




1.CA介绍
摘要:最近关于移动网络设计的研究已经证明了通道注意力(例如,挤压和激励注意力)对于提升模型性能的显着有效性,但它们通常忽略了位置信息,而位置信息对于生成空间选择性注意力图很重要。 在本文中,我们通过将位置信息嵌入到通道注意力中,提出了一种新颖的移动网络注意力机制,我们称之为“协调注意力”。 与通过 2D 全局池化将特征张量转换为单个特征向量的通道注意力不同,坐标注意力将通道注意力分解为两个 1D 特征编码过程,分别沿两个空间方向聚合特征。 通过这种方式,可以沿一个空间方向捕获远程依赖性,同时可以沿另一空间方向保留精确的位置信息。 然后将所得的特征图分别编码为一对方向感知和位置敏感的注意力图,这些注意力图可以互补地应用于输入特征图以增强感兴趣对象的表示。 我们的坐标注意力很简单,可以灵活地插入经典移动网络,例如 MobileNetV2、MobileNeXt 和 EfficientNet,几乎没有计算开销。 大量实验表明,我们的坐标注意力不仅有利于 ImageNet 分类,而且更有趣的是,在下游任务(例如对象检测和语义分割)中表现更好。
官方论文地址:https://arxiv.org/pdf/2103.02907
官方代码地址:https://github.com/houqb/CoordAttention
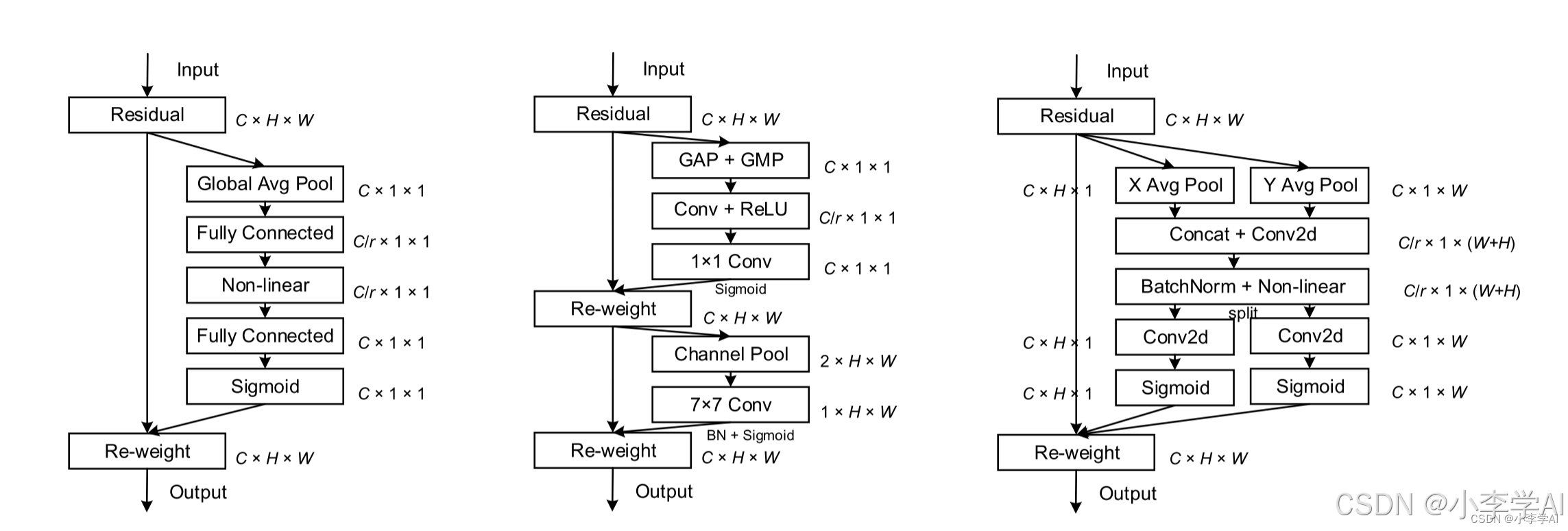
简单介绍: 坐标注意力机制是一种创新的注意力机制,它巧妙地结合了通道注意力与位置信息的优势,旨在显著增强移动网络的性能。这种机制通过对特征张量在垂直和水平两个空间维度上进行1D全局池化,精确地捕获了沿这两个方向的关键特征,不仅保留了精细的位置信息,还成功捕捉了长距离依赖性。这两个维度上捕获的特征图随后被独立地编码成具有方向感知和位置敏感性的注意力图。这些注意力图随后通过乘法操作作用于输入特征图,以精准地突出和强化图像中感兴趣的对象表示。
CA模块结构图:
2.代码
import torch
import torch.nn as nn
import math
import torch.nn.functional as F
class h_sigmoid(nn.Module):
