



“
软件定义汽车时代,汽车由机械终端,逐渐走向移动电子终端。新能源汽车智能化、可扩展、可持续迭代的特点,是车企从面向功能开发转为平台化的开发方式。其中对于测试的要求增多,但时间更短。在这个背景下,具有低成本、可重复、更贴近实际的硬件在环测试(HIL)的重要性进一步增强。
”

01
为什么要进行汽车HIL测试?
灵活、快速适应不断变化的环境的需求越来越被重视。由于极端场景难以复现、在动力总成复杂度越来越高、车辆测试矩阵不断增加的情况下,对原型车在真实环境下测试造成不少挑战。为标定和验证加入半实物仿真测试系统是一个显而易见的解决方案。
相对于传统台架测试,使用HIL测试会带来一系列优势:
1) 丰富的测试功能
当部件或者系统在真实环境条件下测试时(例如:车辆驾驶测试中),许多外部因素诸如天气、驾驶风格、路线细节等,复杂的极限工况都可以在HIL测试中模拟仿真出来,可以很方便的进行浮现各种系统的故障类型
2) 实现早期测试
某个新部件或者新系统的开发经常有未完成的产品要测试。然而为了检查早期的系统模型或零部件,缺失的部分或环境条件可以被模拟。例如:ECU开发中经常没有目标硬件可用。为了优化调节和控制算法,目标硬件可以使用HIL仿真。
3) 测试平台复用性
对于不同型号的ECU,用HIL测试都是非常高效的;并且可以利用分布式IO对多个ECU进行实时的联合测试,而且HIL测试还具有良好的拓展性。因此只要外部因素可以被仿真,确切的重复性和系统性变化是可以实现的。
4) 高效的自动化测试
HIL测试与其他几种测试相比,更加标准化也更加客观,并且其测试用例库可重复使用。此外,实际的测试系统实验例如汽车工业和航空航天上的测试通常非常耗时而且需要较高成本。因此,在开始实际测试之前,利用仿真模拟实际工况然后确定最佳性能是非常有必要的。
5) 安全性较高
在一个危险性较高的测试环境下,HIL仿真可使测试更加安全地进行。例如:测试车辆时,司机或宇航员可能接触到潜在的高风险。同样,被测试的BMS(Battery Management System)也可能被暴露在不必要的危险中,而HIL仿真可以保护人员和物资。

