



 文章介绍了如何使用ETest对电动助力转向系统(EPS)进行测试,涉及内容包括系统接口、测试环境搭建(如工控机、PWM信号和CAN总线接口的选用)、测试项目设置以及UI界面设计,旨在通过模拟信号和通信协议来验证EPS控制器的功能和性能。
文章介绍了如何使用ETest对电动助力转向系统(EPS)进行测试,涉及内容包括系统接口、测试环境搭建(如工控机、PWM信号和CAN总线接口的选用)、测试项目设置以及UI界面设计,旨在通过模拟信号和通信协议来验证EPS控制器的功能和性能。
电动助力转向系统以其简单、有效、安全、环保和易于控制等特点受到重视,应用范围越来越广。就性能方面而言,电动助力转向系统便于调校,能够提供多种转向感觉,能够在特定工况下提供特定的输出,同时可以为整车高级功能提供接口。EPS的出现可以实现以往传统转向系统无法实现的适宜的转向感觉,但在开发过程中如何进行测试和调整,有效指导电动助力转向系统的设计,已成为国内外EPS开发迫切需要解决的问题。
本文主要介绍基于ETest实现电动助力转向系统测试案例~
,时长05:12
▲ 基于ETest的电动助力转向系统测试演示
01
待测系统介绍
EPS控制器通过CAN收发器接收获取车速信号,根据传感器采集的方向盘扭矩、方向盘转角等信号,控制电机产生转向助力。
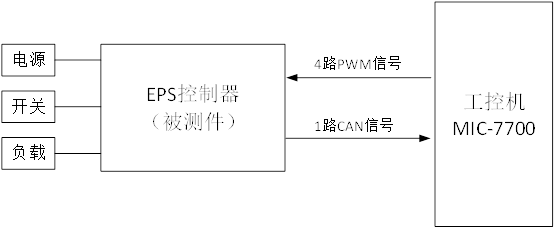
图1:系统组成关系图
1. 接口情况
1)脉冲输出信号
共4路,包括:方向盘扭矩1信号T1,方向盘扭矩2信号T2,方向盘转角信号P,方向盘转角信号S。
2)CAN口
用来与车身进行信息交互。
2. 模拟Hella传感器信号输出
02
测试环境搭建
1. 硬件选型