def __init__(self, inplace=True):
super(h_sigmoid, self).__init__()
self.relu = nn.ReLU6(inplace=inplace)
def forward(self, x):
return self.relu(x + 3) / 6
class h_swish(nn.Module):
def __init__(self, inplace=True):
super(h_swish, self).__init__()
self.sigmoid = h_sigmoid(inplace=inplace)
def forward(self, x):
return x * self.sigmoid(x)
class CoordAtt(nn.Module):
def __init__(self, inp, reduction=32):
super(CoordAtt, self).__init__()
oup = inp
self.pool_h = nn.AdaptiveAvgPool2d((None, 1))
self.pool_w = nn.AdaptiveAvgPool2d((1, None))
mip = max(8, inp // reduction)
self.conv1 = nn.Conv2d(inp, mip, kernel_size=1, stride=1, padding=0)
self.bn1 = nn.BatchNorm2d(mip)
self.act = h_swish()
self.conv_h = nn.Conv2d(mip, oup, kernel_size=1, stride=1, padding=0)
self.conv_w = nn.Conv2d(mip, oup, kernel_size=1, stride=1, padding=0)
def forward(self, x):
identity = x
n, c, h, w = x.size()
x_h = self.pool_h(x)
x_w = self.pool_w(x).permute(0, 1, 3, 2)
