 小型遥控太阳能垃圾船
小型遥控太阳能垃圾船




一种小型遥控近岸漂浮垃圾收集船
摘要
本研究开发了一种用于收集近岸漂浮垃圾的小型遥控船。所研制的收集船体积小、低成本且具有浅吃水特性,适用于在浅水区、沙质海岸和礁石附近收集漂浮垃圾。该船配备有漂浮拦截网,可通过该网收集垃圾。遥控装置上的基于网页的界面使得该船可通过智能手机、平板电脑、笔记本电脑或台式计算机进行控制。此外,该收集船采用太阳能作为辅助动力,以延长作业时间。
I. INTRODUCTION
近年来,海洋垃圾已成为一个重要的全球环境问题。每年有数百万吨垃圾进入海洋,其中大部分来自陆地,并从近岸流向海洋。一些垃圾可能会随水流回到海滩,可人工清除;但另一些则随洋流漂向海洋深处。一种可能的海洋垃圾清除方法是使用长型拦截装置收集海面上的漂浮垃圾,并由大型运输船进行回收[1]。另一种更经济的方法是在垃圾靠近海岸时进行收集。本研究开发了一种小型遥控船,用于收集近岸漂浮垃圾,以减少流入海洋的垃圾量。
与上述大规模垃圾清理系统相比,所提出的垃圾收集船由于体积较小,可在礁石之间穿梭,并可在浅水区域航行而无需深吃水。此外,采用太阳能[2][3]作为辅助动力,以延长运行时间。
II. SYSTEM CONFIGURATION
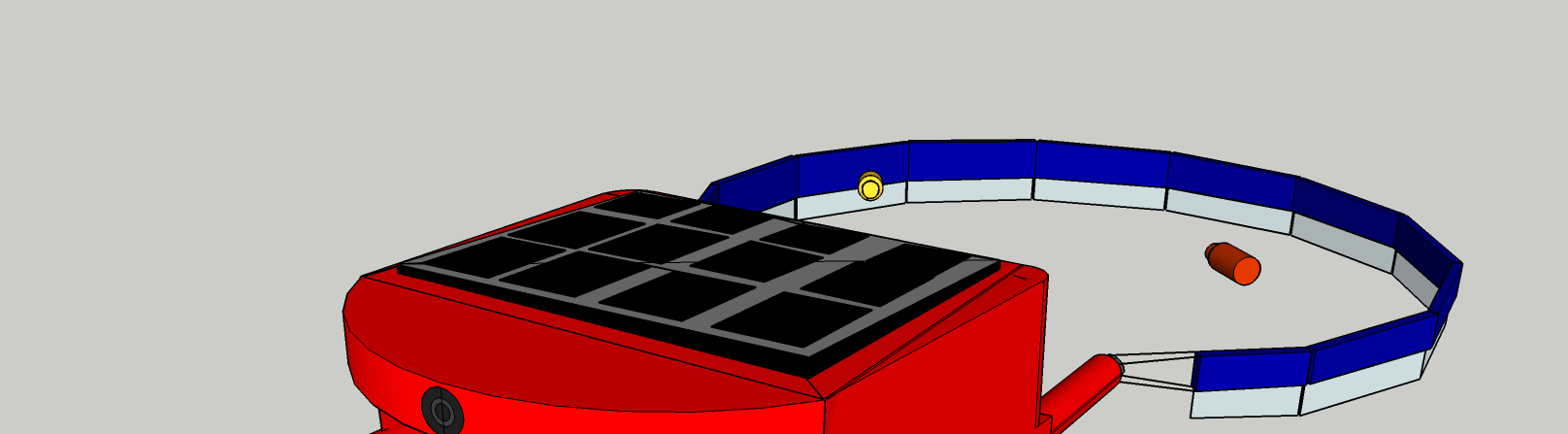
图1示出了船拖曳带有浮标的拦截网。当船移动时,拦截网通过其收集废物。
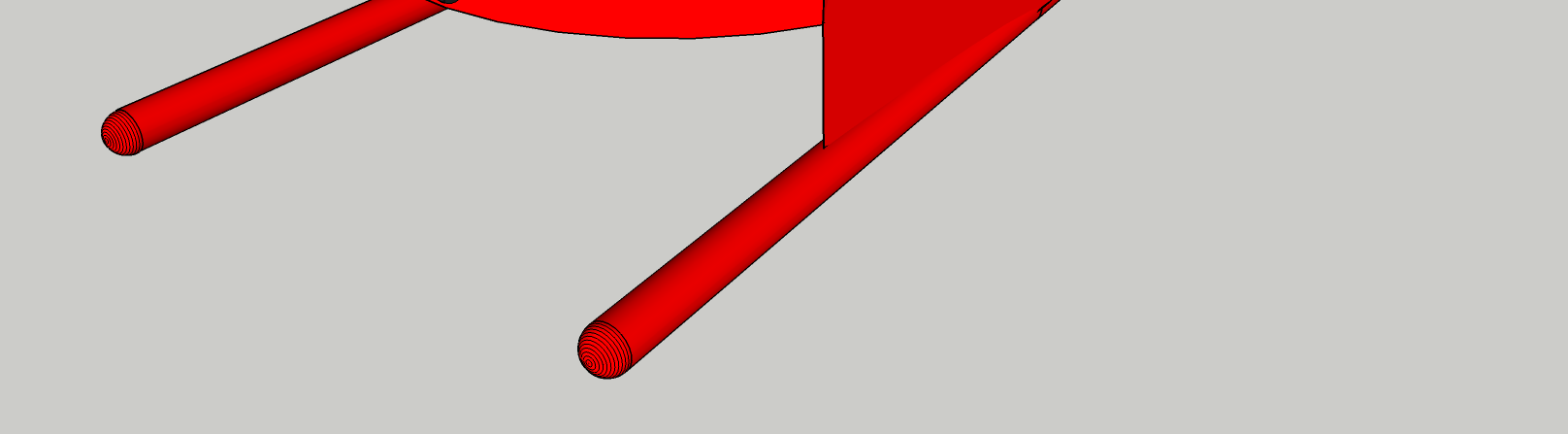
图2显示了提出系统的主框图。船上的主系统是树莓派,负责外设与遥控系统之间的连接。它还处理图像传输、GPS定位系统[4]、数据库及其他任务。Arduino用作低级控制器,控制三种类型的电机。步进电机用于旋转监控摄像头,从而使远程用户设备(UE)显示船上的实时视频。直流电机和电子调速器(ESC)用于驱动推进器,为船提供动力。