



机器人的外观影响其行为对感知可信度和共情的影响
摘要
近年来,越来越多的伴侣机器人开始进入公众生活。这些机器人在外观和行为上各不相同。由于这两个因素可能对长期的人机关系产生影响,因此了解它们对伴侣机器人的作用至关重要。我们开展了一项实验,评估了机器人的外观及其行为在重复交互过程中对人类感知共情、可信度以及焦虑的影响。结果表明,高度拟人化机器人相比机器型机器人被认为更缺乏可信度和共情能力。此外,机器型机器人表现出消极行为时,其可信度和感知共情所受到的负面影响比高度拟人化机器人更为显著。另外,我们发现当机器人不赞成人类所说的内容时,会引发人类对其沟通能力的焦虑。我们的研究结果表明,作为伴侣,机器型机器人可能比高度拟人化机器人更合适。此外,当机器人不同意人类交互伙伴时,应能够提供关于其对对方信息理解情况的反馈,以降低对方的焦虑。
关键词 :人机交互、拟人化、信任、共情、焦虑
1 引言
大多数发达国家都面临着社会老龄化的问题。越来越多的老年人将需要他人定期提供帮助,而潜在的年轻帮助者数量却在减少。因此,人们希望技术能够应对这些社会人口结构的变化。正如Kidd和Breazeal[1]所指出的,人机交互领域的进步使我们能够开始构建能够在日常生活中与人互动并协助完成各种任务的机器人系统。
机器人由于其外观具有成为人类伴侣的巨大潜力。因此,确保机器人平台的设计和交互方式能够提高其可接受性至关重要。根据希尔林克等人[2]的研究,伴侣机器人的社交能力有助于提升用户对其的接受度。在维持关系方面,共情和信任是两个尤为重要的因素[3, 4]。此外,机器人不应引发焦虑,因为负面情绪可能导致用户拒绝使用机器人,尤其是在长期人机交互的背景下。
1.1 影响共情、可信度和焦虑的因素
共情被定义为“理解和恰当地回应他人情感状态的能力”[5]。它包括对他人情感状态的评估以及考虑到该情感状态的反应[6]。为了让机器人具备共情能力,它应当能够识别他人的情感状态、处理和表达自身情绪、与他人交流以及进行换位思考[7]。
伴侣机器人的另一个重要方面是其可信度。信任是指个体相信对他或她的福祉有影响的他人不会采取有害行为[8]。因此,一个可信赖的机器人是指能够在互动伙伴中激发对其行为信任的机器人。相比环境或与人相关的因素,机器人性能在被视为可信方面更为重要[8]。因此,在本研究中,我们重点关注了机器人积极或消极行为这一重要的机器人行为因素对其感知的影响。我们选择了行为的正面和负面维度,因为未来的伴侣机器人可能不仅需要执行正面行为,还可能表现出被人们视为负面的行为,例如当一位老年人不愿意服药时,机器人多次要求其服药。
此外,个体的性别与机器人感知性别的关系会影响可信度;异性机器人比同性机器人被认为更具可信度[9]。这种效应在男性参与者中尤为明显。另外,有研究指出,判断新型伙伴机器人可信度的准确性在很大程度上依赖于非语言线索[10]。此外,尽管共情行为可以提高机器人的可信度,但其感知智能并未导致任何变化[11]。
1.2 机器人外观的影响
尽管人们认为类人交流比类人外观[12]对伴侣机器人更重要,但机器人的外观可能是一个重要的因素,影响人们对机器人共情和可信度的感知。物理形态会影响人们对机器人初始可信度的判断[13]。此外,人们更倾向于选择具有类人外观和属性的机器人作为伴侣,尽管这种效应在很大程度上取决于个体差异[14]。此外,对机器人的负面态度会降低对机器人感知类人程度的评价[15]。机器人高度类人的外观也可能对其可信度产生负面影响[16]。