y = torch.cat([x_h, x_w], dim=2)
y = self.conv1(y)
y = self.bn1(y)
y = self.act(y)
x_h, x_w = torch.split(y, [h, w], dim=2)
x_w = x_w.permute(0, 1, 3, 2)
a_h = self.conv_h(x_h).sigmoid()
a_w = self.conv_w(x_w).sigmoid()
out = identity * a_w * a_h
return out3.YOLOv12中添加CA方式
3.1 在ultralytics/nn下新建Extramodule
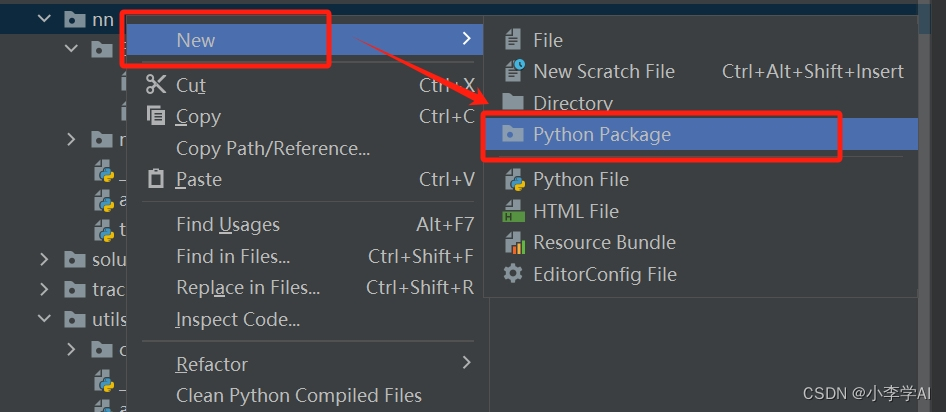

3.2 在Extramodule里创建CA

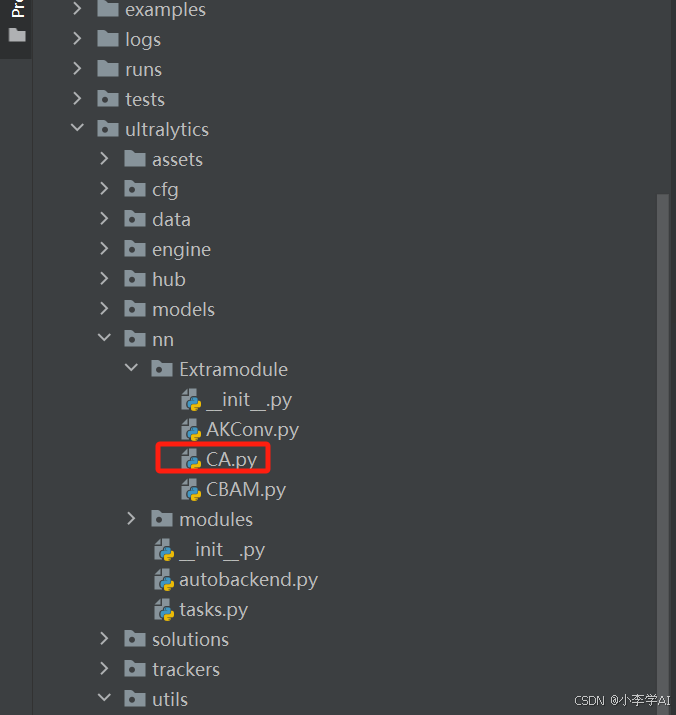
在CA.py文件里添加给出的CA代码
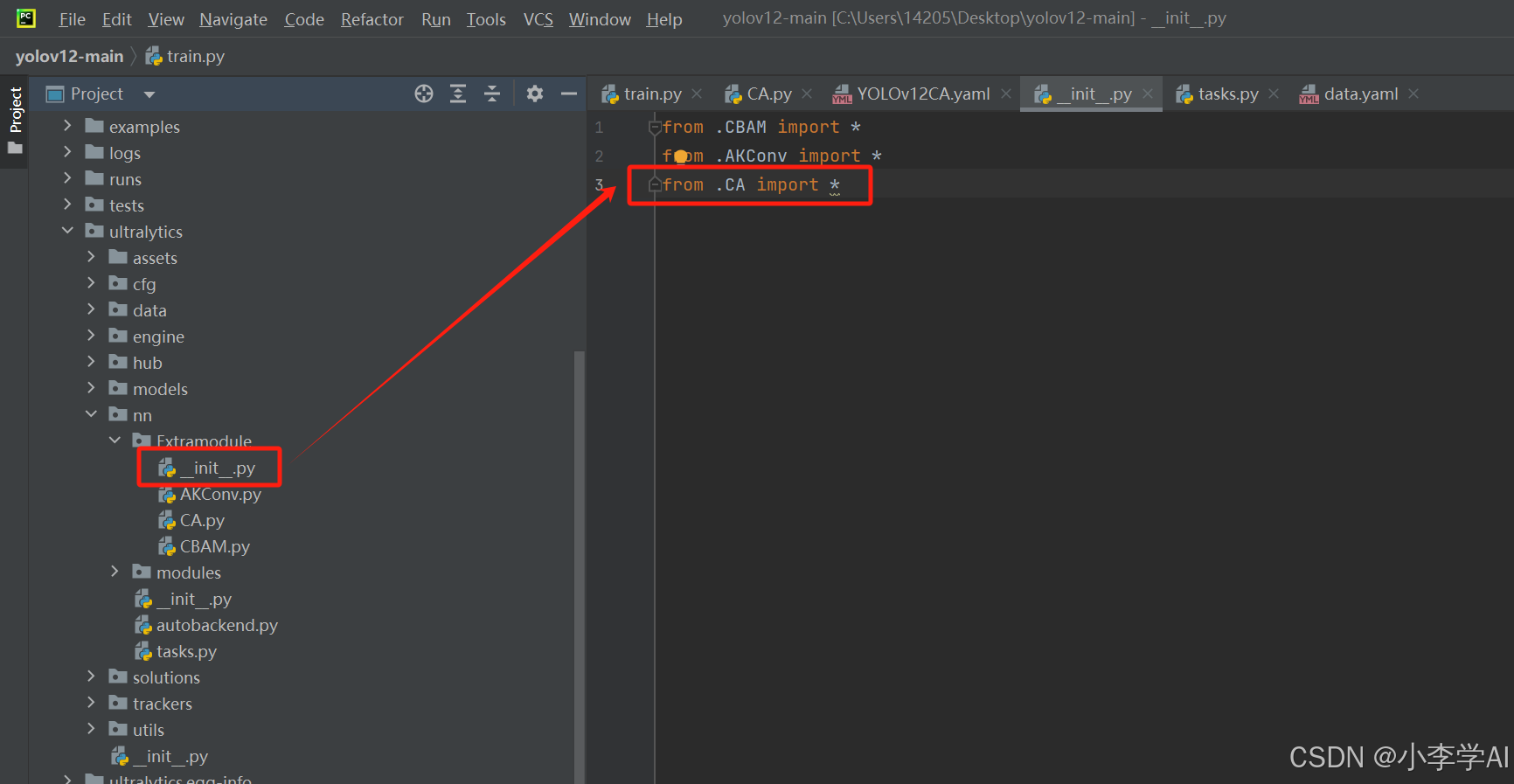
添加完CA代码后,在ultralytics/nn/Extramodule/__init__.py文件中引用
3.3 在task.py里引用
在ultralytics/nn/tasks.py文件里引用Extramodule

在task.py找到parse_model(ctrl+f可以直接搜索parse_model位置)
添加如下代码:
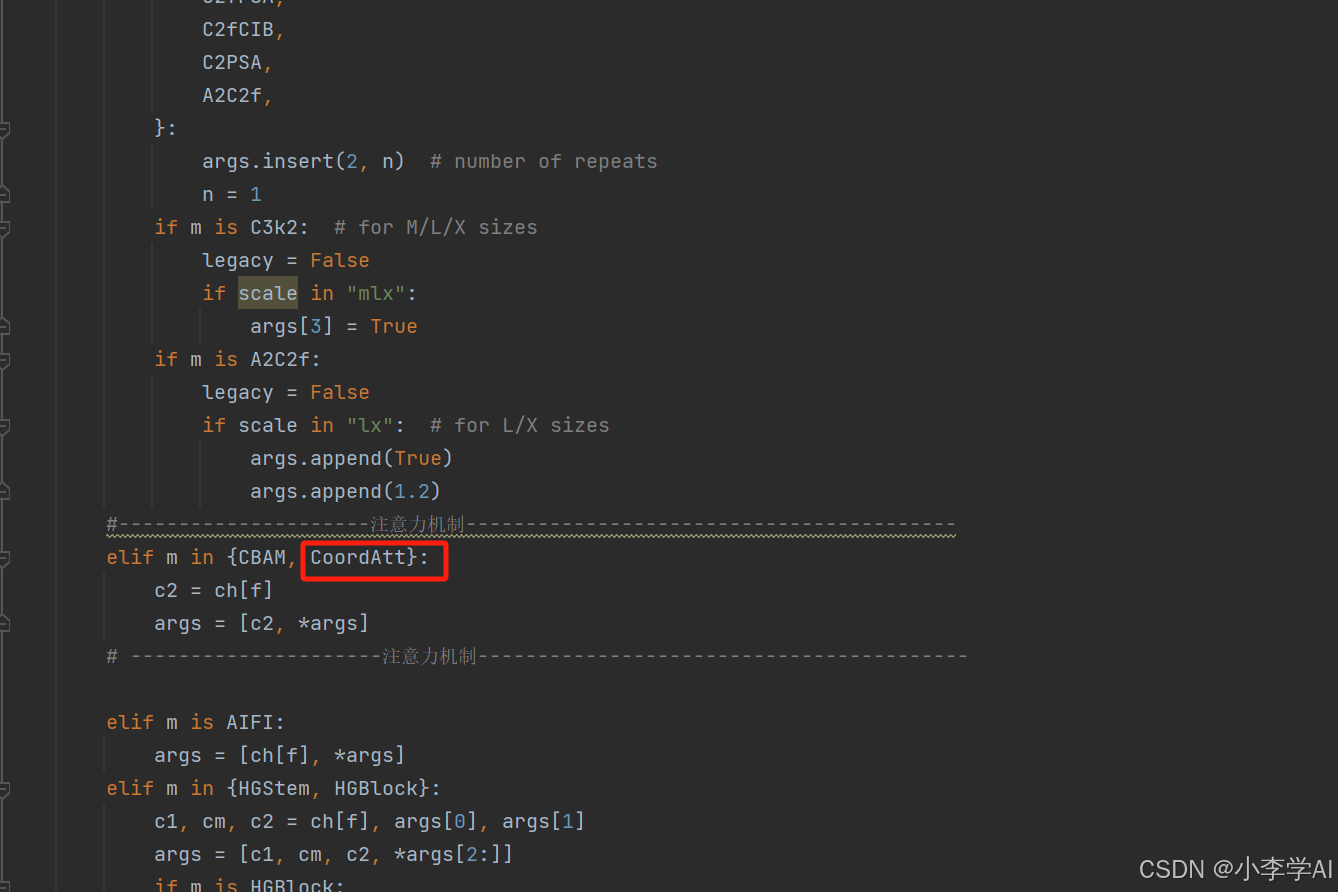
elif m in {CoordAtt}:
c2 = ch[f]
args = [c2, *args]4.新建一个YOLOv12CA.yaml文件
# YOLOv12 🚀, AGPL-3.0 license
# YOLOv12 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 6 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov12n.yaml' will call yolov12.