




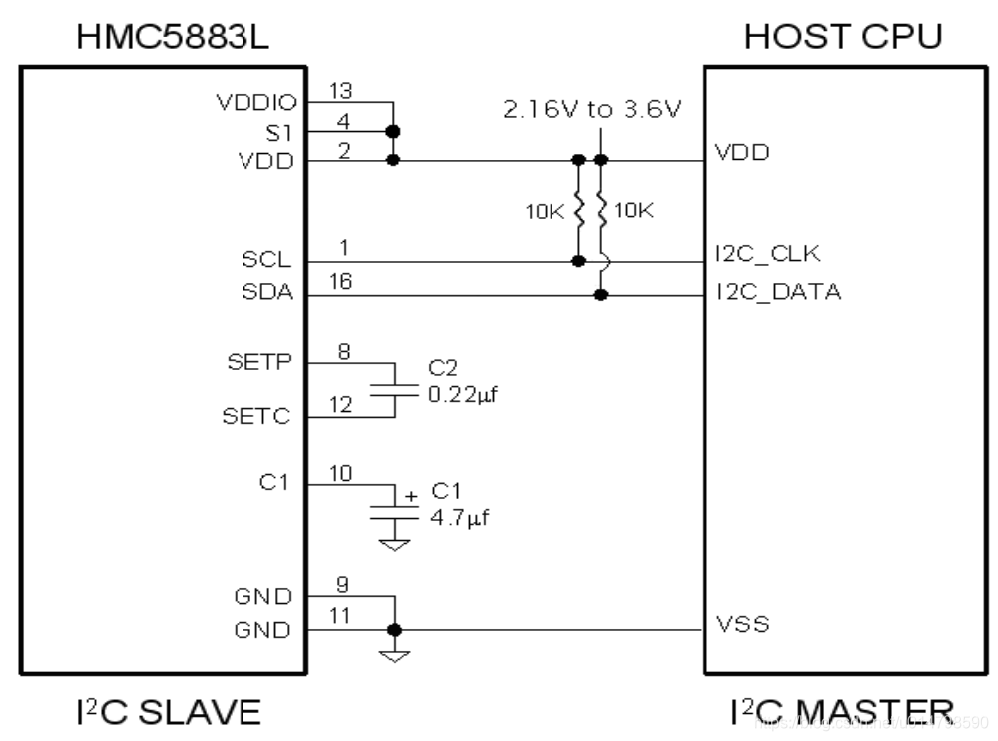
 本文详细介绍了HMC5883磁力传感器的驱动程序设计,包括初始化过程、数据读取方法及角度计算公式。通过单字节写入、读取寄存器和连续读取数据等函数实现对传感器的精确控制。
本文详细介绍了HMC5883磁力传感器的驱动程序设计,包括初始化过程、数据读取方法及角度计算公式。通过单字节写入、读取寄存器和连续读取数据等函数实现对传感器的精确控制。
HMC5883.c
#include "N76E003.h"
#include "Common.h"
#include "Delay.h"
#include "SFR_Macro.h"
#include "Function_define.h"
#include "HMC5883.h"
#include <math.h> //Keil library
#include <stdlib.h> //Keil library
#include <stdio.h> //Keil library
#include <INTRINS.H> //Keil library
#define uchar unsigned char
#define uint unsigned int
#define SlaveAddress 0x3C //定义器件在IIC总线中的从地址
uchar BUF[8];//接收数据缓存区
uchar gew,shiw,baiw,qianw,wanw; //显示变量
double angle;
//int dis_data; //变量
void Init_HMC5883(void); //初始化5883
void WriteDataLCM(uchar dataW);
void WriteCommandLCM(uchar CMD,uchar Attribc);
void DisplayOneChar(uchar X,uchar Y,uchar DData);
void conversion(uint temp_data);
void Single_Write_HMC5883(uchar REG_Address,uchar REG_data); //单个写入数据
uchar Single_Read_HMC5883(uchar REG_Address); //单个读取内部寄存器数据
void Multiple_Read_HMC5883(); //连续的读取内部寄存器数据
//以下是模拟iic使用函数-------------
void HMC5883_Start();
void HMC5883_Stop();
void HMC5883_SendACK(bit ack);
bit HMC5883_RecvACK();
void HMC5883_SendByte(uchar dat);
uchar HMC5883_RecvByte();
void HMC5883_ReadPage();
void HMC5883_WritePage();
//-----------------------------------
void Delay51us() //5us延时(不怎么准)
{
nop;
nop; nop; nop; nop; nop; nop; nop; nop;
nop;
nop; nop; nop; nop; nop; nop; nop; nop;
nop;
nop; nop; nop; nop; nop; nop; nop; nop;
nop;
nop; nop; nop; nop; nop; nop; nop; nop;
nop;
nop; nop; nop; nop; nop; nop; nop; nop;
}
//*********************************************************
void conversion(uint temp_data)
{
wanw=temp_data/10000+0x30 ;
temp_data=temp_data%10000; //取余运算
qianw=temp_data/1000+0x30 ;
temp_data=temp_data%1000; //取余运算
baiw=temp_data/100+0x30 ;
temp_data=temp_data%100; //取余运算
shiw=temp_data/10+0x30 ;
temp_data=temp_data%10; //取余运算
gew=temp_data+0x30;
}
/**************************************
起始信号
**************************************/
void HMC5883_Start()
{
SDA= 1; //拉高数据线
SCL = 1; //拉高时钟线
Delay51us(); //延时
SDA = 0; //产生下降沿
Delay51us(); //延时
SCL = 0; //拉低时钟线
}
/**************************************
停止信号
**************************************/
void HMC5883_Stop()
{
SDA = 0; //拉低数据线
SCL = 1; //拉高时钟线
Delay51us(); //延时
SDA = 1; //产生上升沿
Delay51us(); //延时
}
/**************************************
发送应答信号
入口参数:ack (0:ACK 1:NAK)
**************************************/
void HMC5883_SendACK(bit ack)
{
SDA = ack; //写应答信号
SCL = 1; //拉高时钟线
Delay51us(); //延时
SCL = 0; //拉低时钟线
Delay51us(); //延时
}
/**************************************
接收应答信号
**************************************/
bit HMC5883_RecvACK()
{
SCL = 1; //拉高时钟线
Delay51us(); //延时
CY = SDA; //读应答信号
SCL = 0; //拉低时钟线
