






有些用户,想用win10的同时,又想用win7,所以需要安装双系统。这篇文章就是白云一键重装系统给这类用户带来的方法教程,其实原理很简单,同一块硬盘,可以分成多个分区,然后再在上面分别安装系统即可。
注:相同的一块硬盘下,安装两个或多个系统需要把不同的系统安装在不同的分区,然后安装工具一键自动会修复,但有些工具不支持一键修复,这里推荐USM启动U盘,支持双系统自动修复,同时支持MBR/GPT一键自动修复。
一、安装前的准备工作
1、白云系统(可以两个都是win7,也可以两个都是win10,又或者一个win7一个win10也可以)和白云一键重装系统工具
2、支持USB3.0/USB3.1和显卡驱动的驱动总裁下载(全面支持B360/B365/Z390/H370/Z370等主板USB驱动以及UDH620/630/P630集显驱动)
3、同时我们还需要准备一个USM启动U盘(工具特点:1、支持PE下自动修复UEFI+GPT引导,2、支持LEGACY/UEFI双引导,3、一键装机自动注入USB3.0和nvme固态硬盘驱动,4、绝无捆绑任何软件的启动盘),并把需要安装的系统放到U盘里。还有特别需要注意的地方是:一定要备份好重要的数据才进行操作,要不然丢失数据就会很麻烦。
二、在一台电脑上同时重装两个系统的方法步骤(文章举例用到的是戴尔电脑)
1、插入已经制作好的USM启动U盘,开机或重启电脑的时候,也就是在出现Logo的时候,连续按F12(如果按键不对,那大家可以百度查一下),可以快速打开引导菜单,然后回车选择已经识别到的U盘;