Riek等人[17]指出,人们对拟人化机器人表现出更多的共情,因为更容易与它们产生关联。然而,米塞尔霍恩[18]假设,具有少量但显著类人特征的机器人可能比高度拟人化机器人被感知为更具共情能力。另一方面,在动物中已发现其拟人化程度与感知共情之间存在关联[19]。由于高度拟人化机器人可被用作长期伴侣,因此了解其外观如何影响其感知共情和可信度非常重要。
先前的研究表明,在信任技术方面存在文化差异[20, 21]。美国参与者比中国参与者更信任机器人助手,除非机器人被呈现为一个强有力的内群体成员[21]。这意味着关于感知可信度的研究可能依赖于文化背景。此外,这些发现可能不仅限于特定国家,而更可能是个人主义与集体主义文化之间的差异所致。在本研究中,我们使用了一款高度类人的人形机器人,其外观类似于参与研究的参与者所属群体(日本人)。由于机器型机器人在外形上不类似人类,其作为内群体成员的身份较弱。因此,我们希望探究机器人的外观是否会影响其被感知的可信度(如果[21]的研究结果可推广至中国以外的其他集体主义国家,则此效应将出现)。
人机交互(HRI)中另一个需要考虑的重要因素是焦虑。焦虑是一种对未来混合着恐惧和不安的情绪,可能由情境的变化引发[22]。在交互过程中,人们不应感受到由机器人引起的焦虑。然而,机器人的外观可能会引发负面感受。森政弘的恐怖谷理论[23]描述了外观与人们情绪反应之间的关系。他提出,随着类人度的增加,人们对机器人的亲和力也随之提升。但当机器人几乎与人类无法区分、却又不完全完美时,人们会产生强烈的负面情绪反应。对于伴侣机器人而言,这种情况可能尤为突出,因为高度拟人化机器人可能会被拒绝作为与人类共同生活在自然人类环境中的伴侣。
1.3 信任、共情和焦虑对人机交互的影响
信任和共情都会影响人机交互。研究表明,机器人被感知到的共情对人机交互具有正面影响。机器人的共情行为对儿童和成人对机器人的看法产生了正面影响[24, 25]。一台具有共情能力的机器人在陪伴性、喜爱度和可信度方面的评分也更高[11, 26]。
机器人的信任度和共情能力彼此之间也并非完全独立。在正面情境下,当机器人的共情反应与用户的情感状态一致时,其可信度有所提升[15]。然而,在负面情境下,若机器人以正面方式作出回应,则被认为更具共情能力。
先前的研究探讨了伴侣机器人在中性或友好的交互场景中的应用,这些场景因其特性有助于促进关系的建立。然而,现代社会面临快节奏的生活方式,导致人们承受压力。在日本,46.5%的12岁以上人群报告在日常生活中经历压力[27]。因此,伴侣机器人应准备好在高压情境下与人互动。根据小野等人[28]的研究,他人的共情行为可以减轻个体所感受到的压力。这一目标也有可能通过伴侣机器人实现。因此,我们认为,在压力情境下,人类所体验到的焦虑是评估伴侣机器人的另一个重要指标。
1.4 研究问题
根据上述讨论,本研究探讨了以下研究问题:
RQ1: 机器人的行为和类人外观程度如何影响感知共情和信任度?
RQ2: 机器人的行为和类人外观程度如何影响交互焦虑?
此外,由于机器人外观和行为的初始效应可能会随着反复互动而改变(这对伴侣机器人尤为重要),我们还通过第三个研究问题探讨了这一方面:
RQ3: 机器人的外观和行为对感知共情、可信度和焦虑的影响是否会随着重复交互而改变?
