



本文介绍如何使用Arduino和声源定位模组控制SG90伺服马达,通过声源定位核心板的IO信号,实现马达在不同角度的定向转动,程序简单无需复杂算法。
声源定位模组+小智机器人
视频链接:
利用声源定制追踪制作的一个小玩意.使用arduino开发板做的.程序很简单.没有难度.主要是声源定位模组使用的是全硬件搭建.不需要去做调试和研究算法.
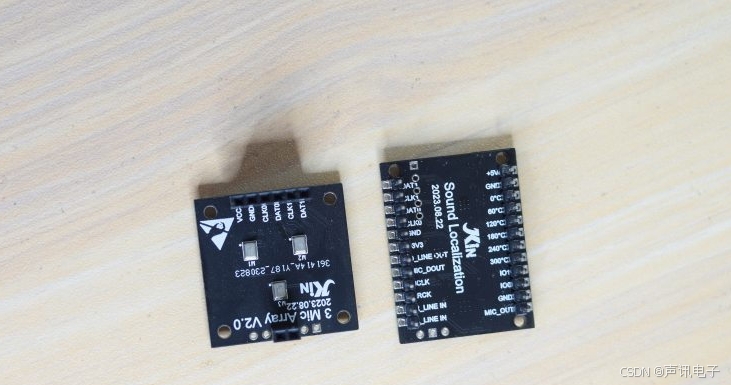
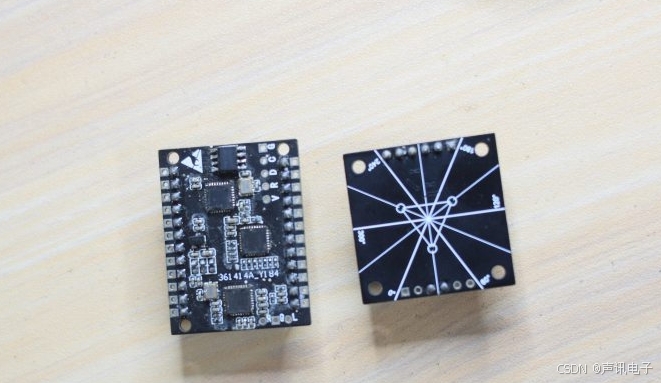
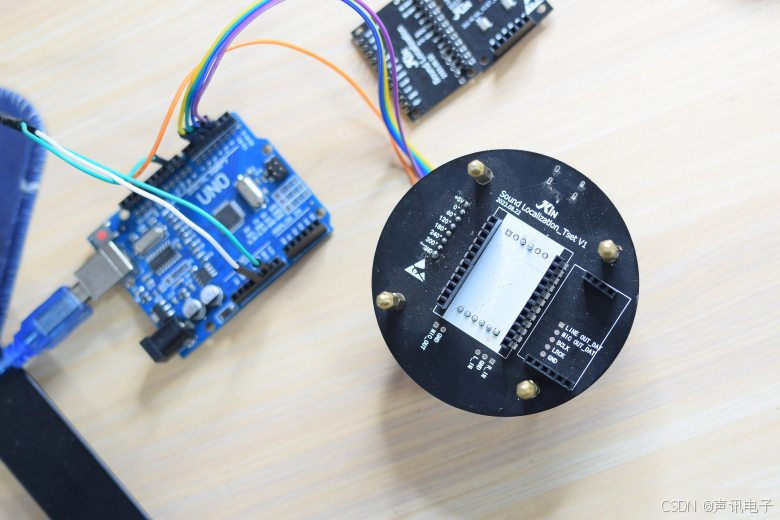
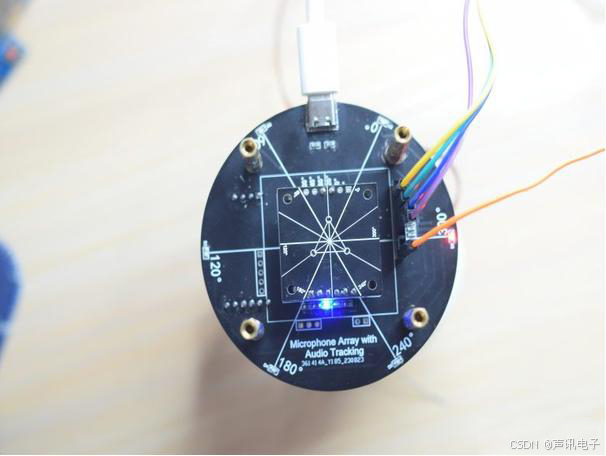
声源定位核心板和测试底座
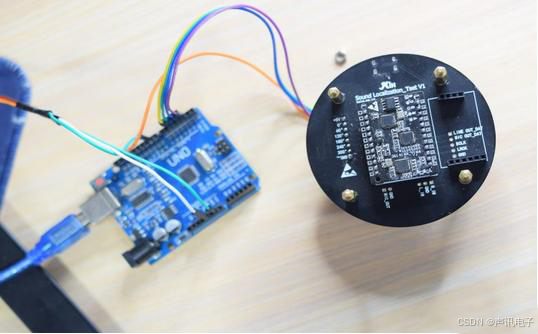
我使用了声源定位板的测试底座来连接,这样方便很多.这个不是必需要的,有别的支架可以不用这个底座效果也是一样的.我是找不到合适的支架就用这个现成的.还用了两块.