2、选择U盘启动进入PE后,运行桌面的SGI工具,按照界面提示,一步步操作,首先点击浏览,在U盘找到我们下载好的win7 ghost版本的iso或者gho文件,以C盘为系统盘,把win7系统安装在C盘中,最后点击确定开始安装;
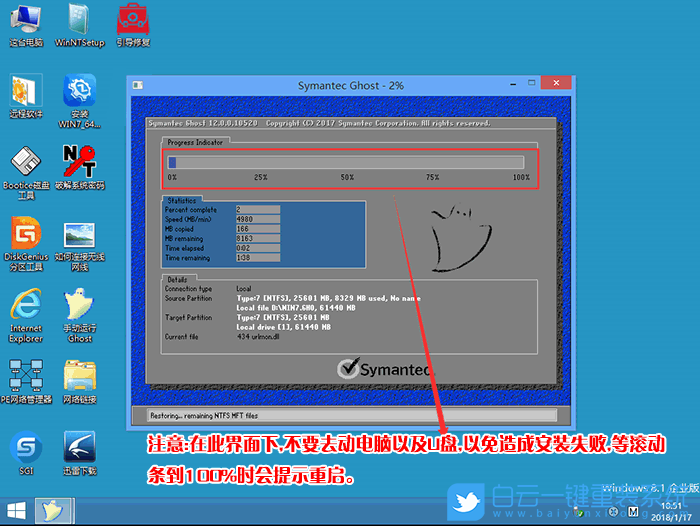
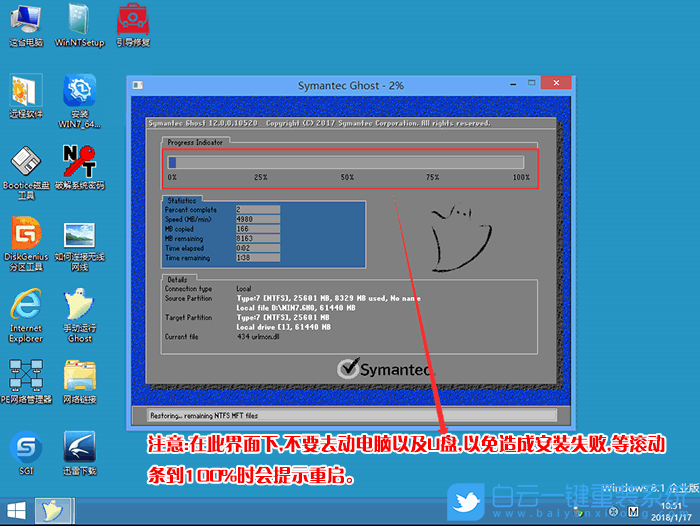
3、点击开始安装后,Symantec Ghost 会执行,需要注意的是,在这个界面下,不要去动电脑以及U盘,以免造成安装失败,等进度条到100%时会自动重启的;
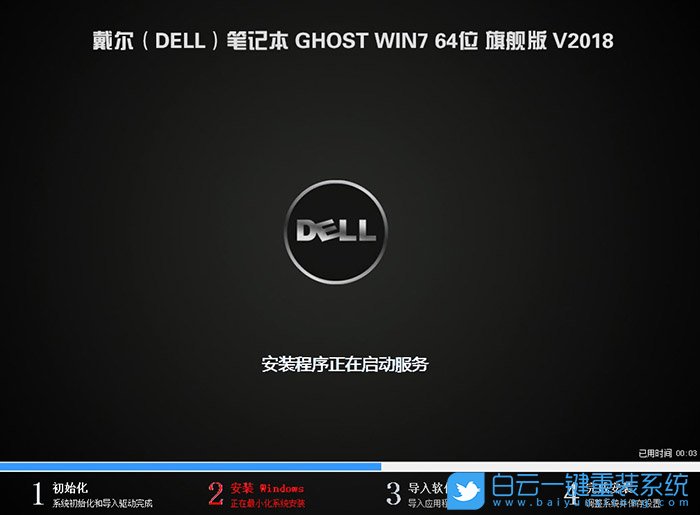
4、电脑重启后就可以拔下U盘,这个时候系统会自动执行刚才还没有完成的安装程序,耐心等待安装完成后,进入到桌面,说明win7系统已经成功安装,这样win7系统就安装完成了,接下来安装win10系统。安装下一个系统还是要用U盘安装;
5、再次插入已经制作好的USM启动U盘,开机或重启电脑的时候,也就是在出现Logo的时候,连续按F12(如果按键不对,那大家可以百度查一下),可以快速打开引导菜单,然后回车选择已经识别到的U盘;
6、选择U盘启动进入PE后,运行桌面的SGI工具,按照界面提示,一步步操作,首先点击浏览,在U盘找到我们下载好的win10 ghost版本的iso或者gho文件,由于刚才第一个安装的win7系统已经在C盘,所以不能再安装在C盘,只能换别的盘,这里可以选择D盘,然后进行安装;
7、点击开始安装后,等待释放GHO安装程序,电脑便会自动修复win7+win10两个系统引导,然后会自动重启电脑;
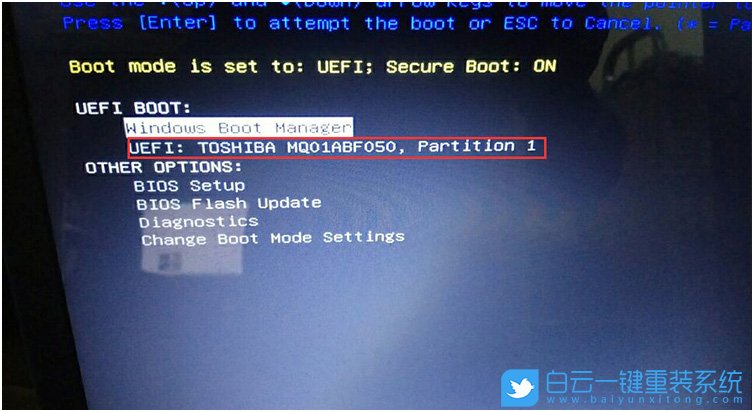
8、重启电脑的时候,可以拔掉U盘,可以看到Windows 启动管理器,提示win7和win10两个系统菜单,回车选择win10系统后,会自动执行刚才还没有完成的安装程序;
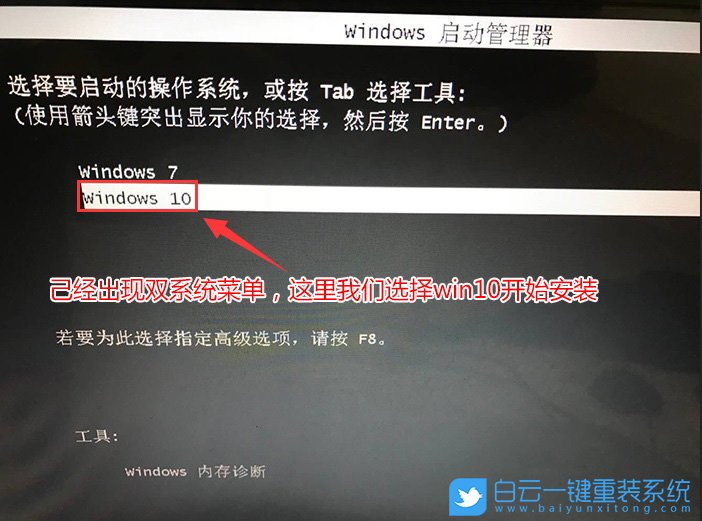
9、选择win10系统菜单后,这个时候,我们只需要耐心等待安装完成,进入桌面。安装完win10后,每次开机我们可以根据自己的双系统选择要使用的系统启动即可。

以上就是如何在一台电脑上同时重装两个系统|戴尔电脑怎么安装两个系统文章,目前驱动总裁已经全面支持B360/B365/Z390/H370等主板USB驱动以及UDH620/630/P630集显驱动,大家有需要的可以下载使用。如果这篇文章的方法能帮到你,那就收藏白云一键重装系统网站,在这里会不定期给大家分享常用装机故障解决方法。

















 13万+
13万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