在下一节中,我们将介绍本研究中使用的实验方法。实验的结果在第3节中呈现,并在第4节中进行讨论。最后,第5节给出了我们研究的主要结论及其局限性。
2 方法
该实验是一项更大规模研究的一部分,涉及额外的测量。本文仅呈现相关的测量和结果。我们进行了一项包含3个因素的实验。本研究是一项混合设计实验,其中机器人的外观(类人 vs 机械式)和行为(正面 vs 负面)为被试间因素,互动轮次(第一轮互动、第二轮互动、交互 III阶段)为被试内因素。因此,总共有4种被试间条件和3个被试内测量轮次。我们使用问卷来测量交互焦虑以及机器人感知共情和可信度。
2.1 材料
本研究使用了两个机器人。第一个机器人是人形机器人 Geminoid HI-2,它是真实人物的第二代机器人复制品(见图1)。第二个机器人是更具机械式外观且性别中立的机器人罗博维 R2。该机器人具有一些类人特征,如头部和手部,但明显可与人类区分。两个机器人均使用相同的合成语音,并具有轻微顿挫的动作。此外,为了增强其生动性,两个机器人在交互过程中都有空闲动作。Geminoid HI-2的嘴唇与其语音同步,并表现出类似呼吸的动作。罗博维 R2在说话时的空闲动作包括头部运动和轻微的手部动作。

2.2 参与者
我们为这项研究招募了60名母语为日语的说话者。他们由一家针对学生的招募机构通过其网络服务发布消息进行招募。每位参与者获得2000日元的时间补偿。参与者被随机分配到不同条件中。由于属于不同条件的2名参与者的数据损坏,我们排除了他们的数据进行分析。剩下的58名参与者(26名女性和32名男性)均为日本不同大学和院系的本科生。他们的年龄在18至36岁之间,平均值为21.5岁。
2.3 实验设置
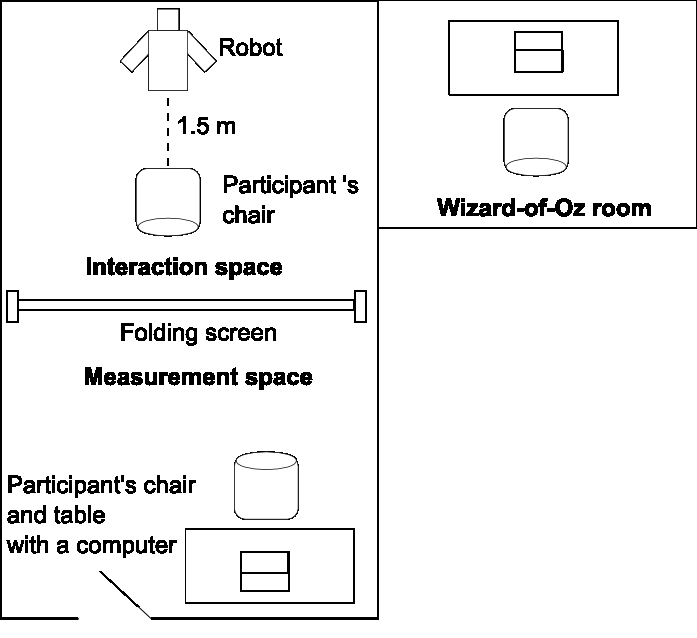
实验房间通过一个折叠屏风被分为两个部分(见图2)。交互区是所有交互发生的地方,也是机器人的所在位置。在测量区,参与者在计算机上完成问卷。将这两个区域分开可以确保参与者无需在机器人面前回答问题,因为在该情境下如果媒体方程效应产生影响,可能会对结果造成干扰[29]。实验过程中,机器人由另一个房间内隐藏的人类操作员控制(即魔法之王)。
2.4 实验步骤
在填写知情同意书并观看介绍实验流程的视频后,实验员告知参与者,该研究的目的是探讨创造性与说服性交谈。参与者的任务是在面试中说服机器人将工作机会给予自己。工作面试是一种压力极大但结构相对清晰的情境。由于机器人担任面试官的角色,我们只需编程设定有限的回应方式,即可确保所有参与者接受相同的处理。此外,在这一特定情境下,机器人对人类陈述的认可或不认可应具有足够强度,使其对参与者而言具有相关性。
一种机器人表现出积极或消极行为的互动情景
向参与者提供了相同的准备好的简历,并要求他们根据这些简历来回答问题。然而,他们被告知这些简历仅提供了一般性背景信息,在需要时他们还可以添加额外的信息以说服机器人给他们提供工作。此外,为了激励参与者完成该任务,他们被告知如果能够成功说服机器人获得工作,他们的时间补偿金将会增加。在参与者确认理解了说明后,他们被带到一台计算机前。实验分为四个阶段:前交互阶段、交互I阶段、互动II和交互 III阶段。当参与者与机器人互动或填写问卷时,他们会独自留在房间内。