1)测试主机:工控机MIC-7700
2)PWM信号:PCI-1780U,8路PWM输出;
3)CAN总线接口:PCI-1680U,2路CAN总线接口。
2. 测试环境搭建
1)测试主机
使用MIC-7700工控机作为测试主机,并将PCI-1780U和PCI-1680U板卡安装在工控机上。
2)PWM信号输入:4路PWM信号
使用PCI-1780U板卡的4路PWM输出接口分别与EPS控制器的4路传感器信号输入端连接,用于模拟4路传感器信号。
3)CAN接口
使用PCI-1680U板卡的CAN接口与EPS控制器的CAN总线接口连接,模拟EPS与外部设备的通信。
4)测试环境示意图
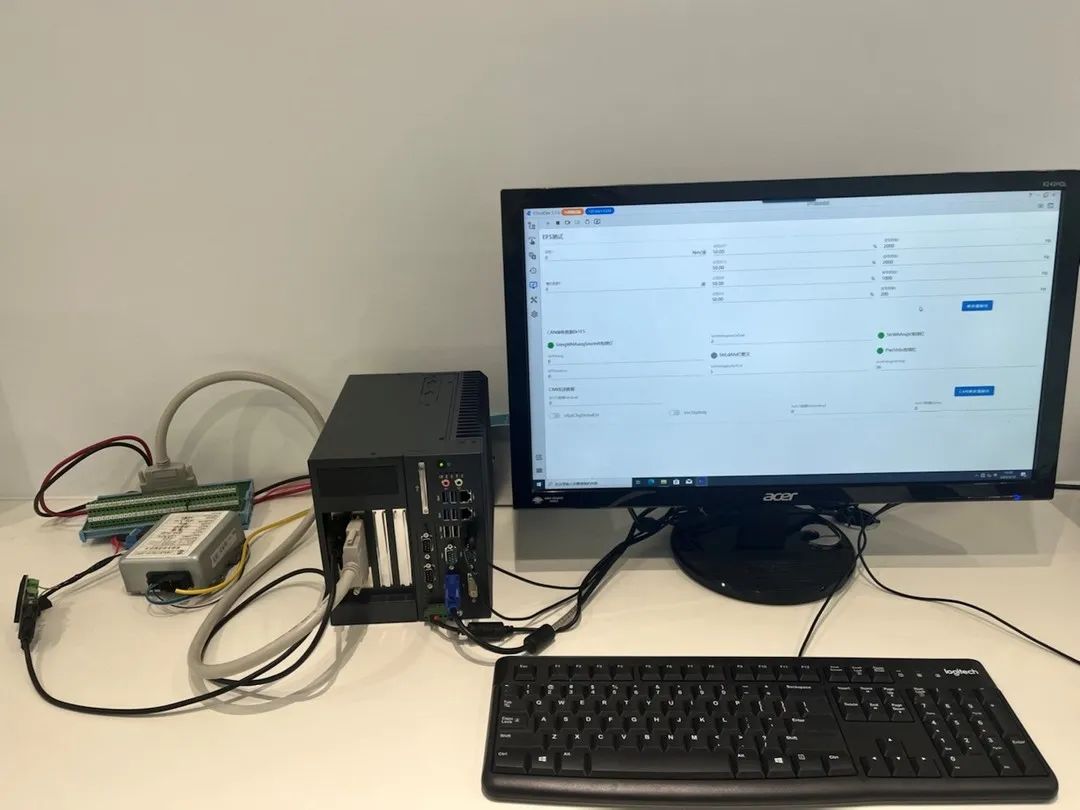
图2:测试环境示意图
03
测试项目
1. 测试环境
创建测试设备和被测设备,给测试设备添加通道:
