



 本文介绍了如何使用C语言封装稀疏矩阵,特别是行主元存储(CSR)格式。针对有限元方法中得到的稀疏矩阵,只存储非零元素以节省内存。文中详细解释了Value、ColI和RowI数组的作用和存储方式,并说明了矩阵加法、数乘和矩阵向量乘法等操作的实现。同时,提到了FEMatrix类作为连接有限元单元和稀疏矩阵的桥梁。
本文介绍了如何使用C语言封装稀疏矩阵,特别是行主元存储(CSR)格式。针对有限元方法中得到的稀疏矩阵,只存储非零元素以节省内存。文中详细解释了Value、ColI和RowI数组的作用和存储方式,并说明了矩阵加法、数乘和矩阵向量乘法等操作的实现。同时,提到了FEMatrix类作为连接有限元单元和稀疏矩阵的桥梁。
稀疏矩阵的封装
由有限元方法获得的单元刚度矩阵通常与单个单元相关联。这样单元矩阵与有限个单元节点相互关联,由这些单元矩阵组装成的全局矩阵就含有大量的非零元,即稀疏矩阵。为了节省存储内存,通常仅仅存储非零元的信息。稀疏矩阵的具有多种存储格式,包括行主元存储,列主元存储,坐标存储格式。
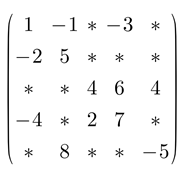
在这里封装时,仅仅对CSR格式的稀疏阵进行封装。以上图所示的稀疏矩阵为例,在存储的时候,需要一个名为Value的数组存储非零元。对于CSR格式,按照行的优先顺序进行存储,相应的Value数组内存储的内容为:

此外还需另外一个数组ColI,用于存储各个非零元所对应的列索引。对于C++,数组的索引是从零开始的,相应列索引中的存储内容为:

随后,还需要一个RowI数组存储行索引。与列索引不同,这里行索引存储RowI[0]存储的是第零行的第一个元素在Value中的索引,索引RowI[0]中存储着0; RowI[1]存储着第1行的第一个元素在Value中的索引,这样RowI[1]中存储着3。对于其他元素,相应的存储内容依此类推。并且,RowI在最终还会与一个额外的存储内容,为所有非零元素的数目。这样,最终RowI的存储内容为。

在代码中,也封装了矩阵的加法,数乘,矩阵与向量的乘法运算。
在这个代码中,还具有另外一个FEMatrix,作为联系有限元单元和稀疏矩阵存储格式的桥梁,并初始化稀疏矩阵的ColI和RowI内容,这些内容将在下一小节详细论述。
//SparseMatrix.h
#pragma once
#include"mkl.h"
#include"VECTOR.h"
#include"FEMatrix.h"
class SparseMatrix
{
public:
//稀疏矩阵所表示矩阵的行
MKL_INT Row = 0;
//稀疏矩阵所表示矩阵的列
MKL_INT Col = 0;
//稀疏矩阵的非零元素的数目
MKL_INT Nonzeros = 0;
//稀疏矩阵行索引数组
MKL_INT* RowIndex = NULL;
//稀疏矩阵的列索引数组
MKL_INT* ColIndex = NULL;
//稀疏矩阵的的压缩存储一维向量
double* Value = NULL;
////////////////////////////////////////////////////////////////////
//初始化稀疏矩阵并分配内存
void IniSP(MKL_INT row, MKL_INT col, MKL_INT nonzeros);
//由FEMatrix初始化稀疏矩阵
void IniSP(FEMatrix& fm);
/////////////////////////////////////////////////////////////////////
//获得稀疏阵的信息
//获得行数
MKL_INT GetRow();
//获得列数
MKL_INT GetCol();
//获得非零元数
MKL_INT GetNonzeros();
//获得行索引指针
MKL_INT* GetPRow();
//获得列索引指针
MKL_INT* GetPCol();
//获得非零元指针
double* GetPNonzeros();
///////////////////////////////////////////////////////////////////////
//设定sparse中的一个元素,该元素的行为row,列为column,更新为value
void SetSingleValue(MKL_INT row, MKL_INT column, double value);
//更新sparse中的一个元素,该元素的行为row,列为column,更新为value
void AddSingleValue(MKL_INT row, MKL_INT column, double value);
//获得稀疏矩阵存储区域第ii个索引的值
double GetSingleValue(MKL_INT ii);
//获得稀疏矩阵第ii行的起始索引值
MKL_INT GetRowIndex(MKL_INT ii);
//获得稀疏阵第ii个存储位置的列索引
MKL_INT GetColIndex(MKL_INT ii);
//设定稀疏矩阵存储区域第ii个索引的值为Value
void SetSingleValue(MKL_INT ii, double value);
///////////////////////////////////////////////////////////////////////
//清零稀疏阵中的所有元素
void Zeros();
//将稀疏矩阵的格式复制给另外一个矩阵
void CopyFormat(char c, SparseMatrix & sm);
//将稀疏矩阵复制给另外一个矩阵
void CopyMatrix(char c, SparseMatrix& sm);
//将稀疏矩阵加上一个稀疏阵
void AddMatrix(SparseMatrix& sm);
//将稀疏矩阵加上一个稀疏阵
void MinusMatrix(SparseMatrix& sm);
//将当前稀疏矩阵乘上一个常数
void MutiConst(double b);
//稀疏矩阵乘以矩阵并返回一个矩阵
void MutiVec(VECTOR& v, VECTOR& res);
//求解稀疏矩阵
void SolverPARDISO(VECTOR& v, VECTOR& res);
void SolverDSS(VECTOR& v, VECTOR& res);
//收回分配的内存
void Clear();
SparseMatrix();
SparseMatrix(MKL_INT row, MKL_INT col, MKL_INT nonzeros);
~SparseMatrix();
};
//SparseMatrix.cpp
#include "SparseMatrix.h"
#include <iostream>
#include"mkl.h"
#include"mkl_dss.h"
#include <fstream>
#include <cmath>
/////////////////////////////////////////////////////////////////////