机器人经常在日本的电视节目、展览中或剧院、购物中心等公共场所向更广泛的观众展示。尽管在实验中已仔细筛选参与者,确保他们从未与本研究中分配给他们的特定机器人进行过互动,但他们仍有可能在电视上见过该机器人或外观相似的其他机器人。因此,为了尽量减少期望值的差异,他们观看了一段简短的视频(19秒),视频内容是他们所分配到的
机器人在前交互阶段1。在该视频中,机器人使用与实验其余部分相同的语音进行自我介绍,并描述了其功能(两个机器人的对话内容相同)。视频结束后,参与者填写了所有问卷。
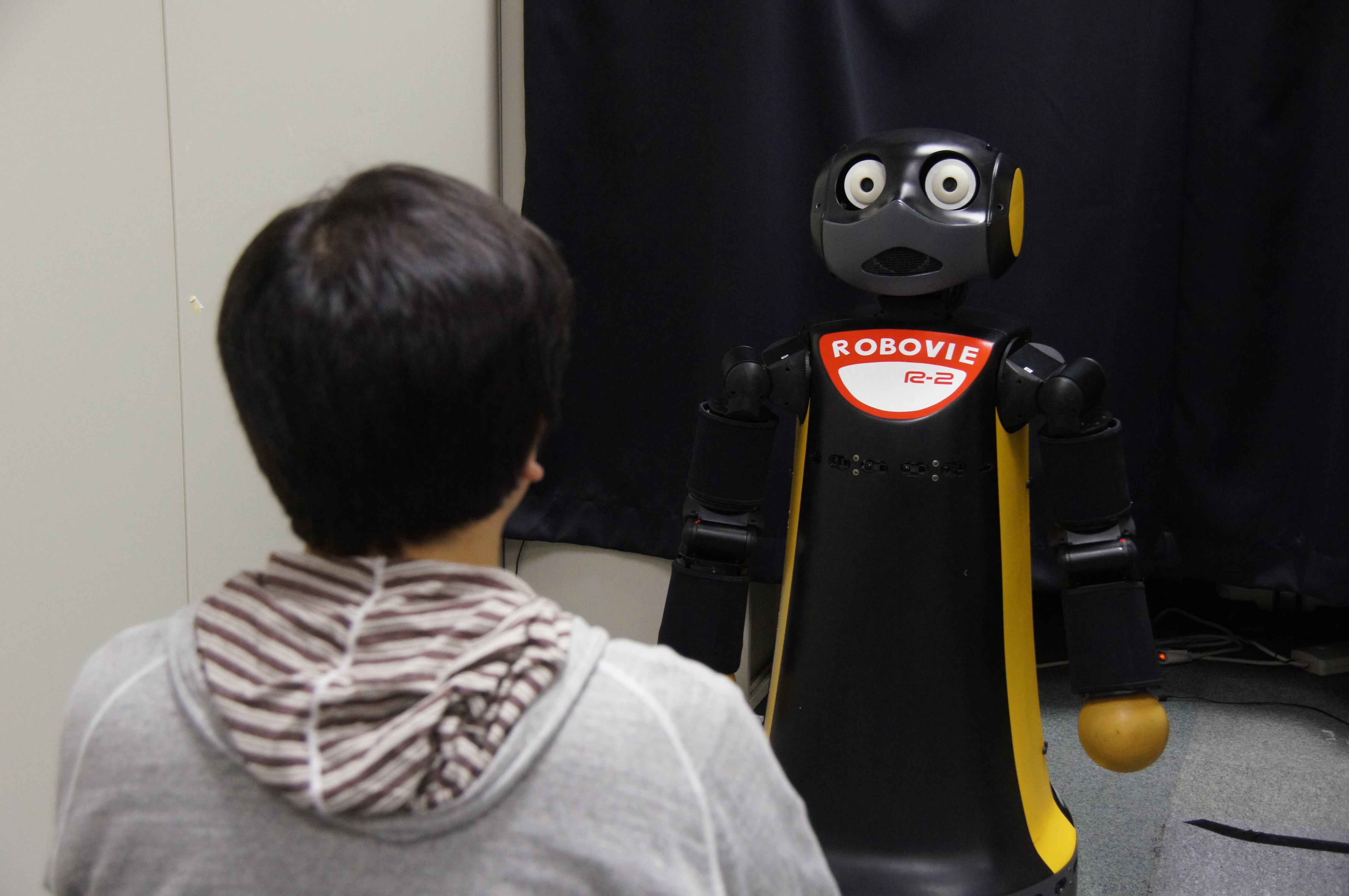
在交互I阶段,参与者被带到互动区,坐在距离机器人1.5米的位置(见图3)。在此阶段,他们需要通过与机器人进行简短对话来熟悉它。机器人被介绍为Robo,并会提出三个中性问题,例如“你从哪里来?”或“今天很冷吗?” 对话结束后,参与者返回测量区并填写问卷。
在互动II之前,参与者收到了简历和相关材料,其中包含他们所申请职位的信息。这些职位为银行经理或工程师,职位顺序在互动II和III之间进行了平衡。简历内容完全相同,但申请人姓名的性别与参与者自身性别一致。参与者有5分钟时间阅读提供的材料并准备面试。时间结束后,实验员收回职位描述和简历,并将参与者带到机器人处。
首先,机器人简要介绍了参与者所申请的公司和职位。随后,它提出了3个工作面试问题。这些问题较为通用,通常在不同职位的工作面试中都会遇到,例如“你最大的缺点是什么?”或“请介绍一下你自己”。每个问题之后
1 机器人在前交互阶段视频中所说文本的英文翻译:“我是ROBO。我被开发用于与人交流。我可以利用多种功能表现得像人类一样与人沟通。”
机器人感谢了参与者并进入下一个环节。当所有问题回答完毕后,机器人告知参与者它将稍后宣布是否给予工作机会的决定(实际上这个决定从未公布)。
在互动II结束后,参与者被要求填写问卷。此次问卷中增加了关于面试的虚拟问题(例如:“我认为我的解释说服了机器人”)。互动III与互动II相同,但职位、简历以及机器人提出的问题有所不同。互动III的目的是增加交互次数,其内容相较于互动II略有修改,以确保参与者无需多次重复完全相同的面试。整个实验大约持续1小时。
2.5 自变量
本研究中有3个自变量:机器人的外观、行为和互动轮次。
我们通过让参与者与Geminoid HI-2或Robovie R2进行互动来操控外观因素。
机器人的行为通过其在工作面试中的不同反应表现出来。机器人使用非词汇对话声音和非语言交流提供反馈。在积极行为条件下,它通过点头或点头并发出“嗯”(日本人表示同意说话者所说内容的一种方式)来表达赞同。在消极行为条件下,它摇头,或点头并发出“啊嗦”(日本人用来粗鲁地表达对说话者所说内容缺乏兴趣的方式)。为了确保对话的自然流程,这些反馈由魔法之王启动(例如,当参与者完成一个句子时)。
此外,尽管机器人未提供面试结果,但其在不同条件下的回应存在差异。在正面条件下,机器人表示它喜欢这些回答;在负面条件下,机器人则暗示这些回答并不特别令人印象深刻。此外,参与者与机器人交互了3次,每次交互均为一次独立的被试内测量。
2.6 测量