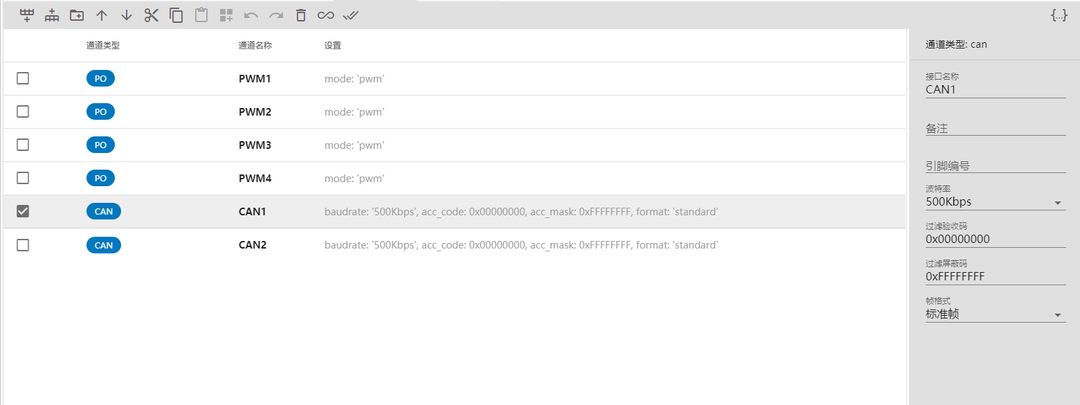
图3:测试设备
创建连接拓扑图:
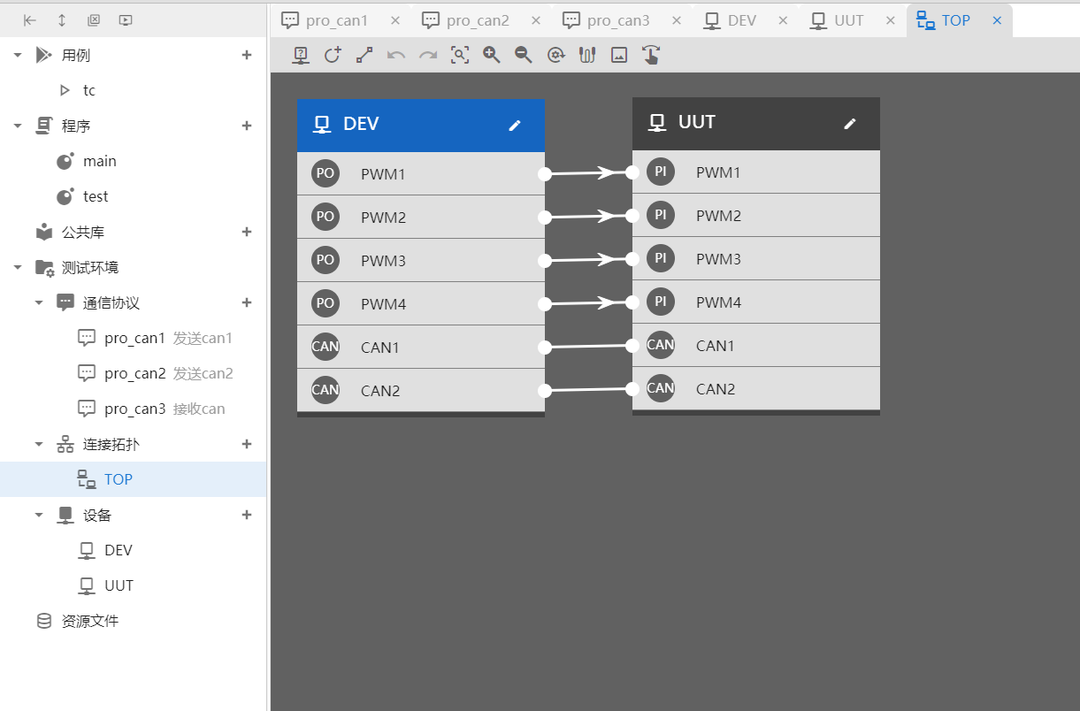
图4:连接拓扑
创建通信协议:
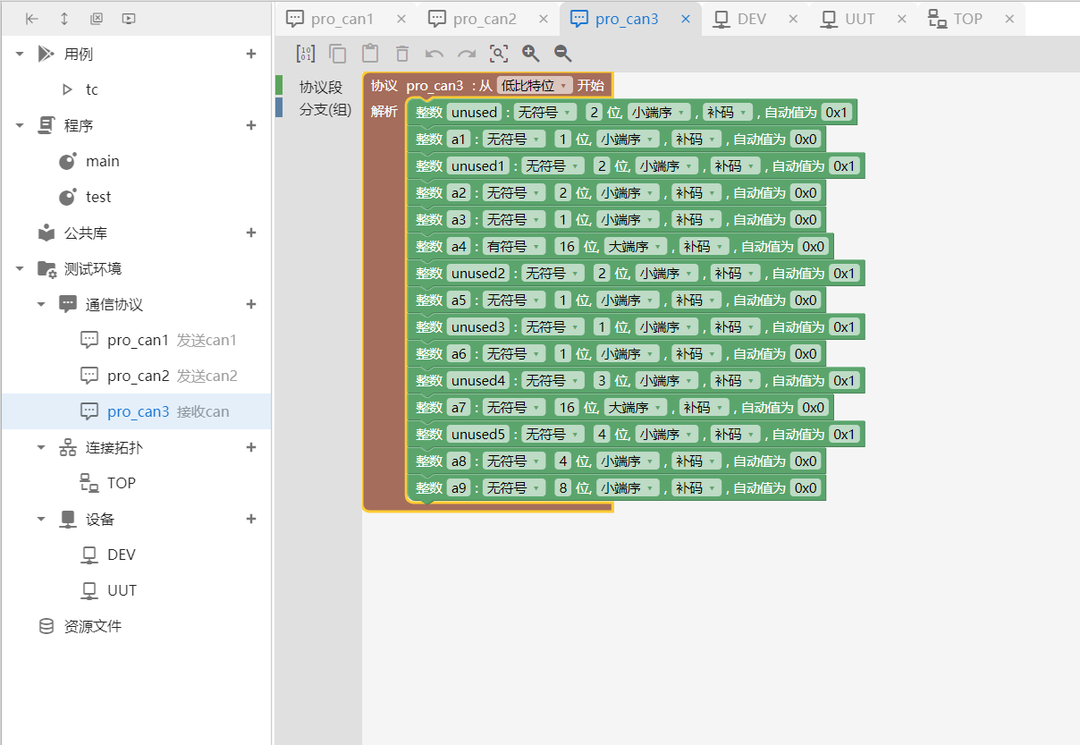
图5:通信协议
2. 测试程序
测试程序如下:
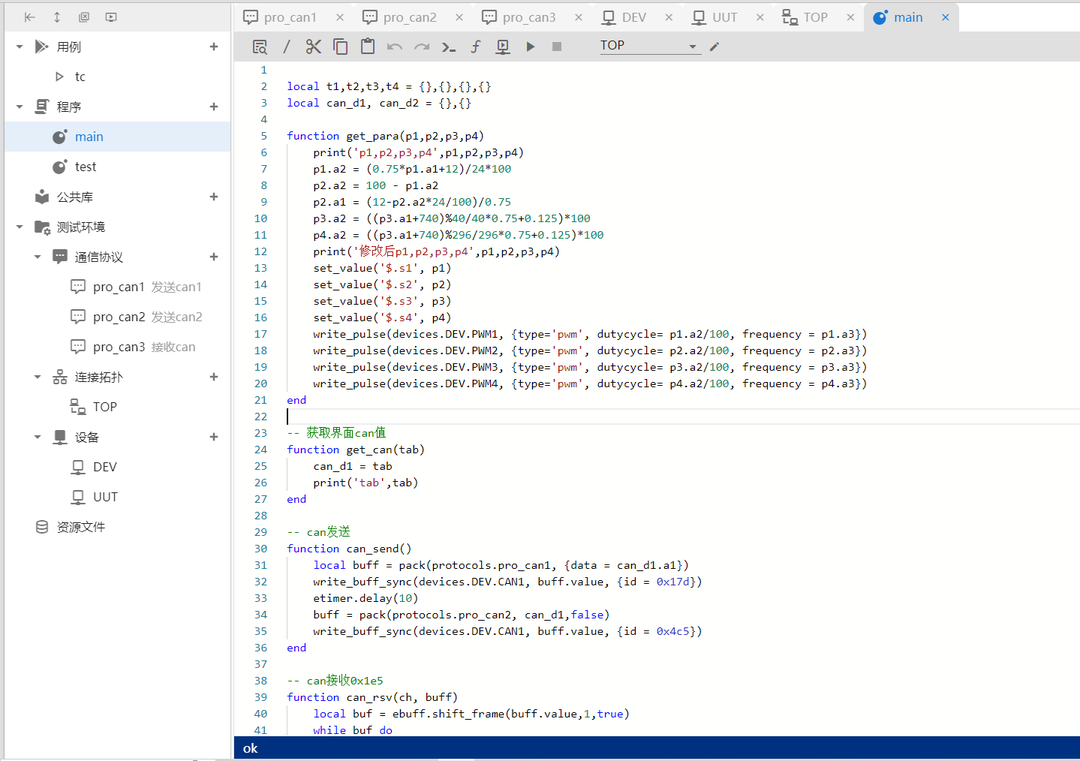
图6:测试程序
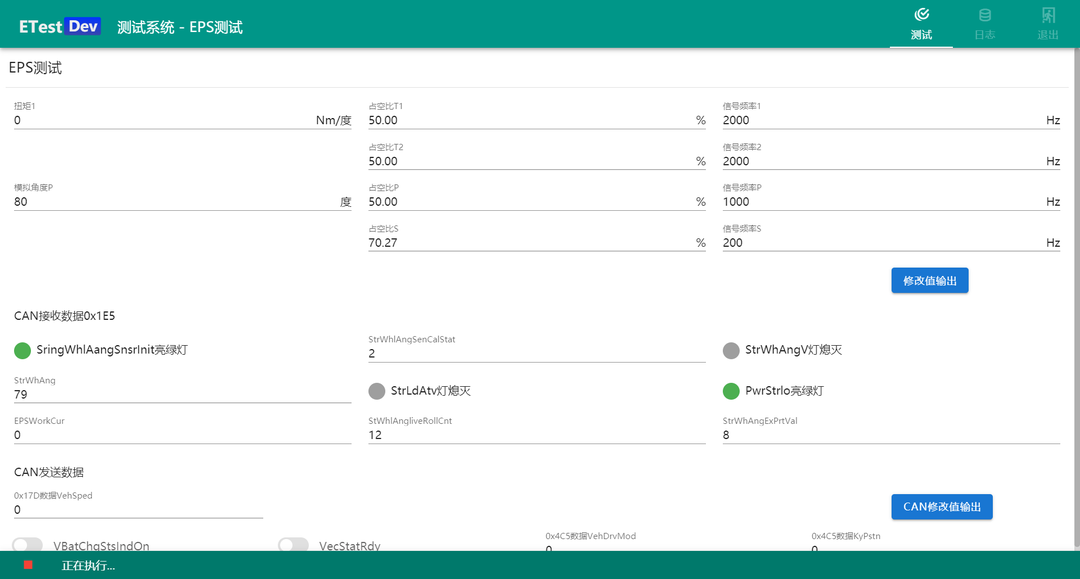
3. UI界面设计
设计的UI界面如下,可以做实时测试监控:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