SG90伺服马达和云台

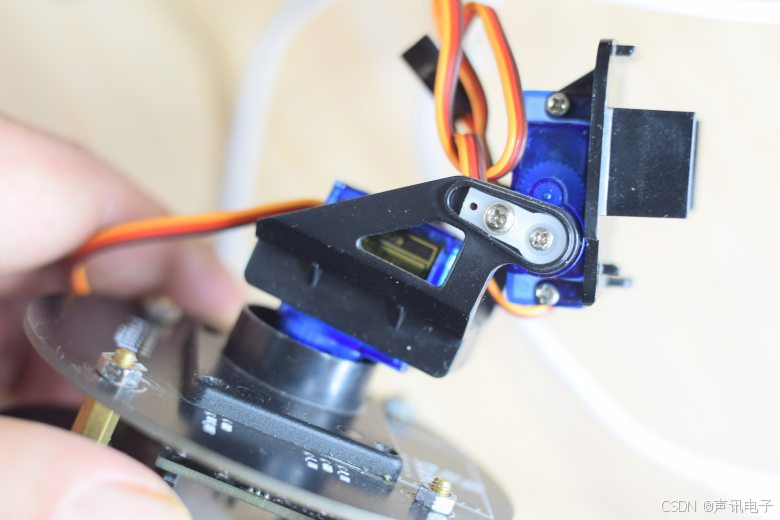
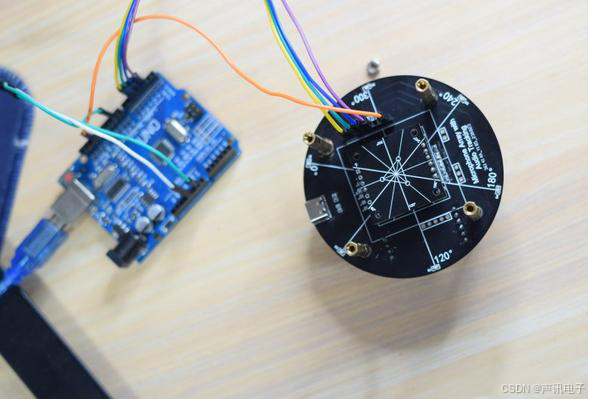
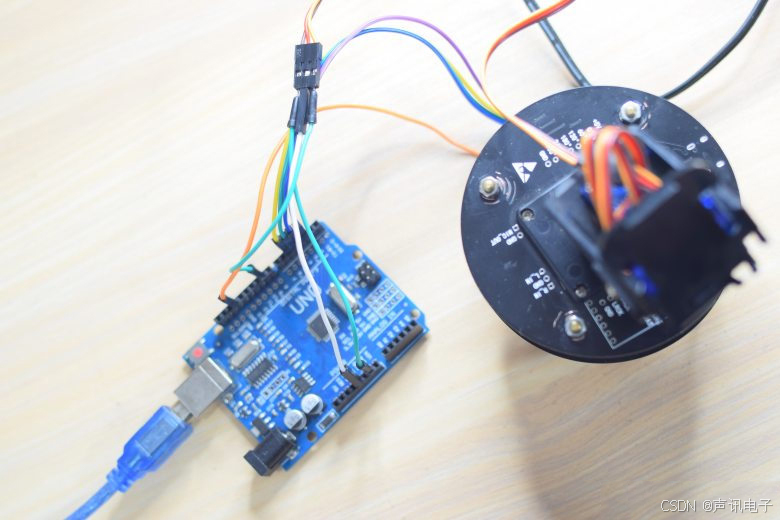
声源定位板和arduino的硬件连接
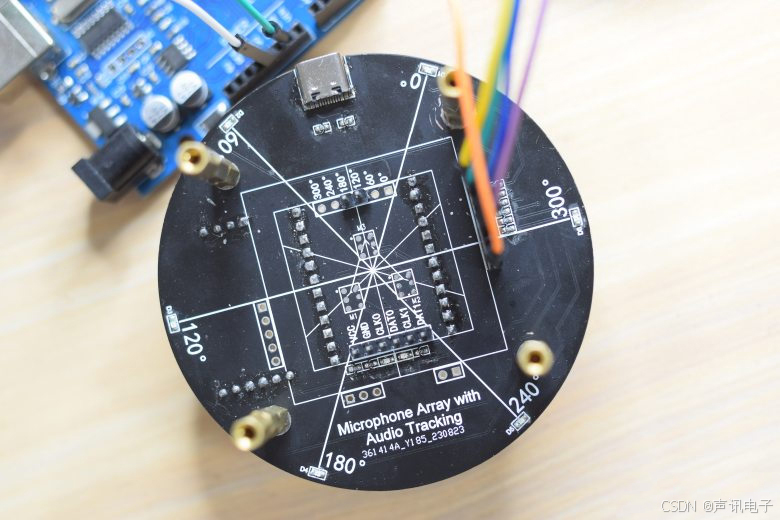
声源定位核心板把360度的声场平均分为6个角度范围.每个角度为60度.核心板上有6个角度的IO口.当某个角度追踪到声音的时候.相应的角度IO口会发送高电平指示.非常简单.
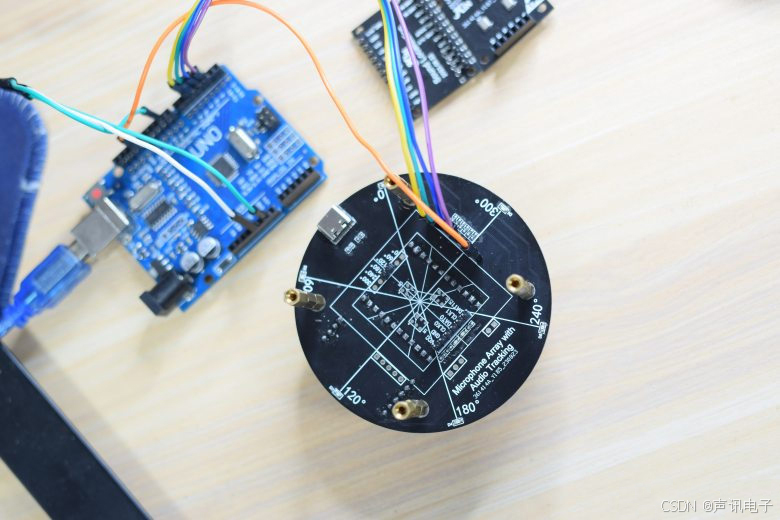
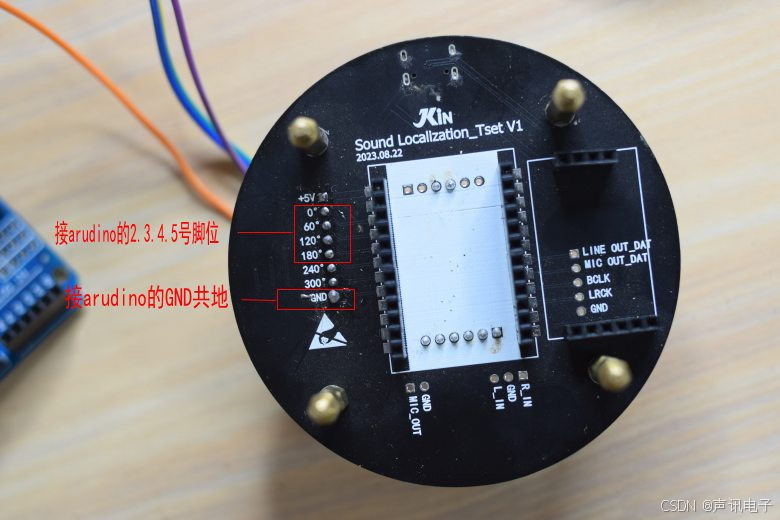
一.声源定位板脚位设置
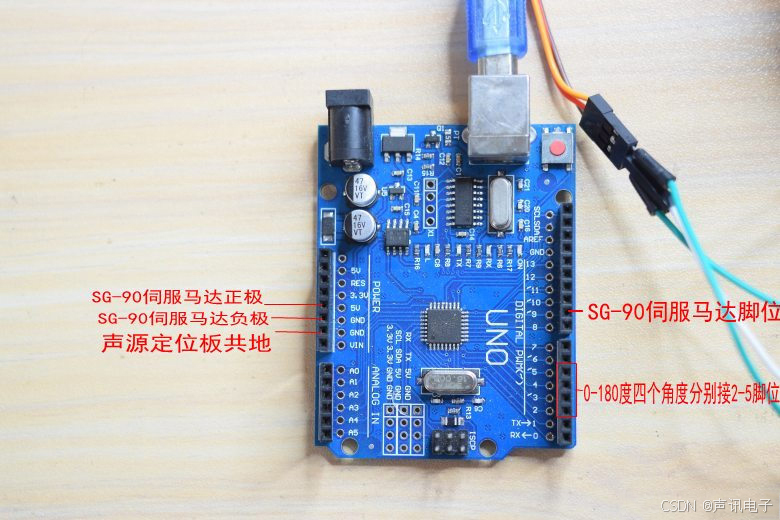
由于伺服马达只能转动180度.所以我在声源定位上取了从0-180度四个脚位的IO分别送入arduino的2.3.4.5号脚位.再把核心板的负极接arduino共地.
二.arduino脚位设置
组装完成:
arduino程序:
程序很简单.只要调用arduino的伺服马达库,然后定义0-180度四个脚位2.3.4.5为输入脚.默认舵机控制脚为9.