伺服电机转动推进器[6][7],从而改变船的行驶方向,实现较大的转弯半径。两个推进器的推进安装在船体两侧的推进器可以分别控制,从而使船能够以较小的转弯半径改变方向。
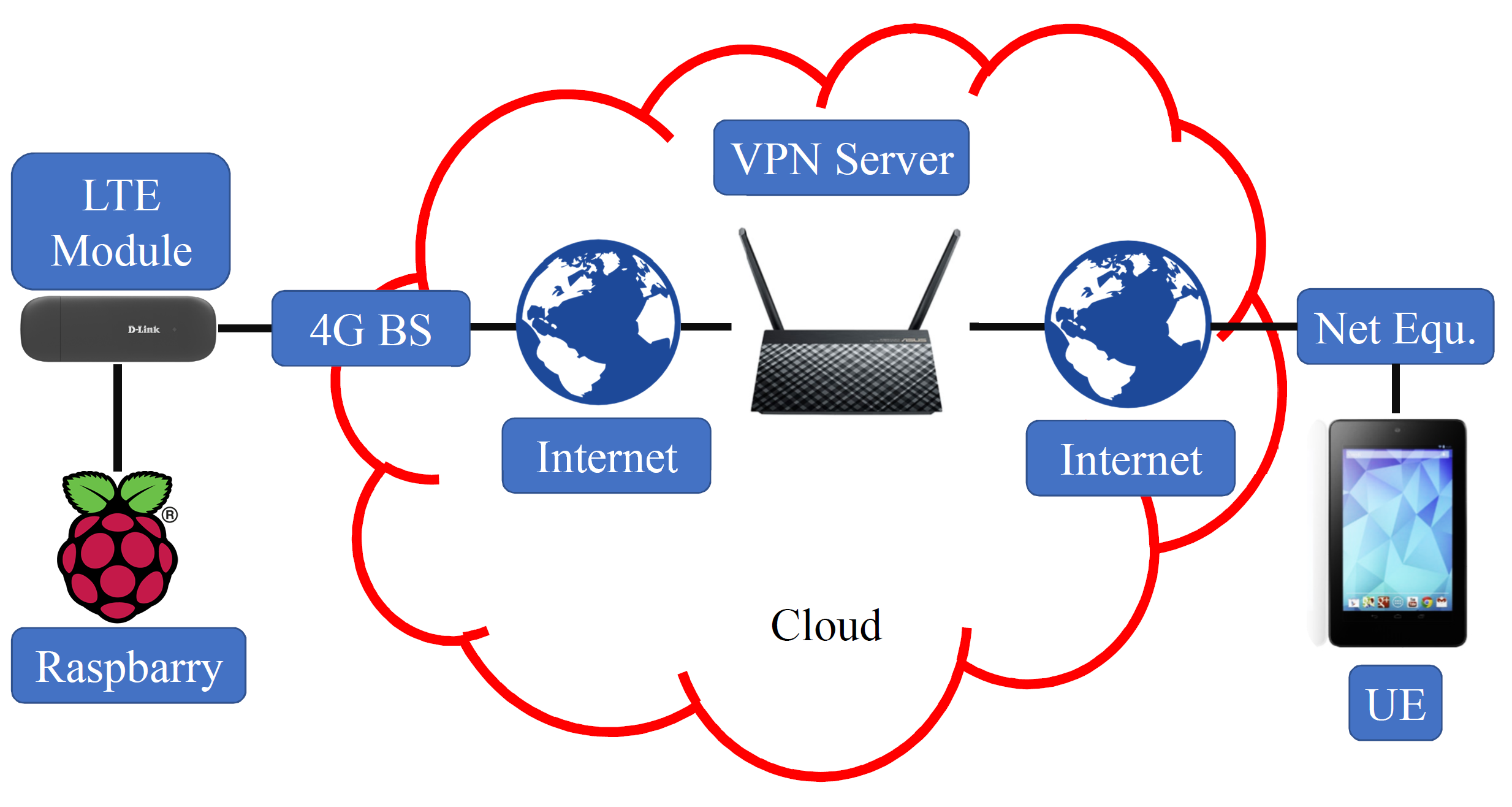
图3显示了提出的系统的通信配置。广泛部署的地面蜂窝系统适用于近岸遥控船。使用虚拟专用网络(VPN)[5],使得船上的LTE(长期演进)模块无需固定IP地址,用户设备(UE)仍可访问树莓派以控制船。
远程用户设备(UE)可以通过船上的GPS(全球定位系统)接收器监控并记录船的位置。船的移动可以通过在远程用户设备(UE)上手动操作控制面板来实现,也可以通过向船发送一组经纬度,使其根据路线规划实现自动导航。远程用户设备(UE)控制系统采用Web架构,适用于iOS、谷歌安卓和微软Windows等多种操作系统。
III. SYSTEM DEMONSTRATION
