



1. 智能汽车测试的可靠性挑战与新时代需求
"软件定义汽车"与智能驾驶技术的发展,使HIL测试成为保障功能安全、质量及合规的核心环节。测试系统的不稳定、性能瓶颈或中断将直接导致:
-
项目周期延长:测试中断需重新执行,拖慢研发进度;
-
成本攀升:台架与被测设备闲置造成资源浪费;
-
潜在安全风险:实时性不足或数据错误可能遗漏深层缺陷。
市场亟需兼具高性能、高可靠性和自主可控的HIL系统底座,以支撑严苛且连续的测试需求。
2. 飞行控制仿真对HIL系统的极限要求
航空航天与国防工业代表了HIL技术的最高标准。飞行控制系统仿真对平台提出如下要求:
-
微秒级实时性与确定性:纳秒至百微秒级闭环仿真周期周期,严禁时序抖动超时;
-
极限可靠性:支持7×24小时不间断运行,适应振动、宽温等严苛环境;
-
多协议异构处理能力:同步处理航电总线、传感器群与复杂动力学模型;
-
全链路自主可控:核心技术及供应链需满足安全与可信要求。
满足以上标准的平台,其性能与鲁棒性远超普通工业应用。
3. 技术共享:航空与汽车领域的共性技术基础
智能汽车HIL测试与飞控测试在技术基础上具有重要共性,且在可靠性要求上高度一致:
| 技术需求 | 飞行控制HIL | 智能汽车HIL | 技术共享价值 |
|---|---|---|---|
| 可靠性/稳定性 | 国家安全级要求 | 功能安全与财产保障 | 同等重要,标准统一 |
| 实时性能 | 纳秒至百微秒级周期 | 纳秒至百微秒级周期 | 性能全面覆盖 |
| I/O处理能力 | 多类航电总线 | CAN FD/车载以太网/LIN | 协议兼容,能力适配 |
| 自主可控 | 必需 | 供应链风险规避需求 | 完整支持 |
研华的技术平台既满足航空领域的极端要求,也完全适配汽车行业的测试需求,为智能汽车提供经过最高标准验证的可靠性保障。
4. 高性能实时系统架构

4.1 计算平台
采用高性能多核处理器,支持复杂车辆与环境模型;无风扇与宽温设计保障长期连续稳定运行。分为嵌入式实时仿真平台: UNO-348,19”机箱多槽高性能实时主机,支持上千点IO仿真和图形工作站实时机:支持GPU图形渲染。并支持多种IO类型。
4.2 实时性与确定性保障
支持Linux with Preempt-RT等实时操作系统,实现百微秒级响应;硬件与驱动优化确保数据路径低延迟、低抖动;可定制FPGA实现纳秒级闭环。
4.3 I/O生态体系
提供完整系列的CAN/CAN FD、车载以太网(TSN)、LIN、FlexRay通信板卡,及高精度模拟/数字卡,全面满足信号接口与故障注入需求。

4.4 软件集成支持
支持与MATLAB/Simulink、MWorks、OpenModeLica、Unity3D等国内外主流工具链无缝集成,保障技术开放性与灵活性。
5. 实证案例:某飞行控制系统高可靠性仿真验证

