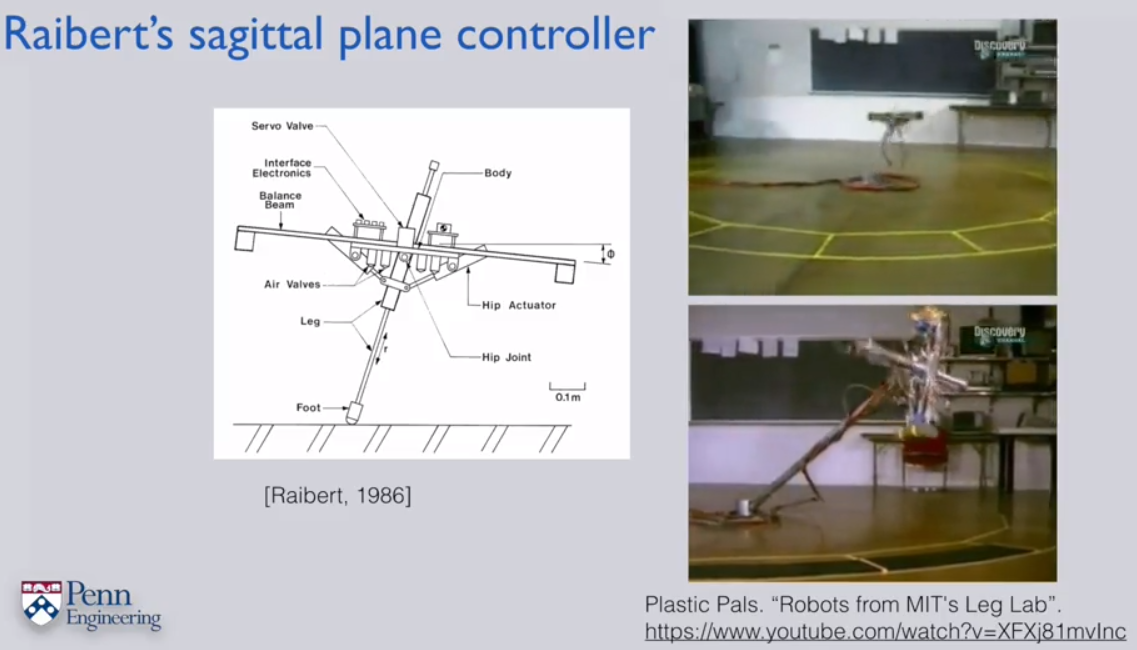
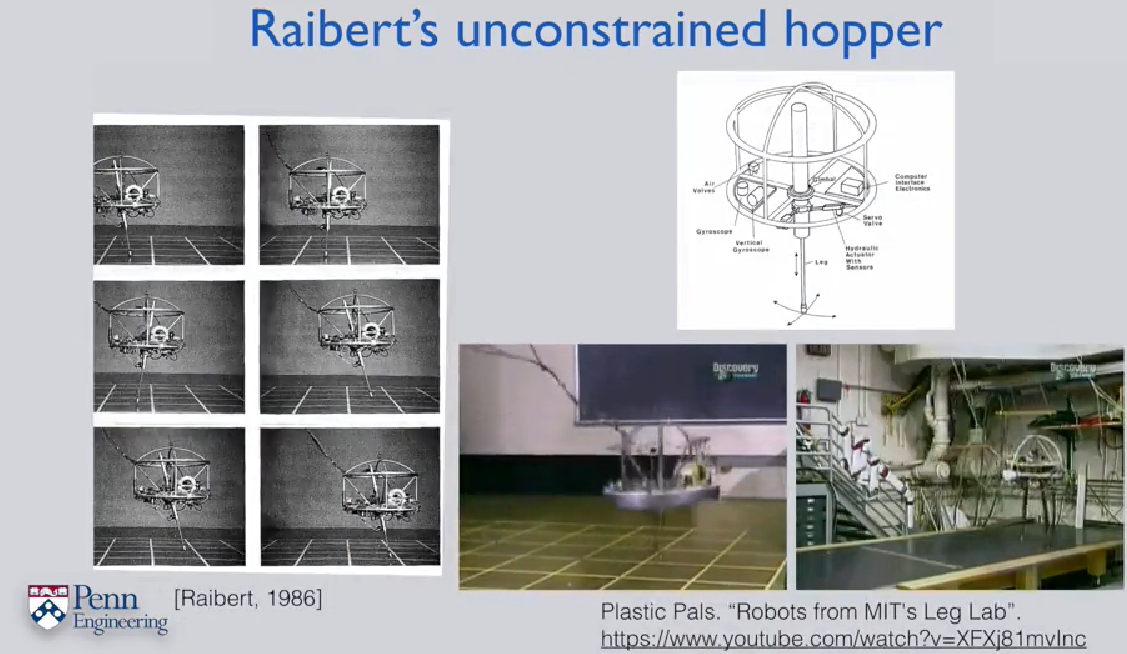
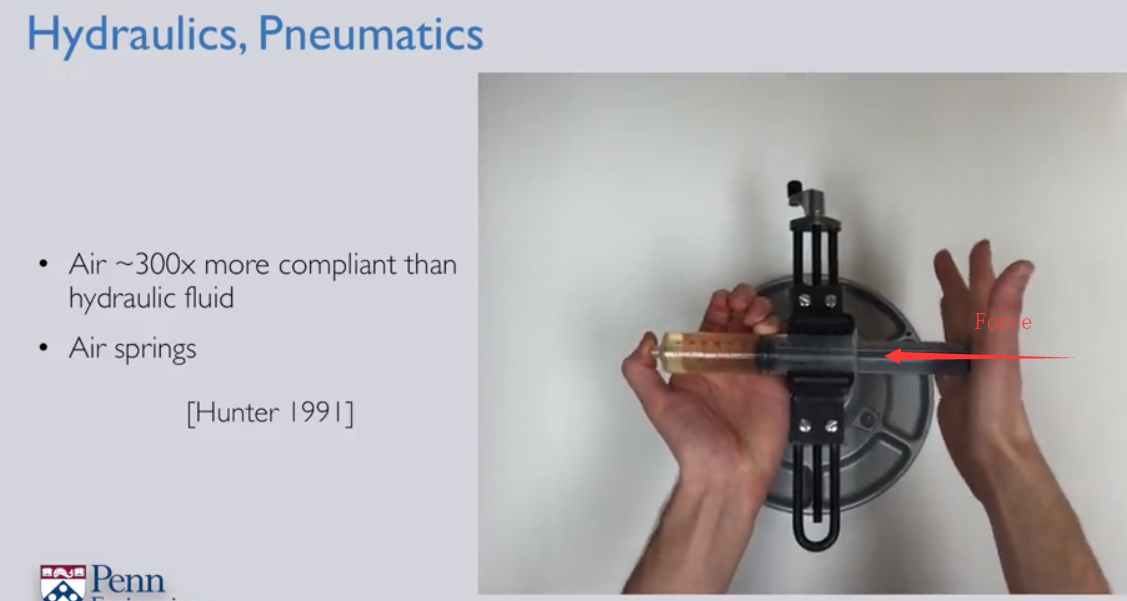
 air spring in leg
air spring in leg