我们通过一个陈述句测量了机器人感知共情,即“我认为机器人理解我的感受”,评分从1(绝对不)到7(绝对同意)。此外,我们通过一个单
“您对该机器人的信任程度如何?”这一问题同样采用 7点量表进行评分(从完全不信任到非常信任)。我们使用单一题项来测量感知共情和可信度,以降低因重复测量带来的疲劳风险。此外,我们采用了机器人焦虑量表(RAS)的三个子量表,用于从沟通能力、行为特征和对话三个方面测量参与者对机器人的状态焦虑[30]。每个RAS子量表均采用6点量表,并使用其原始日文版本。这些子量表独立使用,用于测量参与者对与其互动的机器人焦虑程度。
3 结果
我们使用三因素方差分析(ANOVA)对数据进行分析,其中外观和行为作为被试间因素,互动轮次作为被试内因素。在所有分析中,我们采用p值=.05作为显著性阈值。我们使用广义eta平方报告效应量,因为它是重复测量设计中推荐的效应量指标[31]。
3.1 感知共情
首先,我们考察了感知共情。我们发现外观的主效应显著,F(1, 54) = 4.03, p=.05, η²G=.21(见图4)。Robovie R2(M= 4.02, SD=1.58)比Geminoid HI-2(M= 3.43, SD= 1.26)被认为更具共情。我们还发现了行为的主效应,F(1,54) = 10.16, p=.01, η²G=.12。具有积极行为的机器人(M= 4.17, SD= 1.43)比具有负面行为的机器人(M= 3.26, SD= 1.33)被认为更具共情。交互轮次的主效应不显著。
在外形和行为之间存在显著的交互效应,F(1, 54) = 8.77,p=.01, η²G=.11。Geminoid HI-2 的行为并未影响其感知共情水平。另一方面,当 Robovie R2 表现出正面行为(M= 4.93,SD= 1.11)时,相较于表现出负面行为时(M=3.12,SD= 1.47),被认为更具共情能力,F(1, 26) = 17.44,p<.01, η²G=.4。
此外,交互轮次与行为之间的交互效应也显著,F(2, 108) = 9.47,p<.01,η²G=.04。在交互I阶段,机器人的行为对感知共情没有影响。然而,在后续的交互中,积极行为提升了机器人被感知的共情水平(互动II: F(1, 56) = 12.72,p<.01, η²G=.19,正面M= 4.17,SD= 1.54,负面 M= 2.86,SD= 1.25;互动III:F(1, 56)=10.33, p=.01, η²G=.16,正面M= 4.45,SD= 1.4,负面 M= 3.24,SD= 1.46)。外观与互动轮次之间的交互效应,或外观、行为与互动轮次之间的三向交互效应均不显著。
3.2 可信度
同样,可信度受到外观的显著影响,F(1, 54) = 5.37, p=.02, η²G=.07(见图5)。Geminoid HI-2(M= 4.22,SD= 1.17)被认为比Robovie R2(M= 4.86, SD=1.5)更不可信。此外,人们对表现出正面行为的机器人(M= 4.87,SD= 1.41)比表现出负面行为的机器人(M= 4.18,SD= 1.24)更为信任,F(1, 54) = 6.88,p=.01, η²G=.08。交互轮次的主效应不显著。