02
HIL测试由哪几个部分组成?
HIL测试系统由实时处理器、I/O接口和操作界面三个主要组件组成。
-
实时处理器是HIL测试系统的核心,它负责HIL测试系统中大多数组件的确定性执行,例如硬件I/O通信、数据记录、激励生成和模型执行。实时系统通常用于精确仿真系统中无法进行实体测试的部分。
-
I/O接口是指与待测设备交互的模拟、数字和总线信号,可用于生成激励信号,采集数据以便进行记录和分析,并提供受测电子控制单元(ECU)与模型所仿真的虚拟环境之间的传感器/执行器交互。
-
操作界面通过与实时处理器通信来提供测试命令和实现可视化。通常,该组件还负责配置管理、测试自动化、分析和生成任务报表。
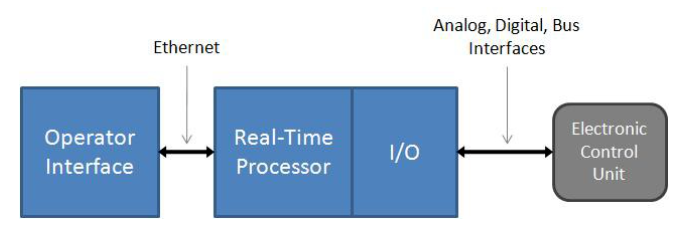
HIL测试系统组成图
03
凯云ETest平台具有哪些优势?
HIL测试好处多多,但搭建一个兼顾成本和性能的HIL系统并不容易。凯云ETest采用分层的上下位机的运行架构,可支持分布式部署,实现单机、多机环境下的测试系统开发。
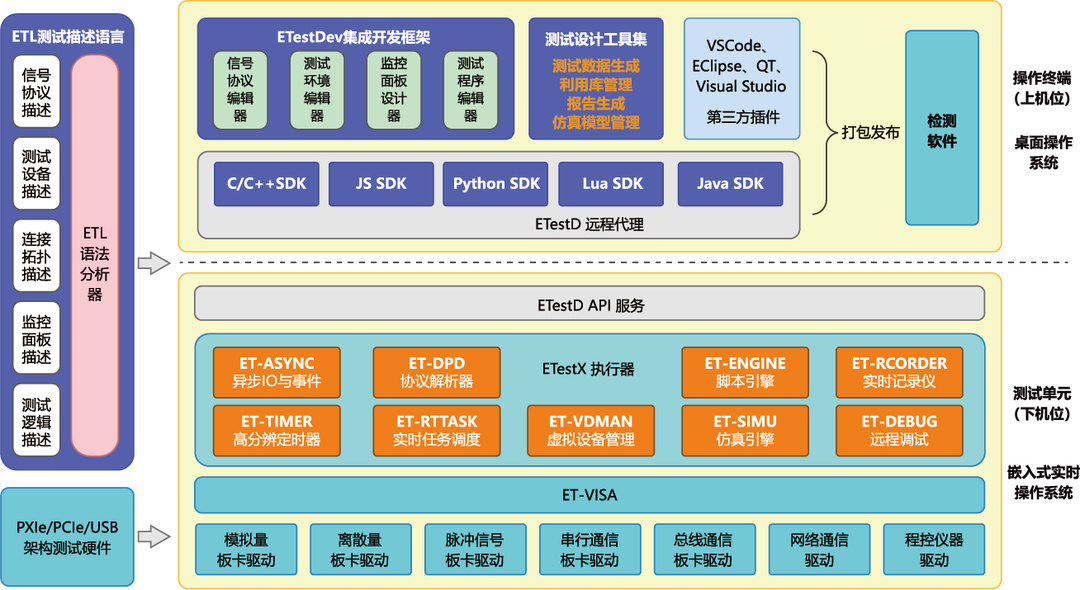
ETest系统框架
ETest是国内首款面向测试系统开发的集成开发环境,解决了装备软件嵌入式软件半实物仿真测试环境构建的难题,可以快速开发出满足装备嵌入式软件研发阶段、验收阶段、试验验证阶段所需要的各类仿真测试系统,提高产品的研发效率,提升产品的研发质量。ETest突破了测试领域描述语言设计与开发、系统逻辑可视化建模与执行、测试资源规划与测试数据生成优化、测试执行引擎异步循环调度、可扩展测试系统架构、跨平台运行与产品封包等多项关键技术。
ETest测试解决方案优势:
Ⅰ.首个测试行业领域化描述语言及其开发环境
通过交联环境、信号与协议、逻辑时序、行为状态等程序化的描述,可以实现测试系统领域化专用语言,解决长期以来测试行业依托国外相似产品或通用程序语言开发测试系统周期长、成本高的问题。开发环境具有语法高亮显示、代码提示、自动补全、语法检查、断点调试等智能化辅助开发的功能,可以在该集成开发环境下完成测试系统的开发和部署,大幅缩短了产品上市的时间。
