






 本文介绍了AUTOSAR架构的基本概念及其在汽车电子通信中的作用。文章详细解释了从应用层到硬件层的数据传递过程,包括RTE层、BSW层等关键组件的功能。
本文介绍了AUTOSAR架构的基本概念及其在汽车电子通信中的作用。文章详细解释了从应用层到硬件层的数据传递过程,包括RTE层、BSW层等关键组件的功能。
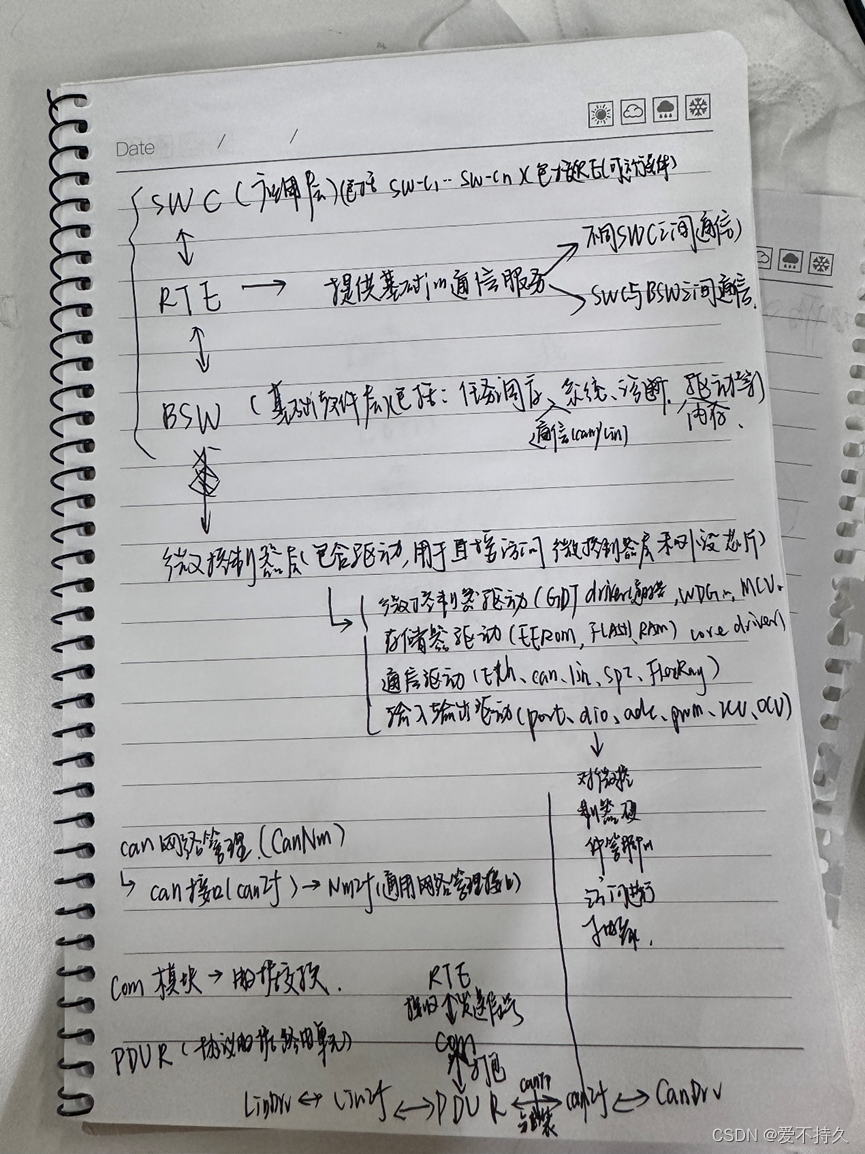
1.详细说明网上有很多,模块也很多,总之,autosar就是用来完成汽车电子中的通信的,下面就简单说一下这个过程,不会讲述详细模块的具体细节。
2.其实,autosar就分为这四层(应用层、RTE层、BSW以及MCL),我的理解:应用层主要是上层的变量和信号的处理。RTE主要是完成不同层直接的通信,里面会有RTE_READ 和RTE_WRITE这些函数可以被使用来读取一些信号或者变量值。BSW主要就是完成任务的调度通信等功能。