外观与行为之间存在显著的交互效应,F(1, 54) = 9.67,p=.01, η²G=.11。Geminoid HI-2 的行为对信任无影响,但 Robovie R2 则不同。当 Robovie R2 表现出积极行为时(平均值 = 5.64,标准差 = 1.03),其可信度高于表现出消极行为时(平均值 =4.07,标准差 = 1.49),F(1, 26) = 15.13,p<.01, η²G=.37。此外,互动轮次与行为之间也存在交互效应,F(2, 108) = 5.5,p=.01, η²G=.03。在 交互I阶段,行为对信任没有影响。然而,在 互动II 阶段,机器人表现出积极行为 (平均值 = 4.86,标准差 = 1.46)时的可信度高于表现出消极行为时(平均值 = 3.9,标准差 = 1.18),F(1, 56) = 7.71,p=.01, η²G=.12。同样,在 互动III 阶段,积极行为(平均值 = 5.1,标准差 = 1.4)相比消极行为(平均值 = 4.14,标准差 = 1.36)导致更高的可信度,F(1, 56) = 7.13,p=.01, η²G=.11。外观与互动轮次之间的交互效应,以及外观、行为和互动轮次之间的三向交互均不显著。
3.3 焦虑
机器人焦虑量表(RAS)包含三个信度足够的子量表:对机器人沟通能力的焦虑(Cronbach’s α=.91)、对机器人行为特征的焦虑(α=.95)以及对与机器人对话的焦虑(α=.87)。因此,
我们针对每个子量表进行了单独的分析。
对机器人沟通能力的焦虑受到机器人的行为显著影响,F(1, 54) = 5.9,p=.02, η²G=.07,见图6。当机器人表现出负面行为时(M= 3.37,SD= 1.12),人们对机器人沟通能力的焦虑程度高于其表现出正面行为时(M= 2.75,SD= 1.22)。无其他主效应或交互效应具有统计学显著性。
对于行为特征子量表的焦虑,由于莫克利检验表明球形假设被违反(W=.84,p=.01),我们对交互轮次的主效应应用了休恩‐费尔特校正。结果显示交互轮次的主效应显著,F(1.78,96.15) = 3.33, p=.05, η²G=.01 (见图7)。使用Bonferroni校正的事后检验发现,参与者在交互I阶段后对机器人行为特征的焦虑程度(M= 2.85,SD= 1.1)高于互动II阶段后(M=2.56,SD= 1.17),p=.02。其他主效应或交互效应均未达到统计学显著性。
在对话焦虑分量表上,主效应或交互效应均无统计学显著性。
4 讨论
本研究探讨了机器人的外观和行为在多次互动中对可信度、感知共情和焦虑的影响。由于感知共情和可信度的结果呈现出相同的模式,我们将对其进行合并讨论。
我们的结果明确强调了机器人外观与其行为之间相互作用的相关性。总体而言,Geminoid HI-2 被认为比 Robovie R2 更缺乏信任感和共情能力。这是因为当 Robovie 表现出积极行为时,人们认为它比表现出负面行为时更值得信赖且更具共情能力;而即便 Geminoid HI-2 表现出积极行为,人们对它的感知也并未改变。
