




1. 引言
无刷直流电机(BLDC)因其高效率、高功率密度和长寿命等优点,在工业控制、汽车电子和家电等领域得到了广泛应用。然而,传统的六步换相控制方法存在转矩脉动大、噪声明显等缺点。磁场定向控制(FOC)技术的出现,使得BLDC电机能够实现类似直流电机的平滑控制性能,成为高性能电机控制的主流方案。
本文将从BLDC电机的数学模型出发,深入剖析FOC控制的原理和设计过程,为工程师提供一套完整的理论分析和实践指导。
2. BLDC电机数学模型
2.1 基本结构和工作原理
BLDC电机本质上是一种永磁同步电机,其转子采用永磁体,定子为三相绕组。与有刷直流电机不同,BLDC通过电子换相实现磁场旋转,从而驱动转子转动。
三相绕组的电压方程可表示为:
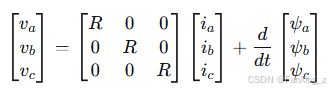
其中,为相电压,
为相电流,
为相电阻,
为各相磁链。
2.2 磁链方程
各相磁链由自感、互感和永磁体磁链共同决定:
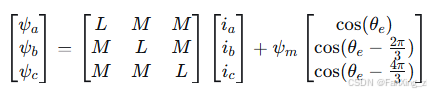
其中,为自感,
为互感,
为永磁体磁链幅值,
为电角度。
2.3 转矩方程
电磁转矩由磁共能对机械角度的偏导数得到:
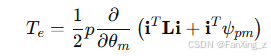
其中,为极对数,
为机械角度。
经过推导,电磁转矩可简化为:

2.4 运动方程
电机运动遵循牛顿第二定律:
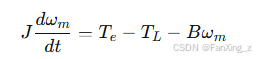
其中,为转动惯量,
为机械角速度,
为负载转矩,
为阻尼系数。
3. 坐标变换理论
3.1 Clarke变换
Clarke变换将三相静止坐标系ABC转换为两相静止坐标系:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1249
1249

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











