/* USER CODE BEGIN Header */
/**
******************************************************************************
* File Name : freertos.c
* Description : Code for freertos applications
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "usart.h"
int fputc(int ch,FILE *f)
{
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,HAL_MAX_DELAY);
return ch;
}
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
/* USER CODE END Variables */
osThreadId defaultTaskHandle;
osThreadId LED_TaskHandle;
osThreadId CMDprocess_TaskHandle;
osSemaphoreId BinarySemHandle;
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
/* USER CODE END FunctionPrototypes */
void StartDefaultTask(void const * argument);
void LEDTask(void const * argument);
void CMDprocessTask(void const * argument);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/* GetIdleTaskMemory prototype (linked to static allocation support) */
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize );
/* USER CODE BEGIN GET_IDLE_TASK_MEMORY */
static StaticTask_t xIdleTaskTCBBuffer;
static StackType_t xIdleStack[configMINIMAL_STACK_SIZE];
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize )
{
*ppxIdleTaskTCBBuffer = &xIdleTaskTCBBuffer;
*ppxIdleTaskStackBuffer = &xIdleStack[0];
*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
/* place for user code */
}
/* USER CODE END GET_IDLE_TASK_MEMORY */
/**
* @brief FreeRTOS initialization
* @param None
* @retval None
*/
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* Create the semaphores(s) */
/* definition and creation of BinarySem */
osSemaphoreDef(BinarySem);
BinarySemHandle = osSemaphoreCreate(osSemaphore(BinarySem), 1);
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* definition and creation of defaultTask */
osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128);
defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL);
/* definition and creation of LED_Task */
osThreadDef(LED_Task, LEDTask, osPriorityNormal, 0, 128);
LED_TaskHandle = osThreadCreate(osThread(LED_Task), NULL);
/* definition and creation of CMDprocess_Task */
osThreadDef(CMDprocess_Task, CMDprocessTask, osPriorityNormal, 0, 128);
CMDprocess_TaskHandle = osThreadCreate(osThread(CMDprocess_Task), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
}
/* USER CODE BEGIN Header_StartDefaultTask */
/**
* @brief Function implementing the defaultTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
for(;;)
{
osDelay(1);
}
/* USER CODE END StartDefaultTask */
}
/* USER CODE BEGIN Header_LEDTask */
/**
* @brief Function implementing the LED_Task thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_LEDTask */
void LEDTask(void const * argument)
{
/* USER CODE BEGIN LEDTask */
/* Infinite loop */
for(;;)
{
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_0);
osDelay(500);
}
/* USER CODE END LEDTask */
}
/* USER CODE BEGIN Header_CMDprocessTask */
/**
* @brief Function implementing the CMDprocess_Task thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_CMDprocessTask */
void CMDprocessTask(void const * argument)
{
/* USER CODE BEGIN CMDprocessTask */
BaseType_t err = pdFALSE;
/* Infinite loop */
for(;;)
{
if(BinarySemHandle !=0)
{
err = xSemaphoreTake(BinarySemHandle,portMAX_DELAY);
if(err == pdPASS)
{
printf("CMDprocessTask take the binary Semphore!\r\n");
printf("received CMD is:");
for (int i =0;i<8;i++)
printf ("%c",RxBuff[i]);
printf ("\n");
if(strncmp((char *)Rxbuff,"LED2on",6) == 0)
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_0|GPIO_PIN_1,GPIO_PIN_RESET);
else if(strncmp((char *)RxBuff,"LED2off",7) == 0)
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_0|GPIO_PIN_1,GPIO_PIN_SET);
else if(strncmp((char *)RxBuff,"LED3on",6) == 0)
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2|GPIO_PIN_3,GPIO_PIN_RESET);
else if(strncmp((char *)RxBuff,"LED3off",7) == 0)
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2|GPIO_PIN_3,GPIO_PIN_SET);
else if(strncmp((char *)RxBuff,"BUZZon",6) == 0)
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_SET);
else if(strncmp((char *)RxBuff,"BUZZoff",7) == 0)
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_RESET);
else
printf("invalid CMD,piease input LED2on LED2off BUFFon or BUFFoff\r\n");
}
else
vTaskDelay(10);
}
osDelay(1);
}
/* USER CODE END CMDprocessTask */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
RxBuff[Rx_Count++]=RxByte;
if((RxByte==0x0A)&&(BinarySemHandle!=0))
{
xSemaphoreGiveFromISR(BinarySemHandle,NULL);
print("Semaphore Give FromISR succesed!\r\n");
Rx_Count=0;
}
if(Rx_Count > 8)
{
print("Wrong CMD,Please Check...!\r\n");
memset(RxBuff,0,sizeof(RxBuff));
Rx_Count=0;
}
while(HAL_UART_Receive_IT(&huart1,&RxByte, 1)==HAL_OK);
}
/* USER CODE END Application */
中报错/* USER CODE BEGIN Header */
/**
******************************************************************************
* File Name : freertos.c
* Description : Code for freertos applications
