



 本文详细介绍了Android Studio中的调试方法,包括两种debug模式、断点设置与管理、断点跳转及逐步调试等核心功能,帮助开发者高效定位与解决问题。
本文详细介绍了Android Studio中的调试方法,包括两种debug模式、断点设置与管理、断点跳转及逐步调试等核心功能,帮助开发者高效定位与解决问题。
AndroidStudio(Debug)调试
最近使用Android studio调试的比较多,记录一下
1、debug的两种模式
-
重新开始的debug(从启动开始)

-
插入式的debug(从当前页开始)

2、插入断点
如果已经在debug的模式下,还未执行到的行,可以在下面插入一个断点
其他的也就一样了
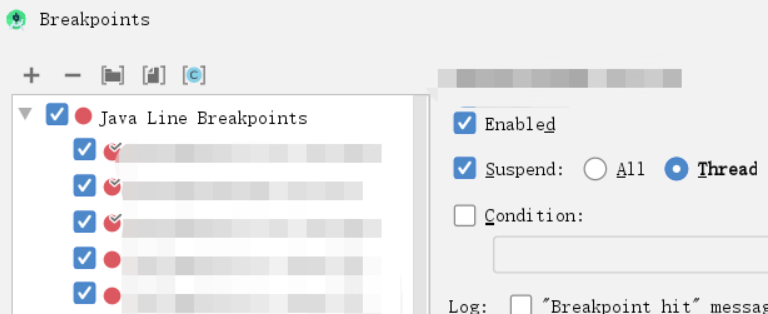
3、查看,屏蔽断点

-
查看所有断点(上面的两个红豆),同时也可以选择关掉某一个breakpoint
-
上面的红豆带一个斜杠,
 >可以不在该处停止,继续执行
>可以不在该处停止,继续执行
-
单个断点屏蔽(右键代码左边的红豆,可单独关闭)

enable: 就是去掉这个断点,不会在这里挺住
suspend: 挂起(没怎么用过)
4、断点的跳转

这个按钮,可以从当前断点跳到下一个断点
5、一步步的调试

- 第一个,直接下一步
- 第二个,进入该方法
- 第三个,强制进入
- 第四个,退出该方法
差不多了,基本就是这个样。功能点基本常用的就这么多。

















 7189
7189

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