这些结果与米塞尔霍恩[18]所提出的假设一致。高度拟人化机器人被认为比具有少量显著类人特征的机器人共情能力更低。然而,我们的结果为进一步阐明该假设提供了新的视角。类人机器人的行为并未对其可信度和共情产生显著影响。而对于更偏向机械式的机器人,其对人类的行为和举动则是决定因素其感知共情和可信度。这表明机器型机器人可能更适合作为伴侣,且交互设计应允许它们与人类伙伴表达积极行为。
此外,结果表明,具有更强内群体外观特征的机器人(Geminoid HI-2 类似于日本人)被认为比不会引发内群体成员身份的机器人更不可信。先前的研究[21]表明,对于中国参与者而言,被呈现为内群体成员的机器人比外群体机器人更受信任。由于我们的研究结果呈现出相反的模式,因此内群体成员身份对感知信任度的影响可能并非集体主义文化的普遍特征,而是中国文化所特有的。另一种可能是,参与者并未将 Geminoid HI-2 的外观视为内群体成员。或许,这个人形机器人与人类不完全相似的外观导致其被排斥在内群体成员之外。
本研究中关于机器人感知可信度的结果的另一种解释可能是由于两个机器人使用了相同的合成语音。合成语音对每个机器人的影响可能不同。Gong和Nass [32] 报告称,声音与外观之间的一致性会影响代理的感知可信度。在他们的研究中,人们更信任具有人类声音的自然人类代理或具有合成语音的人形代理,而不信任外观与声音不匹配的代理。因此,在我们的研究中, Geminoid HI-2的高度类人外观可能被认为与其合成语音不一致,从而导致感知信任度降低。另一方面,对于 Robovie R2而言,合成语音可能被认为与其外观一致。
交互轮次与行为之间的报告交互效应是我们操纵的结果。交互I阶段在正面和负面两种条件下均为中性。因此,感知共情和可信度在交互II和III中受到行为的影响这一事实表明,我们的操纵是成功的,这种差异并不仅仅源于被分配到不同条件下的参与者之间的个体差异。
我们还测量了参与者在人机交互各个方面所感受到的焦虑。我们发现,当机器人表现出消极行为时,参与者对其沟通能力感到更加焦虑。积极行为也使机器人被感知为更具共情行为。因此,该结果与小野等人[28]的研究一致,他们表明在人类中人际互动可以减轻个人所承受的压力。
然而,这一发现可能部分归因于研究设置。在负面条件下,机器人表现出对人类所说内容的不感兴趣和不赞成。由于参与者的目的是说服机器人,他们可能会将机器人的反应解读为未能理解其劝说性语句。另一方面,在正面条件下,机器人表现出对参与者信息的兴趣。这可能被解读为机器人理解了复杂句子。
我们在人际交往中可以找到一个类似的类比:当说非本地语言的外国人被当地人接近时,外国人的点头就足以被理解为她理解了对方所说的话,而不管其实际的语言理解能力如何。在人机交互(HRI)的背景下,机器人仅通过点头就能营造出理解人类言语的印象,这可能会减轻人们对机器人沟通能力的焦虑。然而,在本研究中,参与者没有机会了解机器人是否真正理解了他们所说的话。对于伴侣机器人而言,这种行为上的模糊性可能带来深远的影响。如果人类相信自己的指令已被机器人理解,而实际上机器人并未理解信息,则可能导致误解。另一方面,一个令人不悦的机器人可能会引发对其沟通能力的焦虑。