#include <Servo.h> int i= 0;Servo myservo; // create servo object to control a servo // twelve servo objects can be created on most boards int pos = 0; // variable to store the servo position void setup() { pinMode(2,INPUT);//定义0度角度输入脚位pinMode(3,INPUT);//定义60度角度输入脚位pinMode(4,INPUT);//定义120度角度输入脚位pinMode(5,INPUT);//定义180度输入脚位myservo.attach(9); //定义舵机脚位attaches the servo on pin 9 to the servo object} void loop() {
if (digitalRead(2) ==HIGH)//如果2脚电平为HIGH{ myservo.write(0); //伺服马达转动到0度delay(100); } //定义延迟100毫秒if (digitalRead(3) ==HIGH) //如果3脚电平为HIGH{ myservo.write(60); //伺服马达转动到60度delay(100); } //延迟100毫秒if (digitalRead(4) ==HIGH) //如果4脚电平为HIGH{ myservo.write(120); //伺服马达转动到120度delay(100); } //延迟100毫秒if (digitalRead(5) ==HIGH) //如果5脚电平为HIGH{ myservo.write(180); //伺服马达转动到180度delay(100); } //延迟100毫秒}
把以上程序入arduino,声源定位板接入usb电源.就可以进行测试了.
结束语:
这个声源定位板应为是纯硬件搭建..直接就可以进行应用.所以可以为我们省去声音定位软件的研究和调试.而且每个角度给出高电平指示.,编写arduino程序也非常简单.只要先调用自带的伺服马达库.然后根据声源板的每个角度给出的电平让arduino指定脚位输入.就可以实现当哪个角度有声源的时候.伺服马达就会向哪个角度转动.是不是很简单?有兴趣可以试试.


















 107
107

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