//初始化稀疏矩阵并分配内存
void SparseMatrix::IniSP(MKL_INT row, MKL_INT col, MKL_INT nonzeros)
{
Clear();
Row = row;
Col = col;
Nonzeros = nonzeros;
if (RowIndex == NULL)
{
RowIndex = new MKL_INT[Row + 1];
memset(RowIndex, 0, (Row + 1) * sizeof(MKL_INT));
}
if (ColIndex == NULL)
{
ColIndex = new MKL_INT[Nonzeros];
memset(ColIndex, 0, (Nonzeros) * sizeof(MKL_INT));
}
if (Value == NULL)
{
Value = new double[Nonzeros];
memset(Value, 0, Nonzeros * sizeof(double));
}
}
//由FEMatrix初始化稀疏矩阵
void SparseMatrix::IniSP(FEMatrix& fm)
{
IniSP(fm.GetRow(), fm.GetCol(), fm.GetNonzeros());
RowIndex[0] = 0;
for (MKL_INT rowii = 0; rowii < Row; rowii++)
{
MKL_INT col_start = RowIndex[rowii];
MKL_INT row_length = fm.GetRowLength(rowii);
for (MKL_INT coljj = 0; coljj < row_length; coljj++)
{
ColIndex[col_start + coljj] = fm.GetMatrixElement(rowii, coljj);
}
RowIndex[rowii + 1] = RowIndex[rowii] + row_length;
}
}
/////////////////////////////////////////////////////////////////////
//获得稀疏阵的信息
//获得行数
MKL_INT SparseMatrix::GetRow()
{
return Row;
}
//获得列数
MKL_INT SparseMatrix::GetCol()
{
return Col;
}
//获得非零元数
MKL_INT SparseMatrix::GetNonzeros()
{
return Nonzeros;
}
//获得行索引指针
MKL_INT* SparseMatrix::GetPRow()
{
return RowIndex;
}
//获得列索引指针
MKL_INT* SparseMatrix::GetPCol()
{
return ColIndex;
}
//获得非零元指针
double* SparseMatrix::GetPNonzeros()
{
return Value;
}
///////////////////////////////////////////////////////////////////////
//设定sparse中的一个元素,该元素的行为row,列为column,更新为value
void SparseMatrix::SetSingleValue(MKL_INT row, MKL_INT column, double value)
{
MKL_INT s = 0;
MKL_INT row_loc = RowIndex[row];
MKL_INT row_length = RowIndex[row + 1] - row_loc;
for (MKL_INT ii = 0; ii < row_length; ii++)
{
s = row_loc + ii;
if (ColIndex[s] == column)
{
Value[s] = value;
return;
}
else continue;
}
std::cout.clear();
std::cout << "SparseMatrix::SetSingleValue ERROR" << std::endl;
getchar();
exit(0);
}
//更新sparse中的一个元素,该元素的行为row,列为column,更新为value
void SparseMatrix::AddSingleValue(MKL_INT row, MKL_INT column, double value)
{
MKL_INT s = 0;
MKL_INT row_loc = RowIndex[row];
MKL_INT row_length = RowIndex[row + 1] - row_loc;
for (MKL_INT ii = 0; ii < row_length; ii++)
{
s = row_loc + ii;
if (ColIndex[s] == column)
{
Value[s] += value;
return;
}
else continue;
}
std::cout.clear();
std::cout << "SparseMatrix::SetSingleValue ERROR" << std::endl;
getchar();
exit(0);
}
//获得稀疏矩阵存储区域第ii个索引的值
double SparseMatrix::GetSingleValue(MKL_INT ii)
{
if (ii < Nonzeros)
return Value[ii];
else
{
std::cout.clear();
std::cout << "SparseMatrix::GetSingleVale ERROR" << std::endl;
getchar();
exit(0);
}
}
//赋予稀疏矩阵存储区域第ii个索引的值为value
void SparseMatrix::SetSingleValue(MKL_INT ii, double value)
{
if (ii < Nonzeros)
Value[ii] = value;
else
{
std::cout.clear();
std::cout << "SparseMatrix::GetSingleVale ERROR" << std::endl;
getchar();
exit(0);
}
}
//获得稀疏矩阵第ii行的起始索引值
MKL_INT SparseMatrix::GetRowIndex(MKL_INT ii)
{
if (ii <= Row)
return RowIndex[ii];
else
{
std::cout.clear();
std::cout << "SparseMatrix::GetRowIndex ERROR" << std::endl;
getchar();
exit(0);
}
}
//获得稀疏阵第ii个存储位置的列索引
MKL_INT SparseMatrix::GetColIndex(MKL_INT ii)
{
return ColIndex[ii];