因此,未来的研究应探讨一种更清晰的方法,以表明机器人对人类信息的理解程度。设计机器人时,应使其能够向人们反馈其话语已被机器人理解,即使机器人不同意该陈述。这种额外的反馈可以减少人类产生的焦虑,因为它能明确表明分歧的来源并非由于对所提供口头输入的误解。
我们未发现我们的操纵对与机器人对话的焦虑产生任何影响。然而,对于针对机器人行为特征的焦虑,存在交互轮次的主效应。人们最初对机器人的外观更为焦虑。这种焦虑在第二次互动时消失,表明参与者迅速适应了其机器人互动伙伴的外观。
4.1 局限性
在这个实验中,我们只使用了两个机器人。如果我们选择了另一对机器人,结果可能会有所不同。任何包含多个机器人的研究都可能面临一个问题,即如何确保这些机器人仅在拟人化程度这一维度上存在差异,例如机器人在外貌吸引力、尺寸、坚固性等方面也可能有所不同。在我们的研究中,Geminoid HI-2 严肃的外观可能导致了更大的心理距离。外貌是影响对陌生人初始信任的重要因素[33]。一个看起来更友善的女性人形机器人,例如 Geminoid F,可能因其友好的外观而被认为更具可信度和共情能力。此外,未来的研究应探讨所有类人机器人的行为是否都会影响其感知共情和可信度,或者机器人是否必须首先具备友善的外观,其行为才能产生影响。另外,在本研究中,我们未测量 Robovie R2 的感知性别。尽管其设计类似于儿童,但我们不能排除它被感知为女性的可能性。先前的研究表明,人类与机器人性别之间可能存在交互效应[9]。为了确认研究结果并非由机器人感知性别的差异所致,未来的工作应验证 Robovie R2 在该维度上的感知情况。
5 结论
本文讨论了机器人外观和行为在重复交互中对陪伴机器人关键因素(感知共情、可信度和焦虑)的影响。我们发现,与具有某些类人特征的机器型机器人相比,高度拟人化机器人被认为可信度和共情水平更低。此外,人形机器人的行为对其感知评价没有显著影响。对于类人程度较低的机器人,积极行为比消极行为带来更高的感知可信度和共情。另外,我们发现当机器人不赞成人类所说的话时,会增加人们对机器人沟通能力的焦虑感。
我们的研究为伴侣机器人的设计选择提供了若干指导建议。由于机械式机器人比高度拟人化机器人具有更高的感知信任度和共情水平,因此前者可能比人形机器人更适合作为伴侣。此外,对于这些机械式机器人而言,其行为被感知为正面至关重要,否则其感知可信度和共情水平可能会下降。我们的结果还表明,尽管合成语音适用于Robovie R2,但若由人形机器人使用,则可能对其感知产生负面影响。因此,这些高度拟人化机器人应使用人类声音进行交流。
这听起来并不像机器人。最后,我们发现如果机器人的行为可能导致拒绝某人的观点,那么机器人应该能够对所理解的内容提供反馈。在这种情况下,如果机器人没有明确表明它理解了什么,可能会增加人们对机器人消极行为来源感到不确定时的焦虑。
本研究中使用的特定交互场景并非伴侣机器人常见的场景。然而,我们认为外观和行为在伴侣机器人情境下同样重要。本文报告的研究结果与影响与机器人建立情感联结的关键因素相关。我们希望这项工作能促进对外观、行为以及伴侣机器人感知之间关系的进一步研究。

















 18
18

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