Ⅱ.首个提出和实现的支持分布式部署执行的开发环境
本平台采用上下机的设计,上位机运行桌面操作系统程序,下位机运行实时操作系统程序,上下位机的结构就兼顾了灵活方便性与实时确定性两方面的需求。测试脚本既可以采用C/C++、Lua等实时性优良的测试脚本开发语言,也可以采用Python、JavaScript等非实时性测试脚本语言,还可以进行各类脚本的混合编程,实现测试程序的快速开发。开发完成后的测试脚本指定所运行的执行器,多个执行器可组成分布式运行环境,通过上位机测试监控实现多执行器的并行调度。
Ⅲ.首个与ATML实现完全对标的半实物仿真测试环境
本测试平台将ATS领域的STD、IVI、TPS等理念应用于HIL的设计和开发中,形成了由仿真交联环境和信号协议描述组成的仿真测试需求到测试资源与设备映射的系统架构模式,实现了与ATML标准的全面对标,不仅可以完成针对被测系统的测试测量分析任务,更为重要的是能支撑用户完成分布式仿真测试任务。
Ⅳ.首个支持可视化建模与语言化编辑双向处理的平台
本测试平台不仅提供了具有较强功能的程序文本编辑器,也提供了交联环境建模、因果图建模、状态机建模、协议与信号表格化建模等可视化编辑工具,可以实现可视化建模与程序文本编辑的双向处理,无论是对于专业的程序开发人员还是对于专业的测试设计人员都非常友好。
Ⅴ.首个可以为通用IDE生成插件应用的测试平台
本测试平台将交联环境建模、协议与信号描述、测试设备与交联环境的绑定映射、可视化监控界面设计等测试设计功能所形成的测试方案统一打包为一个插件包,该插件包可支持在Visual Studio、Visual Code等通用IDE环境中集成,使得测试开发人员可以在自己熟悉的IDE环境中开发测试脚本代码。
04
凯云ETest汽车行业典型案例
半实物仿真测试开发环境ETest可以满足SIL、HIL、VIL阶段测试软件开发需求,参与到智能网联汽车的动力域、底盘域、车身域、座舱域、驾驶域的研制过程中,能够支撑用户探索并掌握域控系统软硬件架构、控制策略、故障诊断等一系列关键技术,为保障域控系统的研发质量发挥作用。