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "usart.h"
int fputc(int ch,FILE *f)
{
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,HAL_MAX_DELAY);
return ch;
}
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
/* USER CODE END Variables */
osThreadId defaultTaskHandle;
osThreadId LED_TaskHandle;
osThreadId CMDprocess_TaskHandle;
osSemaphoreId BinarySemHandle;
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
/* USER CODE END FunctionPrototypes */
void StartDefaultTask(void const * argument);
void LEDTask(void const * argument);
void CMDprocessTask(void const * argument);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/* GetIdleTaskMemory prototype (linked to static allocation support) */
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize );
/* USER CODE BEGIN GET_IDLE_TASK_MEMORY */
static StaticTask_t xIdleTaskTCBBuffer;
static StackType_t xIdleStack[configMINIMAL_STACK_SIZE];
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize )
{
*ppxIdleTaskTCBBuffer = &xIdleTaskTCBBuffer;
*ppxIdleTaskStackBuffer = &xIdleStack[0];
*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
/* place for user code */
}
/* USER CODE END GET_IDLE_TASK_MEMORY */
/**
* @brief FreeRTOS initialization
* @param None
* @retval None
*/
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* Create the semaphores(s) */
/* definition and creation of BinarySem */
osSemaphoreDef(BinarySem);
BinarySemHandle = osSemaphoreCreate(osSemaphore(BinarySem), 1);
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* definition and creation of defaultTask */
osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128);
defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL);
/* definition and creation of LED_Task */
osThreadDef(LED_Task, LEDTask, osPriorityNormal, 0, 128);
LED_TaskHandle = osThreadCreate(osThread(LED_Task), NULL);
/* definition and creation of CMDprocess_Task */
osThreadDef(CMDprocess_Task, CMDprocessTask, osPriorityNormal, 0, 128);
CMDprocess_TaskHandle = osThreadCreate(osThread(CMDprocess_Task), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
}
/* USER CODE BEGIN Header_StartDefaultTask */
/**
* @brief Function implementing the defaultTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
for(;;)
{
osDelay(1);
}
/* USER CODE END StartDefaultTask */
}
/* USER CODE BEGIN Header_LEDTask */
/**
* @brief Function implementing the LED_Task thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_LEDTask */
void LEDTask(void const * argument)
{
/* USER CODE BEGIN LEDTask */
/* Infinite loop */
for(;;)
{
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_0);
osDelay(500);
}
/* USER CODE END LEDTask */
}
/* USER CODE BEGIN Header_CMDprocessTask */
/**
* @brief Function implementing the CMDprocess_Task thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_CMDprocessTask */
void CMDprocessTask(void const * argument)
{
/* USER CODE BEGIN CMDprocessTask */
BaseType_t err = pdFALSE;
/* Infinite loop */
for(;;)
{
if(BinarySemHandle !=0)
{
err = xSemaphoreTake(BinarySemHandle,portMAX_DELAY);
if(err == pdPASS)
{
printf("CMDprocessTask take the binary Semphore!\r\n");
printf("received CMD is:");
for (int i =0;i<8;i++)
printf ("%c",RxBuff[i]);
printf ("\n");
if(strncmp((char *)Rxbuff,"LED2on",6) == 0)
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_0|GPIO_PIN_1,GPIO_PIN_RESET);
else if(strncmp((char *)RxBuff,"LED2off",7) == 0)
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_0|GPIO_PIN_1,GPIO_PIN_SET);
else if(strncmp((char *)RxBuff,"LED3on",6) == 0)
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2|GPIO_PIN_3,GPIO_PIN_RESET);
else if(strncmp((char *)RxBuff,"LED3off",7) == 0)
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2|GPIO_PIN_3,GPIO_PIN_SET);
else if(strncmp((char *)RxBuff,"BUZZon",6) == 0)
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_SET);
else if(strncmp((char *)RxBuff,"BUZZoff",7) == 0)
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_RESET);
else
printf("invalid CMD,piease input LED2on LED2off BUFFon or BUFFoff\r\n");
}
else
vTaskDelay(10);
}
osDelay(1);
}
/* USER CODE END CMDprocessTask */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
RxBuff[Rx_Count++]=RxByte;
if((RxByte==0x0A)&&(BinarySemHandle!=0))
{
xSemaphoreGiveFromISR(BinarySemHandle,NULL);
print("Semaphore Give FromISR succesed!\r\n");
Rx_Count=0;
}
if(Rx_Count > 8)
{
print("Wrong CMD,Please Check...!\r\n");
memset(RxBuff,0,sizeof(RxBuff));
Rx_Count=0;
}
while(HAL_UART_Receive_IT(&huart1,&RxByte, 1)==HAL_OK);
}
/* USER CODE END Application */
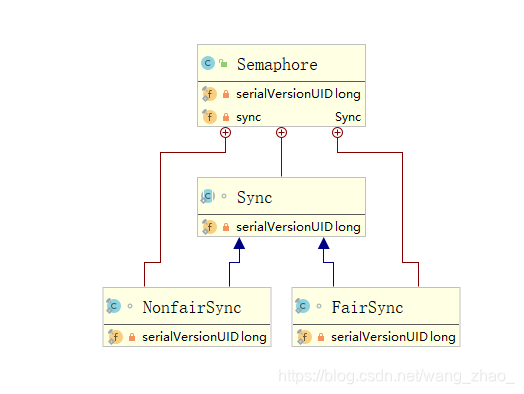
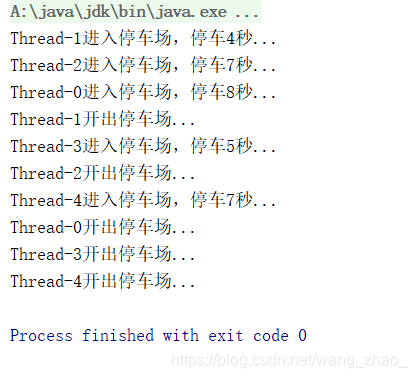
 信号量Semaphore详解
信号量Semaphore详解




 本文深入解析信号量Semaphore的工作原理,包括其作为计数信号量的角色,如何通过公平锁和非公平锁实现线程间的资源访问控制,以及在实际场景如停车场中的应用示例。
本文深入解析信号量Semaphore的工作原理,包括其作为计数信号量的角色,如何通过公平锁和非公平锁实现线程间的资源访问控制,以及在实际场景如停车场中的应用示例。

















 806
806

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