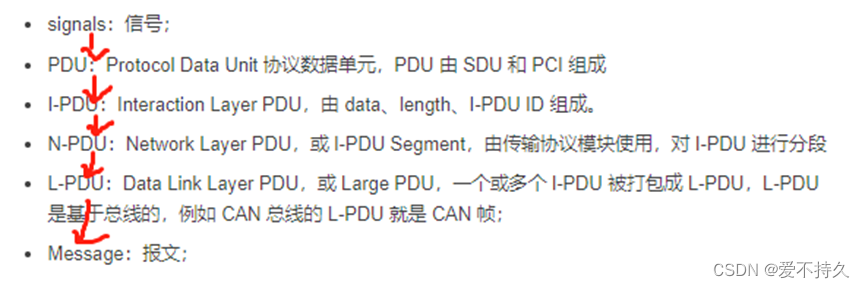
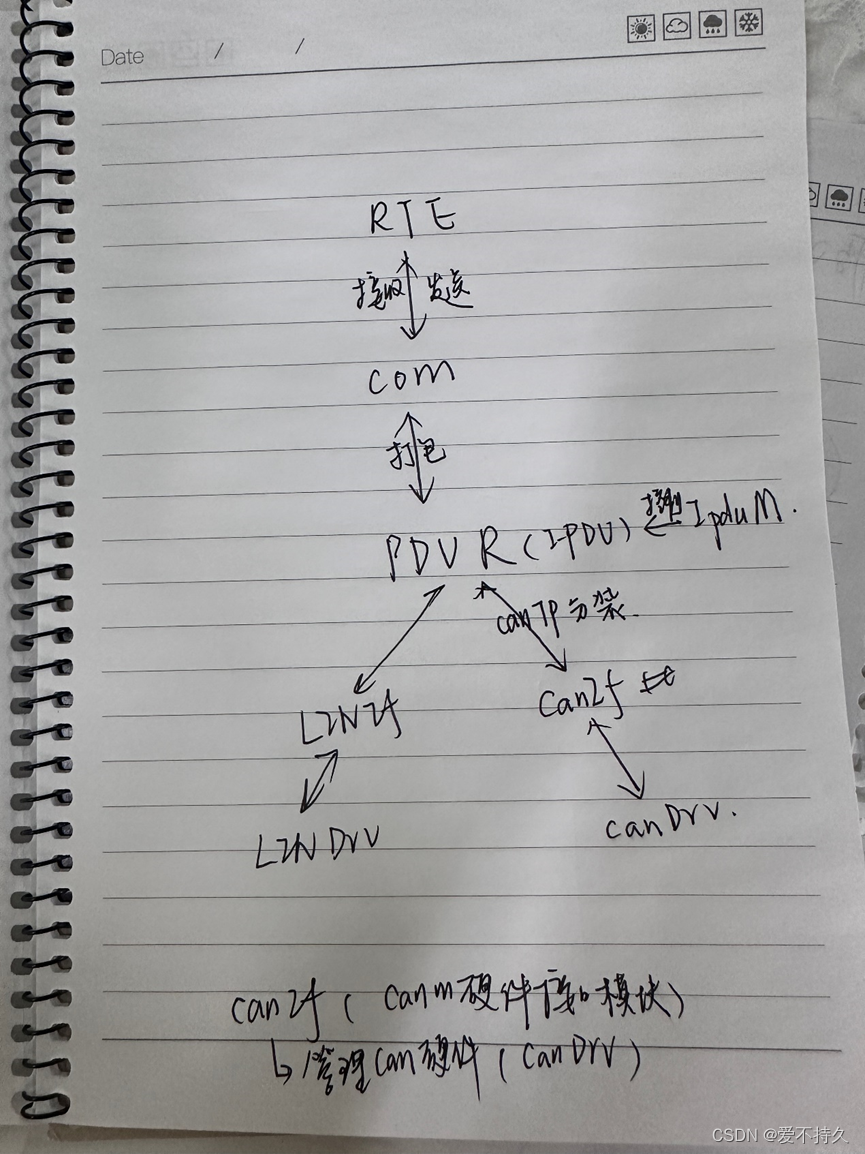
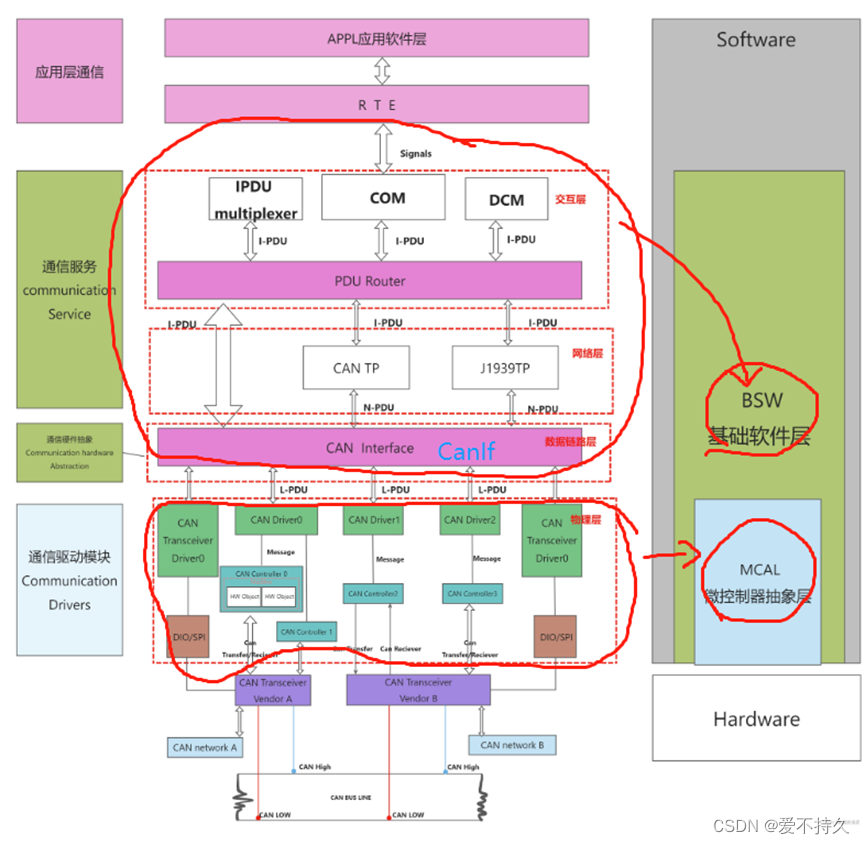
3.以一个信号为例:上层(应用层)给了我一个信号,我要把这个信号给到我的硬件上去,会经过以下大致流程:首先信号会通过RTE给到BSW层。BSW里的IPDU会处理这个信号把这个信号给PUDR(路由单元),然后PDUR会把信号给到CANTP进行处理,处理完给到CANIF(can硬件接口),然后再给到对应的驱动上,最后给到硬件上。经过中间那些层的处理主要是对这个信号进行封装和打包分段等相关处理,最后变成can报文,能让硬件看懂。简单理解就是这样,详细理解可以去知乎看。

















 3649
3649

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