![]()
汽车集控屏测试系统
![]()
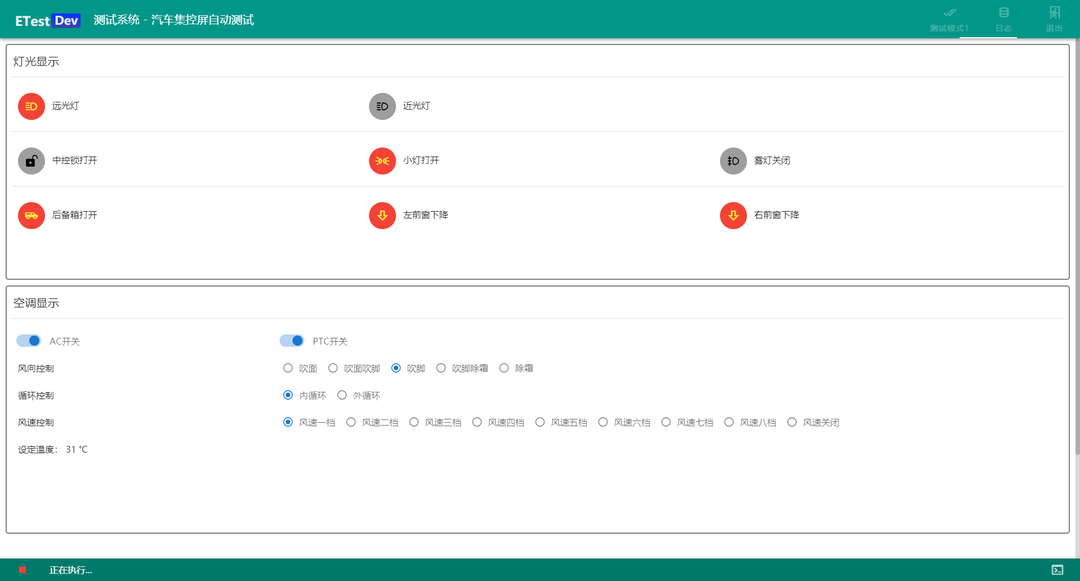
【项目简介】
本系统通过CAN总线模块模拟空调控制器、车身控制模块、电池管理单元与汽车集控屏系统的信息交互,实现如下功能:
1)接收并显示空调的状态信息,对空调进行控制;
2)接收并显示车身的状态信息;
3)对车辆的灯光、车窗进行控制,并显示状态信息;
4)电动汽车充电时,显示车辆的充电信息;
5)提供基本车载娱乐功能:音乐、导航等。
![]()
电动助力转向系统测试
![]()
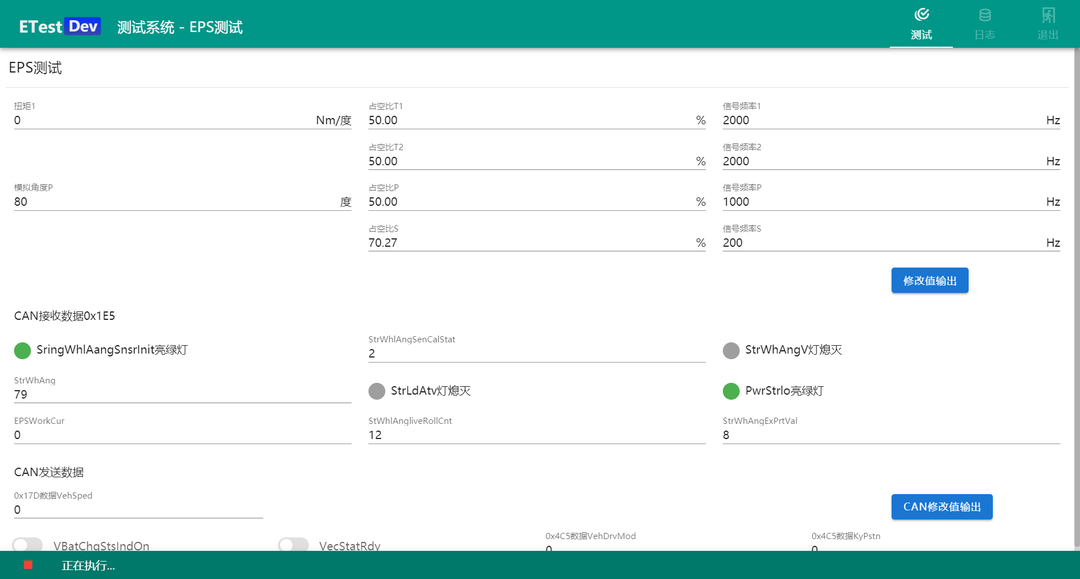
【项目简介】
1)本系统通过PWM板卡模拟Hella传感器输出信号(方向盘扭矩1信号、方向盘扭矩2信号、方向盘转角信号、方向盘转角信号),电动助力转向系统(EPS)基于输入的Hella传感器信号,输出CAN总线控制信号。
2)本系统通过CAN总线板卡采集EPS输出的CAN总线信号,并判断控制逻辑是否正常。
![]()
塔式起重机安全监控系统测试设备
![]()

【项目简介】
本测试设备通过模拟高度传感器、幅度传感器、重量传感器、回转传感器的输出信号给起重机安全监控系统。安全监控系统在收到上述数据的同时在其屏幕上显示接收到的数据,并按照预设的时间间隔通过串口把上述信息上报给测试设备。
DGKZ/灯光控制器测试设备

【项目简介】本设备通过模拟灯光控制器所需的开关量信号,对灯光控制逻辑进行验证,主要实现如下具体功能如下:
1) 顶灯控制验证;
2) 远光灯控制验证;
3) 近光灯控制验证;
4) 左右转向灯控制验证;
5) 后雾灯控制验证;
6) 位置灯、示廓灯和开关照明灯控制验证;
7) 制动灯和防空制动灯控制验证;
8) 防空灯控制验证;
9) 倒车灯控制验证;
10)双闪灯控制验证。

















 4137
4137

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