项目背景:
国内某航空航天研究所需为其新型飞控系统开发HIL测试平台,用于极端工况下的算法验证。
核心要求:
-
仿真周期≤200微秒;
-
无故障连续运行数百小时;
-
处理多类专用航空总线。
研华方案:
-
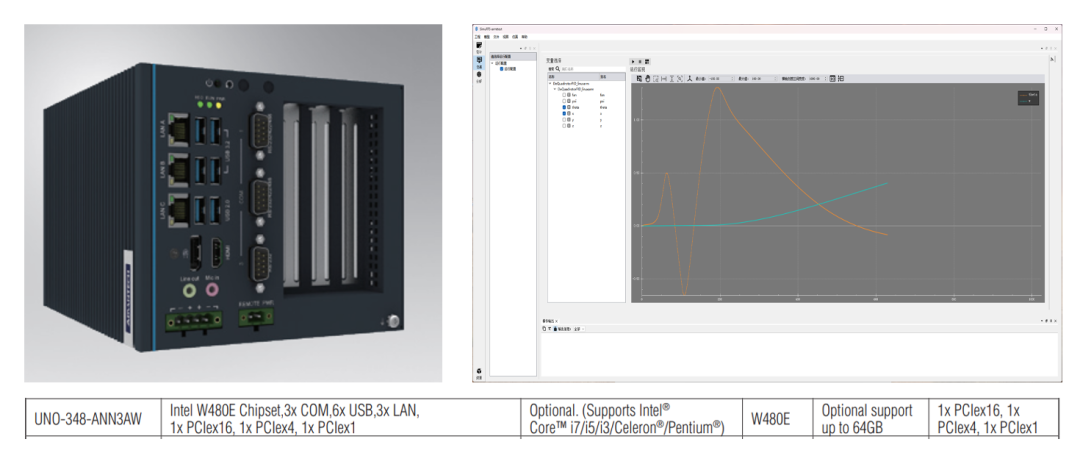
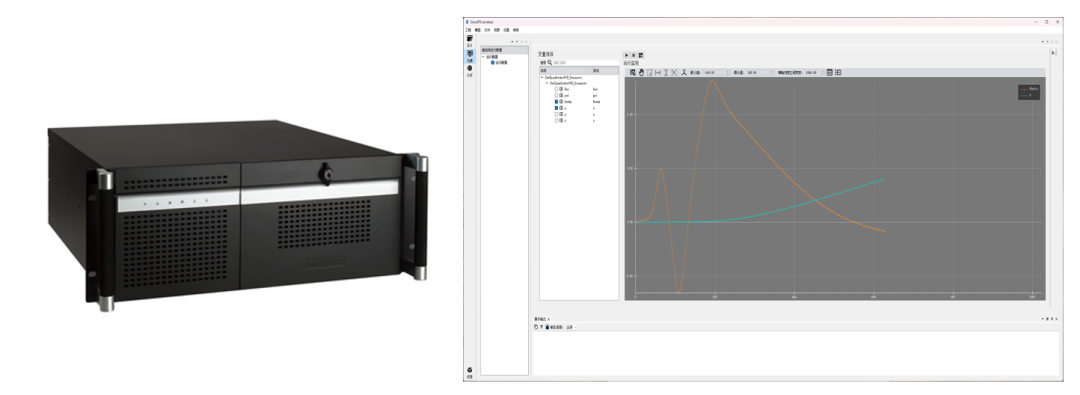
核心采用高性能实时机UNO-348-ANN3AW
-
搭配PCIE-1682FD多通道CAN/FD卡
-
搭配PCIE-1812编码器和多功能IO卡仿真飞行姿态与飞行器性能
-
集成合作方飞控模型与实时管理软件。
仿真功能:
1. 基础气动模型
-
升力/阻力特性建模:
-
基于翼型数据库(NACA系列/自定义翼型)的α-β-Mach数三维插值
-
动态失速模型(Leishman-Beddoes方法)
-
控制面效应:舵面偏转-气动力矩的非线性映射(含铰链力矩迟滞效应)
-
多舵面耦合干扰系数矩阵
2. 飞行器运动方程
-
平移动力学/转动动力学
-
耦合效应建模:惯性耦合(如固定翼飞机的滚转-偏航耦合)
-
螺旋桨滑流对机翼气动的影响(动量理论+CFD修正系数)
3. 高逼真环境仿真
| 环境类型 | 建模方法 | 典型测试场景 |
|---|---|---|
| 大气紊流 | Dryden频谱模型+瞬态风切变 | 航母着舰时的舰尾紊流测试 |
| 结冰条件 | 机翼积冰导致的气动系数动态衰减模型 | 适航认证中的结冰状态失控预防 |
| 发射/分离扰动 | 多体动力学耦合(导弹与载机分离瞬态) | 无人机集群发射的轨迹安全性验证 |
实现成果:
-
仿真周期稳定达到≤180微秒;
-
系统无故障运行时间超1000小时;
-
成为该所飞控研发的核心测试设施。
6. 汽车行业应用场景与核心价值

智能驾驶域控制器HIL仿真
高算力与高确定性保障多传感器数据注入与融合算法稳定运行,提升测试可信度。
-
环境感知模型:摄像头、激光雷达、毫米波雷达等传感器的数字孪生模型,模拟真实环境下的目标检测、分类、跟踪与测距。
-
高精地图与定位模型:模拟GPS/IMU/RTK等定位方式,以及高精地图数据的匹配与更新。
-
决策规划模型:路径规划(全局与局部)、行为决策(如跟车、变道、超车、停车等)逻辑的建模与验证。
-
车辆动力学接口模型:将智能驾驶的控制指令(如加速、制动、转向)传递到底盘执行机构,实现闭环控制。