}
//清零稀疏阵中的所有元素
void SparseMatrix::Zeros()
{
memset(Value, 0, Nonzeros * sizeof(double));
}
//将稀疏矩阵的格式复制给另外一个矩阵
void SparseMatrix::CopyFormat(char c, SparseMatrix& sm)
{
if (c == '<')
{
IniSP(sm.GetRow(), sm.GetCol(), sm.GetNonzeros());
memcpy(ColIndex, sm.GetPCol(), Nonzeros * sizeof(MKL_INT));
memcpy(RowIndex, sm.GetPRow(), (Row + 1) * sizeof(MKL_INT));
Zeros();
}
else if (c == '>')
{
sm.IniSP(Row, Col, Nonzeros);
memcpy(sm.GetPCol(), ColIndex, Nonzeros * sizeof(MKL_INT));
memcpy(sm.GetPRow(), RowIndex, (Row + 1) * sizeof(MKL_INT));
sm.Zeros();
}
else
{
std::cout.clear();
std::cout << "SparseMatrix::CopyFormat ERROR" << std::endl;
getchar();
exit(0);
}
}
//将稀疏矩阵复制给另外一个矩阵
void SparseMatrix::CopyMatrix(char c, SparseMatrix& sm)
{
if (c == '<')
{
CopyFormat('<', sm);
memcpy(Value, sm.GetPNonzeros(), Nonzeros * sizeof(double));
}
else if (c == '>')
{
CopyFormat('>', sm);
memcpy(sm.GetPNonzeros(), Value, Nonzeros * sizeof(double));
}
else
{
std::cout.clear();
std::cout << "SparseMatrix::CopyMatrix ERROR" << std::endl;
getchar();
exit(0);
}
}
//将稀疏矩阵加上一个稀疏阵
void SparseMatrix::AddMatrix(SparseMatrix& sm)
{
if ((sm.GetRow() == Row) && (sm.GetCol() == Col) && sm.GetNonzeros() == Nonzeros)
{
cblas_daxpy(Nonzeros, 1.0, sm.GetPNonzeros(), 1, Value, 1);
}
else
{
std::cout.clear();
std::cout << "SparseMatrix::AddMatrix ERROR" << std::endl;
getchar();
exit(0);
}
}
//将稀疏矩阵减去一个稀疏阵
void SparseMatrix::MinusMatrix(SparseMatrix& sm)
{
if ((sm.GetRow() == Row) && (sm.GetCol() == Col) && sm.GetNonzeros() == Nonzeros)
{
cblas_daxpy(Nonzeros, -1.0, sm.GetPNonzeros(), 1, Value, 1);
}
else
{
std::cout.clear();
std::cout << "SparseMatrix::AddMatrix ERROR" << std::endl;
getchar();
exit(0);
}
}
//将当前稀疏矩阵乘上一个常数
void SparseMatrix::MutiConst(double b)
{
cblas_dscal(Nonzeros, b, Value, 1);
}
//稀疏矩阵乘以矩阵并返回一个矩阵
void SparseMatrix::MutiVec(VECTOR& v, VECTOR& res)
{
if (Col == v.GetVecDim())
{
VECTOR nv;
nv.InitVec(Row);
// Descriptor of main sparse matrix properties
struct matrix_descr descrA;
// // Structure with sparse matrix stored in CSR format
sparse_matrix_t csrA;
// Create handle with matrix stored in CSR format
mkl_sparse_d_create_csr(&csrA, SPARSE_INDEX_BASE_ZERO,
Row, // number of rows
Col, // number of cols
RowIndex,
RowIndex + 1,
ColIndex,
Value);
// Create matrix descriptor
descrA.type = SPARSE_MATRIX_TYPE_GENERAL;
// Analyze sparse matrix; choose proper kernels and workload balancing strategy
mkl_sparse_optimize(csrA);
// Compute y = alpha * A * x + beta * y
mkl_sparse_d_mv(SPARSE_OPERATION_NON_TRANSPOSE,
1.0,
csrA,
descrA,
v.GetVecP(),
0,
nv.GetVecP());
// Release matrix handle and deallocate matrix
mkl_sparse_destroy(csrA);
res.Clear();
res.InitVec(nv.GetVecDim());
res.CopyVec('<', nv);
nv.Clear();
}
else
{
std::cout.clear();
std::cout << "SparseMatrix::MutiVec ERROR" << std::endl;
getchar();
exit(0);
}
}
//求解稀疏矩阵
void SparseMatrix::SolverPARDISO(VECTOR& v, VECTOR& res)
{
MKL_INT mtype = 11; /* Real unsymmetric matrix */
/* RHS and solution vectors. */
MKL_INT nrhs = 1; /* Number of right hand sides. */
/* Internal solver memory pointer pt, */