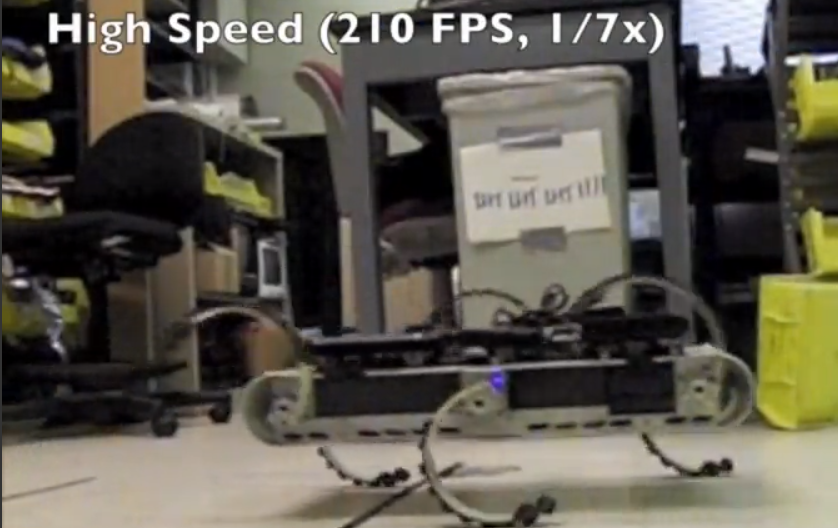
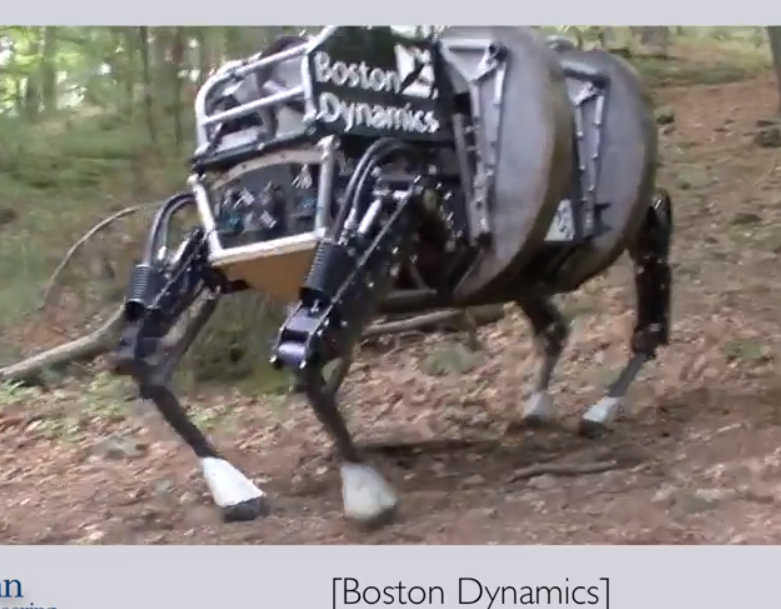 gas engine makes it very loud
gas engine makes it very loud