底盘与动力系统HIL仿真
底盘域负责车辆的行驶、转向、制动与悬挂控制,其仿真模型主要包括:
-
车辆动力学模型:
-
7自由度或14自由度整车模型(包含车身、四个车轮、悬挂、转向、制动等)
-
考虑非线性轮胎模型(如Magic Formula)、空气阻力、滚动阻力等
-
-
底盘执行机构模型:
-
制动系统(包括ABS、ESC、再生制动等)
-
转向系统(电动助力转向EPS、线控转向SBW)
-
悬挂系统(被动/半主动/主动悬挂)
-
驱动系统(电驱动/内燃机,含扭矩分配、四驱控制等)
-
-
底盘域控制器模型(如CDC、ESP、EPS控制器)
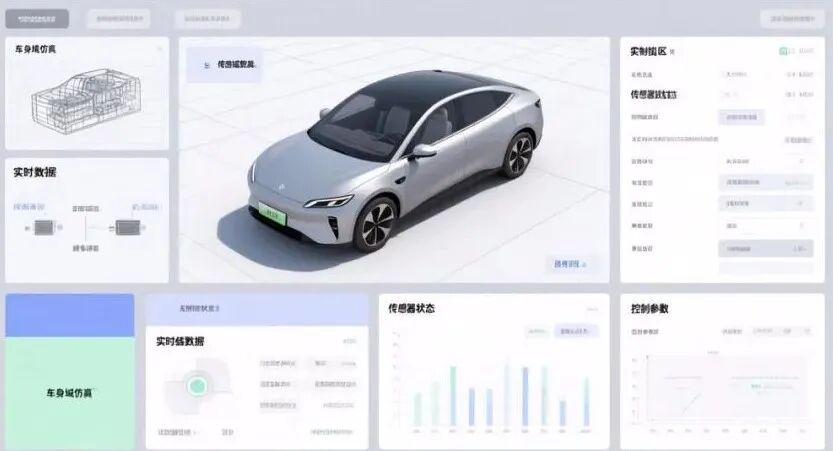
车身域HIL仿真
车身域主要负责车内环境控制、车身电子电气功能与安全,其仿真模型包括:
-
车身控制模块(BCM)模型:如车门控制、车窗控制、灯光控制、后视镜调节等
-
舒适与便利系统模型:空调系统、座椅调节、仪表显示等
-
车载网络通信模型:CAN/LIN/FlexRay/Ethernet等总线通信仿真,验证信号交互与网络负载
-
安全与安防系统模型:如中央门锁、防盗系统、碰撞检测、气囊控制(Airbag ECU)、电池管理系统(BMS)等
-
热管理与能量管理:整车热系统、电池热管理、座舱气候控制等模型的仿真

已关注
关注
重播 分享 赞
关闭
观看更多
更多
退出全屏
切换到竖屏全屏退出全屏
智能制造预测性维护与大数据应用已关注
分享视频
,时长06:49
0/0
00:00/06:49
切换到横屏模式
继续播放
进度条,百分之0
播放
00:00
/
06:49
06:49
全屏
倍速播放中
0.5倍 0.75倍 1.0倍 1.5倍 2.0倍
超清 流畅
您的浏览器不支持 video 标签
继续观看
从天空到道路:国产高性能HIL系统助力军工飞控与智能汽车仿真测试!
观看更多
原创
,
从天空到道路:国产高性能HIL系统助力军工飞控与智能汽车仿真测试!
智能制造预测性维护与大数据应用已关注
分享点赞在看
已同步到看一看写下你的评论
7. 总结
智能汽车HIL测试正面临可靠性、实时性与安全性的全面挑战。研华将历经航空军工验证的实时计算技术引入汽车领域,为客户提供:
-
经过最高标准验证的可靠平台;
-
开放灵活、避免绑定的集成生态;
-
全生命周期成本更优的解决方案。
研华高性能实时系统致力于为智能驾驶研发提供经过航空领域验证的可靠性保障,助力汽车产业安全、高效迈向未来。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