/* 32-bit: int pt[64]; 64-bit: long int pt[64] */
/* or void *pt[64] should be OK on both architectures */
void* pt[64];
/* Pardiso control parameters. */
MKL_INT iparm[64];
MKL_INT maxfct, mnum, phase, error, msglvl;
/* Auxiliary variables. */
MKL_INT idum; /* Integer dummy. */
/* -------------------------------------------------------------------- */
/* .. Setup Pardiso control parameters. */
/* -------------------------------------------------------------------- */
memset(iparm, 0, 64 * sizeof(MKL_INT));
iparm[0] = 1; /* No solver default */
iparm[1] = 2; /* Fill-in reordering from METIS */
iparm[3] = 0; /* No iterative-direct algorithm */
iparm[4] = 0; /* No user fill-in reducing permutation */
iparm[5] = 0; /* Write solution into x */
iparm[6] = 0; /* Not in use */
iparm[7] = 5; /* Max numbers of iterative refinement steps */
iparm[8] = 0; /* Not in use */
iparm[9] = 13; /* Perturb the pivot elements with 1E-13 */
iparm[10] = 1; /* Use nonsymmetric permutation and scaling MPS */
iparm[11] = 0; /* Conjugate transposed/transpose solve */
iparm[12] = 1; /* Maximum weighted matching algorithm is switched-on (default for non-symmetric) */
iparm[13] = 0; /* Output: Number of perturbed pivots */
iparm[14] = 0; /* Not in use */
iparm[15] = 0; /* Not in use */
iparm[16] = 0; /* Not in use */
iparm[17] = -1; /* Output: Number of nonzeros in the factor LU */
iparm[18] = -1; /* Output: Mflops for LU factorization */
iparm[19] = 0; /* Output: Numbers of CG Iterations */
iparm[34] = 1; //Zero based
maxfct = 1; /* Maximum number of numerical factorizations. */
mnum = 1; /* Which factorization to use. */
msglvl = 0; /* Print statistical information */
error = 0; /* Initialize error flag */
/* -------------------------------------------------------------------- */
/* .. Initialize the internal solver memory pointer. This is only */
/* necessary for the FIRST call of the PARDISO solver. */
/* -------------------------------------------------------------------- */
memset(pt, 0, 64 * sizeof(void*));
/* -------------------------------------------------------------------- */
/* .. Reordering and Symbolic Factorization. This step also allocates */
/* all memory that is necessary for the factorization. */
/* -------------------------------------------------------------------- */
phase = 11;
double ddum;
PARDISO(pt, &maxfct, &mnum, &mtype, &phase,
&(this->Row), this->Value, this->RowIndex, this->ColIndex, &idum, &nrhs, iparm, &msglvl, &ddum, &ddum, &error);
//if (error != 0)
//{
// printf("nERROR during symbolic factorization: %d", error);
// exit(1);
//}
//printf("nReordering completed ... ");
//printf("nNumber of nonzeros in factors = %d", iparm[17]);
//printf("nNumber of factorization MFLOPS = %d", iparm[18]);
/* -------------------------------------------------------------------- */
/* .. Numerical factorization. */
/* -------------------------------------------------------------------- */
phase = 22;
PARDISO(pt, &maxfct, &mnum, &mtype, &phase,
&(this->Row), this->Value, this->RowIndex, this->ColIndex, &idum, &nrhs, iparm, &msglvl, &ddum, &ddum, &error);
if (error != 0)
{