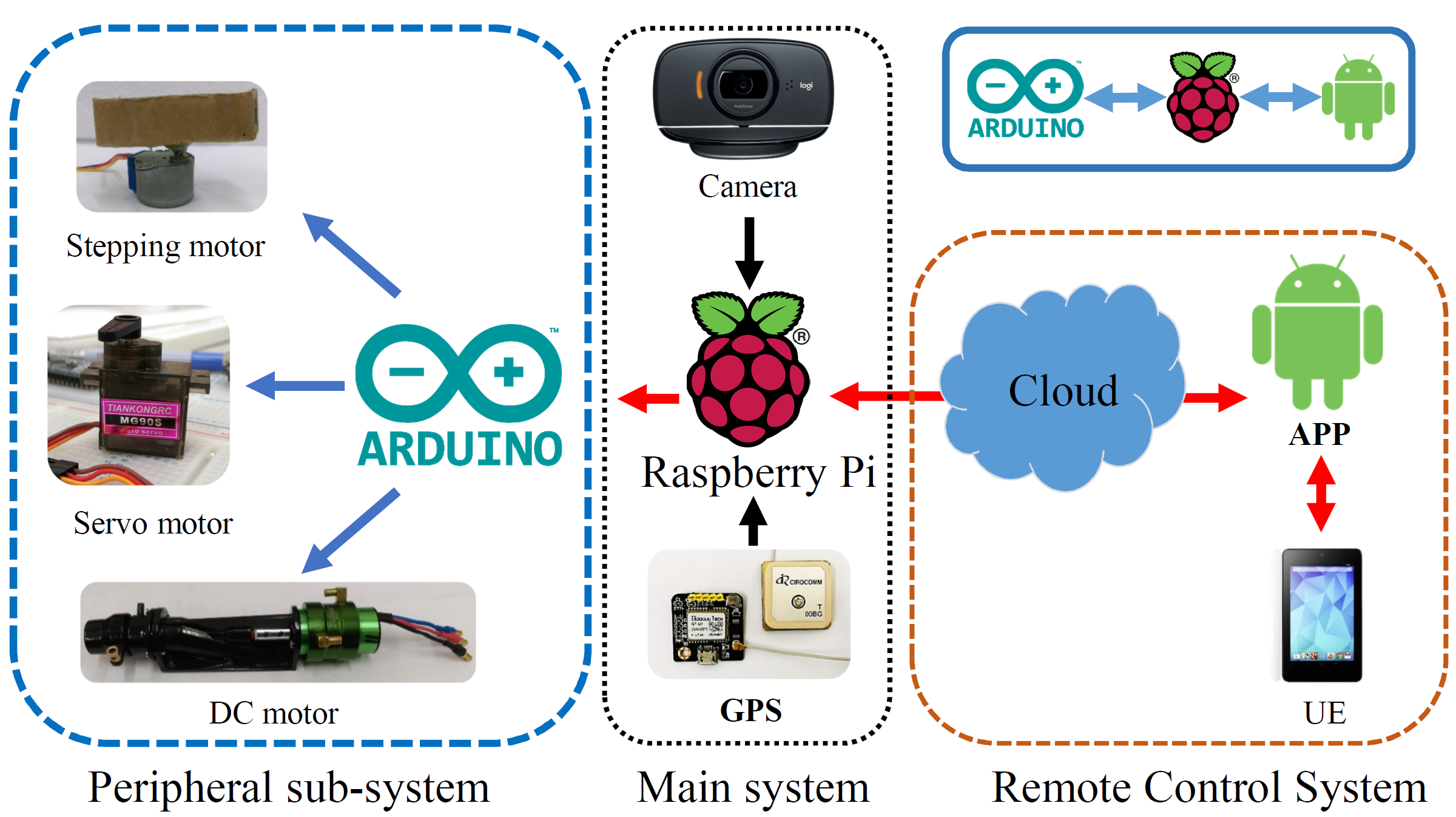
图4展示了在台湾澎湖县西屿近海水域航行并收集漂浮垃圾的开发船只。

图5显示了远程用户设备(UE)上的控制面板。
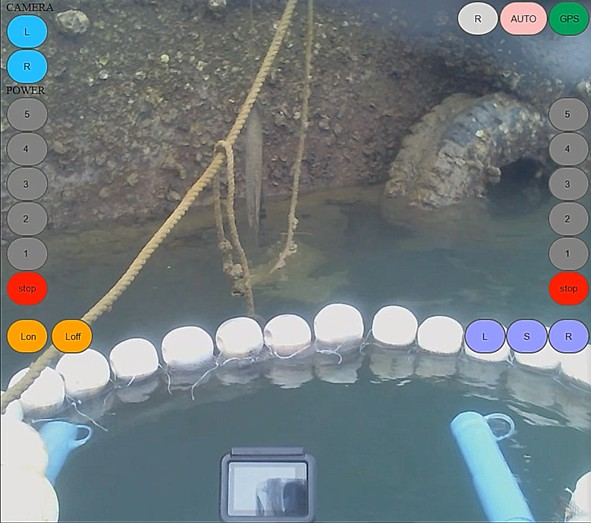
图6显示了谷歌地图上的相关轨迹。
IV. CONCLUSIONS
本工作开发了一种可远程控制的近岸漂浮垃圾收集船。所开发的收集船体积小、低成本且具有浅吃水特性,适用于在浅水区、靠近沙质海岸和礁石区域收集漂浮垃圾。由于采用VPN结构,船上的蜂窝模块无需固定IP地址,且基于Web的远程控制面板使得该船可通过智能手机、平板电脑进行操控。笔记本电脑或台式计算机。辅助太阳能电源有效延长了运行时间。

















 88
88

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