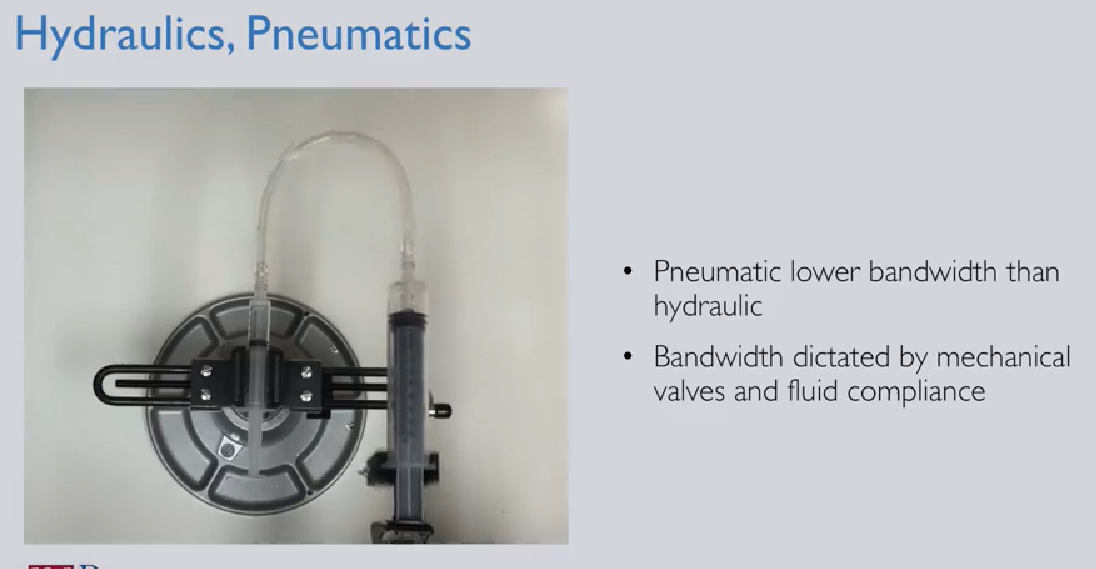
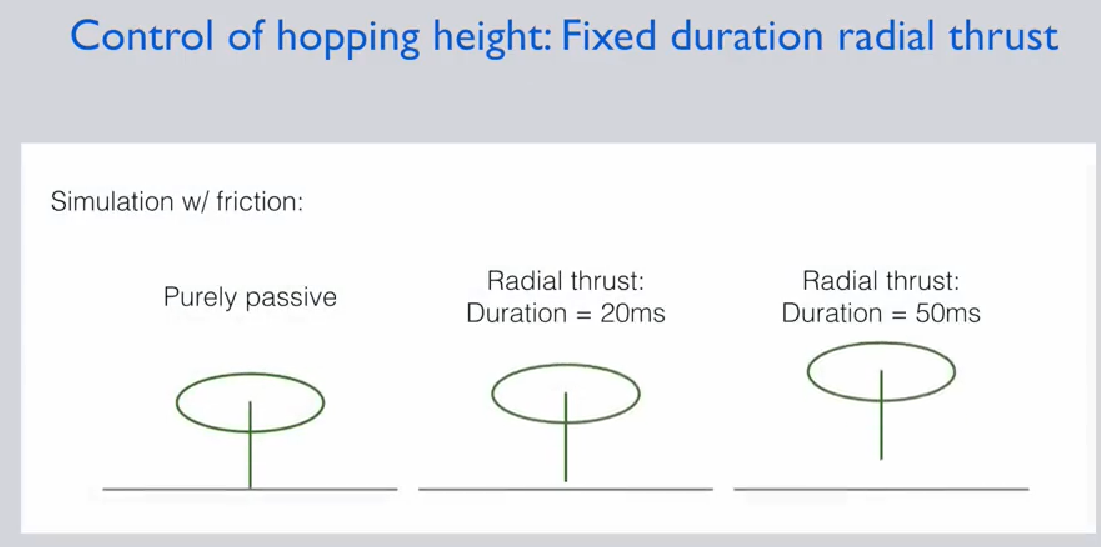
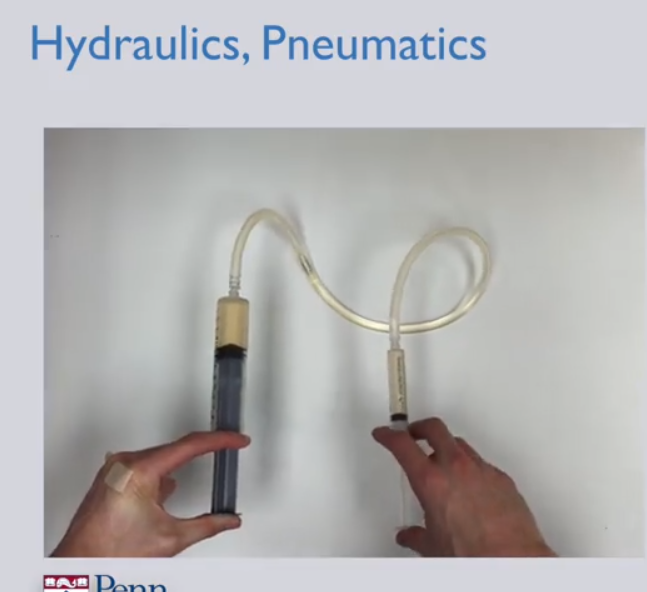
input force in large syringe, and change the input frequency: frequency increases, and output amplitude decreases tremendously!!!

oil actuator doesn;t have this amplitude reduction!!!