printf("nERROR during numerical factorization: %d", error);
exit(2);
}
/* -------------------------------------------------------------------- */
/* .. Back substitution and iterative refinement. */
/* -------------------------------------------------------------------- */
phase = 33;
// solving steps: Ax=b
iparm[11] = 0; /* Conjugate transposed/transpose solve */
//printf("nnSolving system with iparm[11] = %d ...n", (int)iparm[11]);
PARDISO(pt, &maxfct, &mnum, &mtype, &phase,
&(this->Row), this->Value, this->RowIndex, this->ColIndex, &idum, &nrhs, iparm, &msglvl, v.GetVecP(), res.GetVecP(), &error);
/* -------------------------------------------------------------------- */
/* .. Termination and release of memory. */
/* -------------------------------------------------------------------- */
phase = -1; /* Release internal memory. */
PARDISO(pt, &maxfct, &mnum, &mtype, &phase,
&(this->Row), &ddum, this->RowIndex, this->ColIndex, &idum, &nrhs,
iparm, &msglvl, &ddum, &ddum, &error);
return;
}
void SparseMatrix::SolverDSS(VECTOR& v, VECTOR& res)
{
/* Allocate storage for the solver handle and the right-hand side. */
MKL_INT nRhs = 1;
_MKL_DSS_HANDLE_t handle;
_INTEGER_t error;
_DOUBLE_PRECISION_t statOut[5], eps = 1e-6;
MKL_INT opt = MKL_DSS_DEFAULTS;
opt = opt + MKL_DSS_ZERO_BASED_INDEXING;
MKL_INT opt1;
MKL_INT sym = MKL_DSS_NON_SYMMETRIC;
MKL_INT type = MKL_DSS_INDEFINITE;
/* --------------------- */
/* Initialize the solver */
/* --------------------- */
error = dss_create(handle, opt);
/* ------------------------------------------- */
/* Define the non-zero structure of the matrix */
/* ------------------------------------------- */
error = dss_define_structure(handle, sym, RowIndex, Row, Col, ColIndex, Nonzeros);
/* ------------------ */
/* Reorder the matrix */
/* ------------------ */
//error = dss_reorder(handle, opt, 0);
opt1 = MKL_DSS_AUTO_ORDER;
error = dss_reorder(handle, opt1, 0);
/* ------------------ */
/* Factor the matrix */
/* ------------------ */
error = dss_factor_real(handle, type, Value);
/* ------------------------ */
/* Get the solution vector for Ax=b and ATx=b and check correctness */
/* ------------------------ */
// Apply trans or non-trans option, solve system
opt = MKL_DSS_DEFAULTS;
error = dss_solve_real(handle, opt, v.GetVecP(), nRhs, res.GetVecP());
/* -------------------------- */
/* Deallocate solver storage */
/* -------------------------- */
opt = MKL_DSS_MSG_LVL_WARNING + MKL_DSS_TERM_LVL_ERROR;
error = dss_delete(handle, opt);
}
//////////////////////////////////////////////////////////////////////
//收回分配的内存
//构造与析构函数
void SparseMatrix::Clear()
{
Row = 0;
Col = 0;
Nonzeros = 0;
if (ColIndex != NULL)
{
delete[] ColIndex;
ColIndex = NULL;
}
if (RowIndex != NULL)
{
delete[] RowIndex;
RowIndex = NULL;
}
if (Value != NULL)
{
delete[] Value;
Value = NULL;
}
}
SparseMatrix::SparseMatrix(MKL_INT row, MKL_INT col, MKL_INT nonzeros)
{
Clear();
IniSP(row, col, nonzeros);
}
SparseMatrix::SparseMatrix()
{
}
SparseMatrix::~SparseMatrix()
{
Clear();
}

















 3615
3615

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