Delay51us(); //延时
return CY;
}
/**************************************
向IIC总线发送一个字节数据
**************************************/
void HMC5883_SendByte(uchar dat)
{
uchar i;
for (i=0; i<8; i++) //8位计数器
{
dat <<= 1; //移出数据的最高位
SDA = CY; //送数据口
SCL = 1; //拉高时钟线
Delay51us(); //延时
SCL = 0; //拉低时钟线
Delay51us(); //延时
}
HMC5883_RecvACK();
}
/**************************************
从IIC总线接收一个字节数据
**************************************/
uchar HMC5883_RecvByte()
{
uchar i;
uchar dat = 0;
SDA = 1; //使能内部上拉,准备读取数据,
for (i=0; i<8; i++) //8位计数器
{
dat <<= 1;
SCL = 1; //拉高时钟线
Delay51us(); //延时
dat |= SDA; //读数据
SCL = 0; //拉低时钟线
Delay51us(); //延时
}
return dat;
}
//***************************************************
void Single_Write_HMC5883(uchar REG_Address,uchar REG_data)
{
HMC5883_Start(); //起始信号
HMC5883_SendByte(SlaveAddress); //发送设备地址+写信号
HMC5883_SendByte(REG_Address); //内部寄存器地址,请参考中文pdf
HMC5883_SendByte(REG_data); //内部寄存器数据,请参考中文pdf
HMC5883_Stop(); //发送停止信号
}
//********单字节读取内部寄存器*************************
uchar Single_Read_HMC5883(uchar REG_Address)
{
uchar REG_data;
HMC5883_Start(); //起始信号
HMC5883_SendByte(SlaveAddress); //发送设备地址+写信号
HMC5883_SendByte(REG_Address); //发送存储单元地址,从0开始
HMC5883_Start(); //起始信号
HMC5883_SendByte(SlaveAddress+1); //发送设备地址+读信号
REG_data=HMC5883_RecvByte(); //读出寄存器数据
HMC5883_SendACK(1);
HMC5883_Stop(); //停止信号
return REG_data;
}
//******************************************************
//
//连续读出HMC5883内部角度数据,地址范围0x3~0x5
//
//******************************************************
void Multiple_read_HMC5883()
{ uchar i;
HMC5883_Start(); //起始信号
HMC5883_SendByte(SlaveAddress); //发送设备地址+写信号
HMC5883_SendByte(0x03); //发送存储单元地址,从0x3开始
HMC5883_Start(); //起始信号
HMC5883_SendByte(SlaveAddress+1); //发送设备地址+读信号
for (i=0; i<6; i++) //连续读取6个地址数据,存储中BUF
{
BUF[i] = HMC5883_RecvByte(); //BUF[0]存储数据
if (i == 5)
{
HMC5883_SendACK(1); //最后一个数据需要回NOACK
}
else
{
HMC5883_SendACK(0); //回应ACK
}
}
HMC5883_Stop(); //停止信号
Timer0_Delay1ms(5);
}
//初始化HMC5883,根据需要请参考pdf进行修改****
void Init_HMC5883()
{
Single_Write_HMC5883(0x02,0x00);
}
void EC()//Electronic compass
{
int x,y,z;
// Delay_1ms(500);
Timer0_Delay1ms(500);
Multiple_Read_HMC5883(); //连续读出数据,存储在BUF中
x=BUF[0] << 8 | BUF[1]; //Combine MSB and LSB of X Data output register
z=BUF[2] << 8 | BUF[3]; //Combine MSB and LSB of Z Data output register
y=BUF[4] << 8 | BUF[5]; //Combine MSB and LSB of Y Data output register
angle= atan2((double)y,(double)x) * (180 / 3.14159265) + 180; // angle in degrees
angle*=10;
conversion(angle); //计算数据和显示
}
HMC5883.h
#ifndef _HMC5883L_h_
#define _HMC5883L_h_
extern unsigned char gew,shiw,baiw,qianw,wanw;
extern double angle;
void EC();//Electronic compass
void Init_HMC5883();//初始化程序,放在大循环前
#endif

















 1735
1735

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