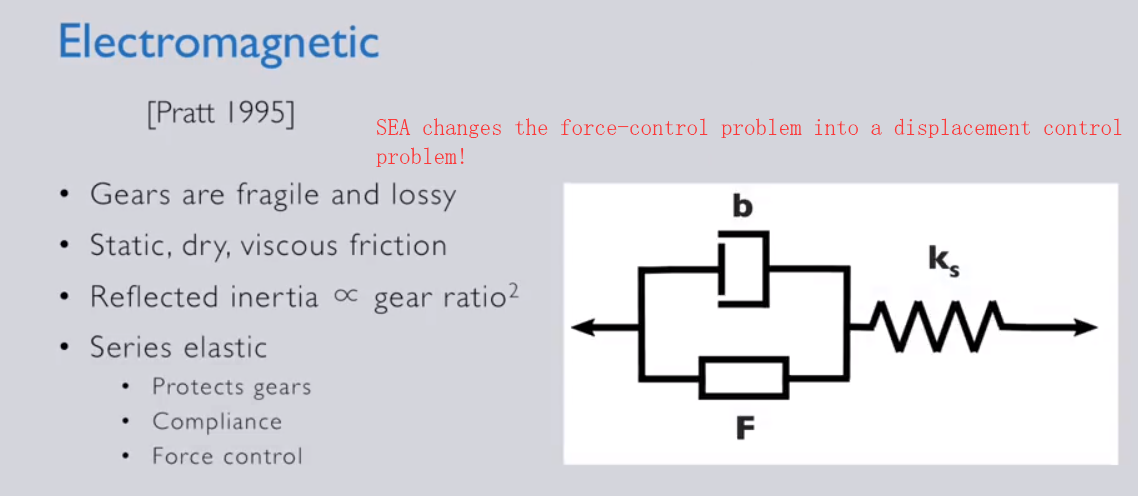
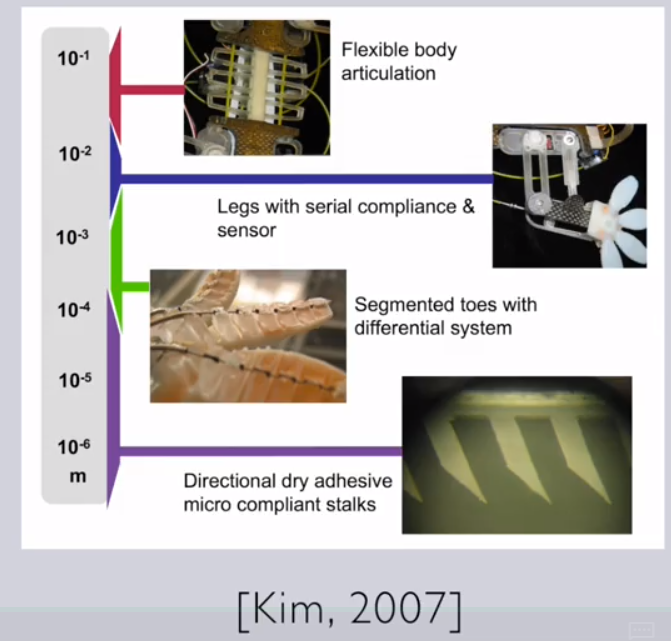
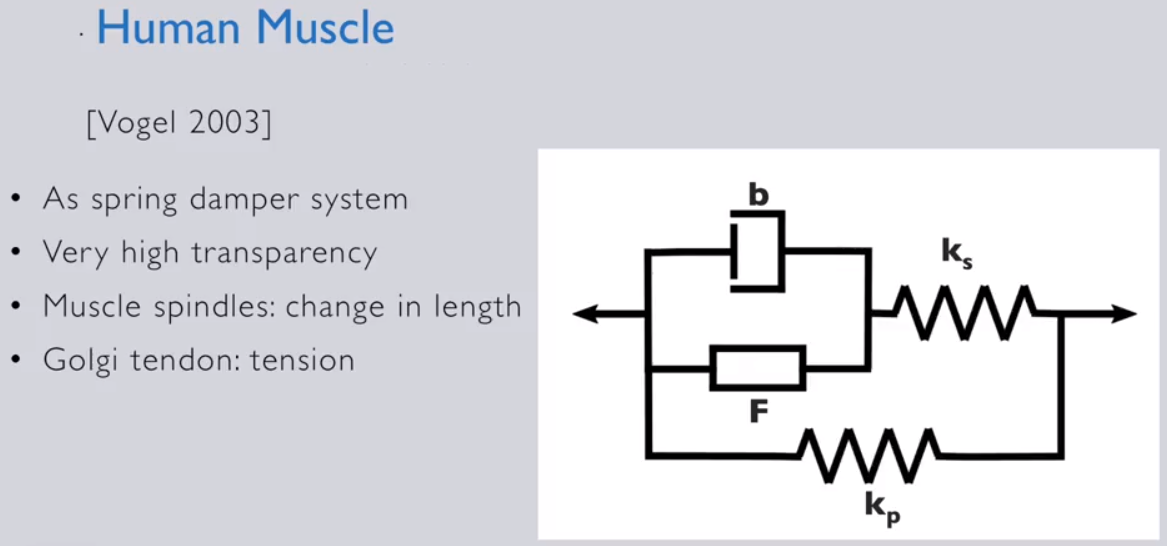
 SEA will attenuate the information! and remove the gearbox can also increase the transparency!
SEA will attenuate the information! and remove the gearbox can also increase the transparency!
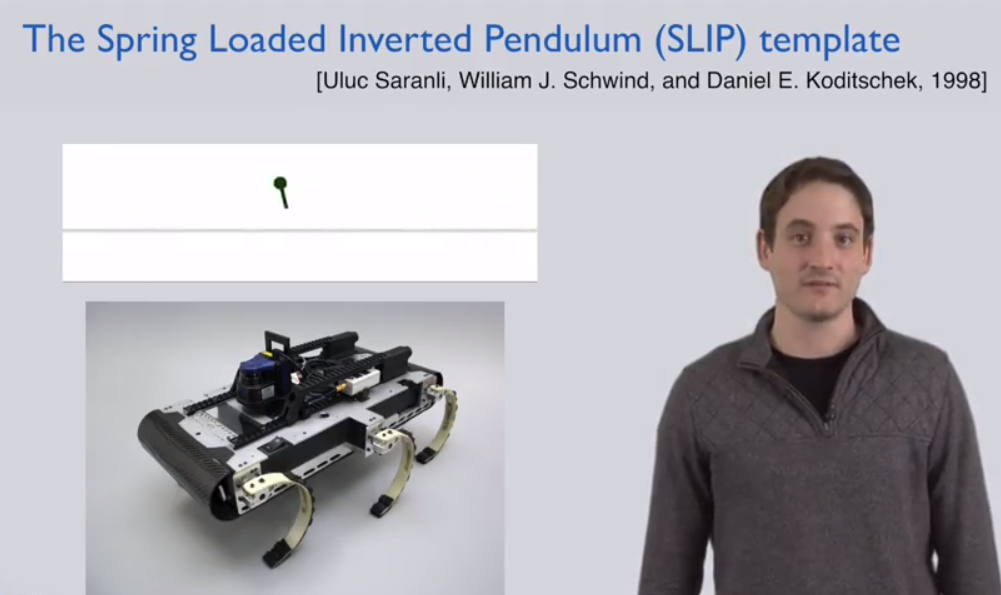
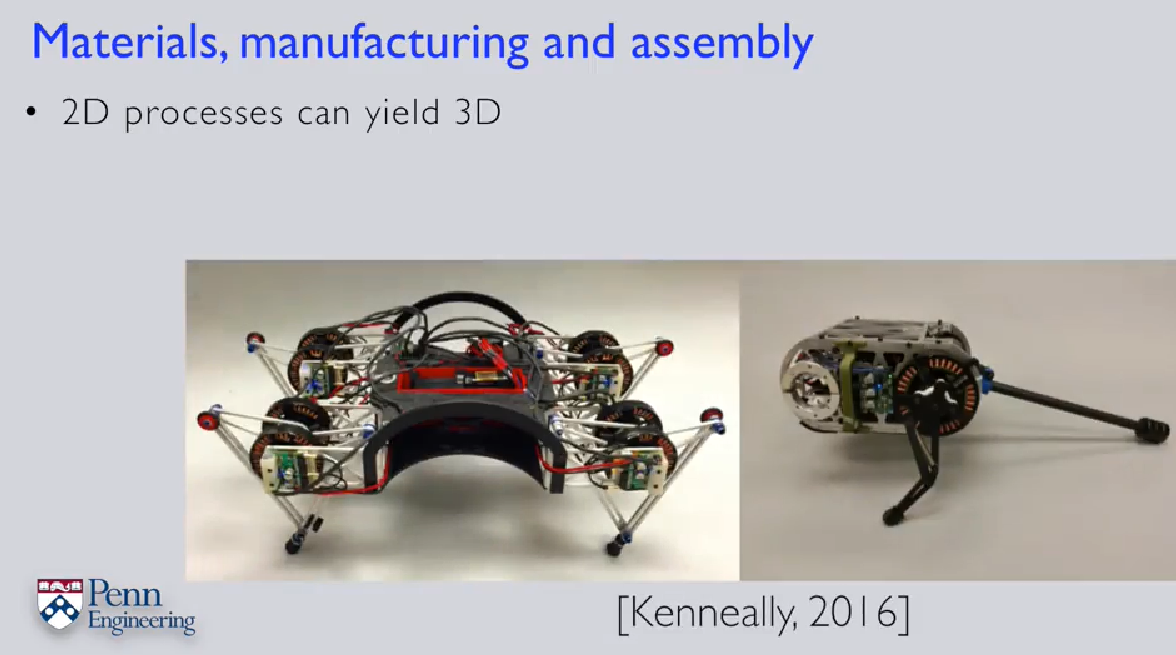
 called Minotaur
called Minotaur
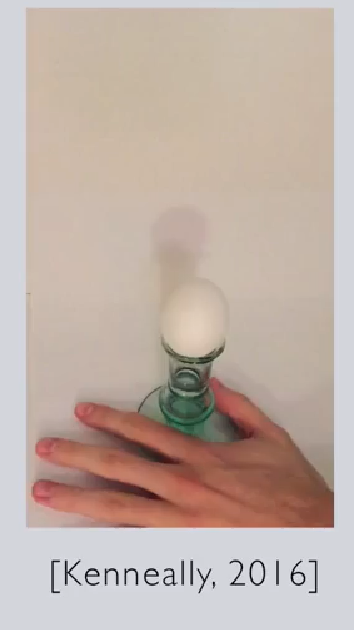
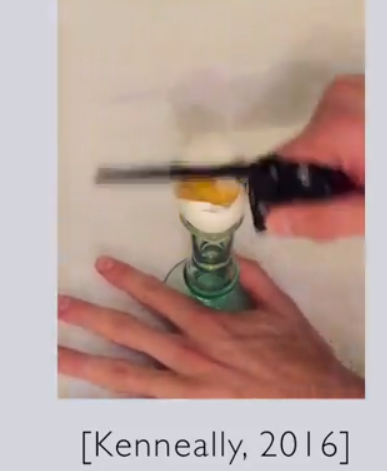
direct actuation has high transpancy, so it can sense the appearance of egg easily
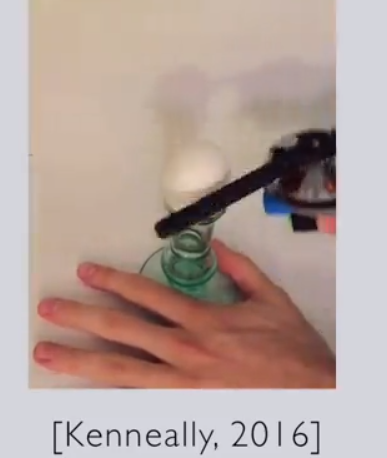
actuator with gearbox breeeeeeeeeeeaks the egg.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