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 465 layers, 2,603,056 parameters, 2,603,040 gradients, 6.7 GFLOPs
s: [0.50, 0.50, 1024] # summary: 465 layers, 9,285,632 parameters, 9,285,616 gradients, 21.7 GFLOPs
m: [0.50, 1.00, 512] # summary: 501 layers, 20,201,216 parameters, 20,201,200 gradients, 68.1 GFLOPs
l: [1.00, 1.00, 512] # summary: 831 layers, 26,454,880 parameters, 26,454,864 gradients, 89.7 GFLOPs
x: [1.00, 1.50, 512] # summary: 831 layers, 59,216,928 parameters, 59,216,912 gradients, 200.3 GFLOPs
# YOLO12n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 2, C3k2, [256, False, 0.25]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 2, C3k2, [512, False, 0.25]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 4, A2C2f, [512, True, 4]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 4, A2C2f, [1024, True, 1]] # 8
# YOLO12n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 2, A2C2f, [512, False, -1]] # 11
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 2, A2C2f, [256, False, -1]] # 14
- [-1, 1, CoordAtt, []] # 15
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 11], 1, Concat, [1]] # cat head P4
- [-1, 2, A2C2f, [512, False, -1]] # 18
- [-1, 1, CoordAtt, []] # 19
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 8], 1, Concat, [1]] # cat head P5
- [-1, 2, C3k2, [1024, True]] # 22 (P5/32-large)
- [-1, 1, CoordAtt, []] # 23
- [[15, 19, 23], 1, Detect, [nc]] # Detect(P3, P4, P5)
大家根据自己的数据集实际情况,修改nc大小。
5.模型训练
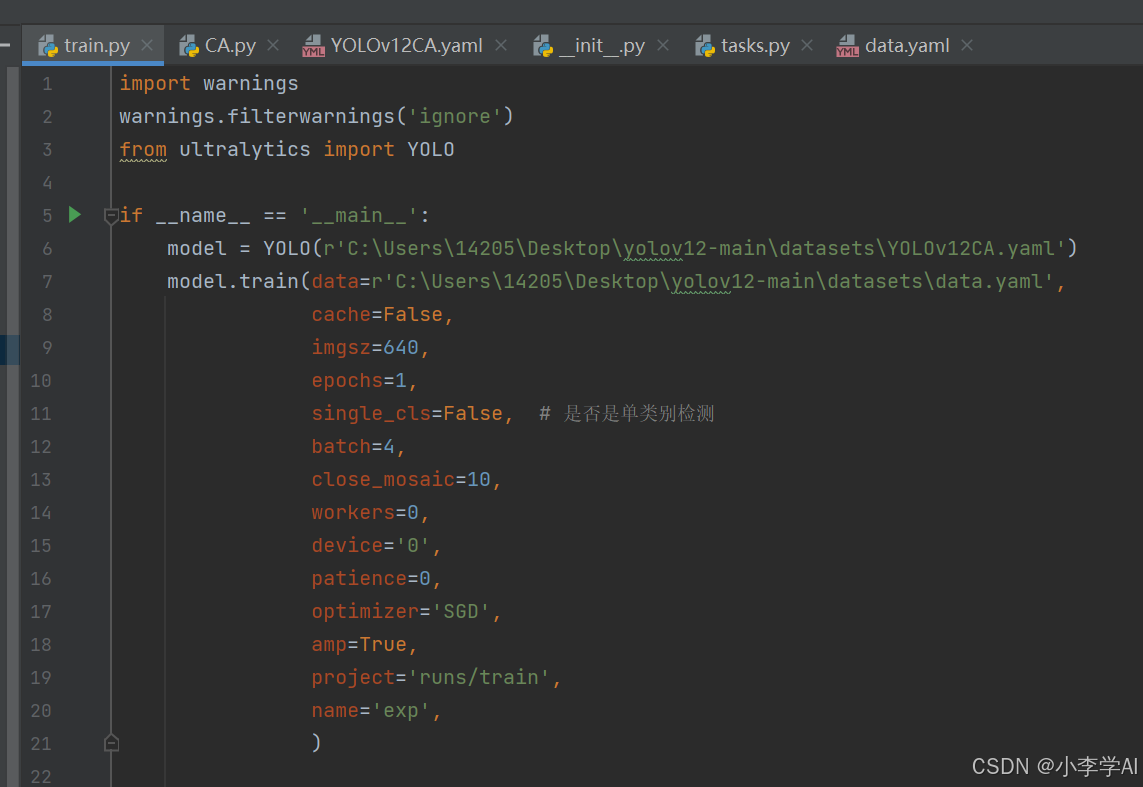
import warnings
warnings.filterwarnings('ignore')
from ultralytics import YOLO
if __name__ == '__main__':
model = YOLO(r'C:\Users\14205\Desktop\yolov12-main\datasets\YOLOv12CA.yaml')
model.train(data=r'C:\Users\14205\Desktop\yolov12-main\datasets\data.yaml',
cache=False,
imgsz=640,
epochs=1,
single_cls=False, # 是否是单类别检测
batch=4,
close_mosaic=10,
workers=0,
device='0',
patience=0,
optimizer='SGD',
amp=True,
project='runs/train',
name='exp',
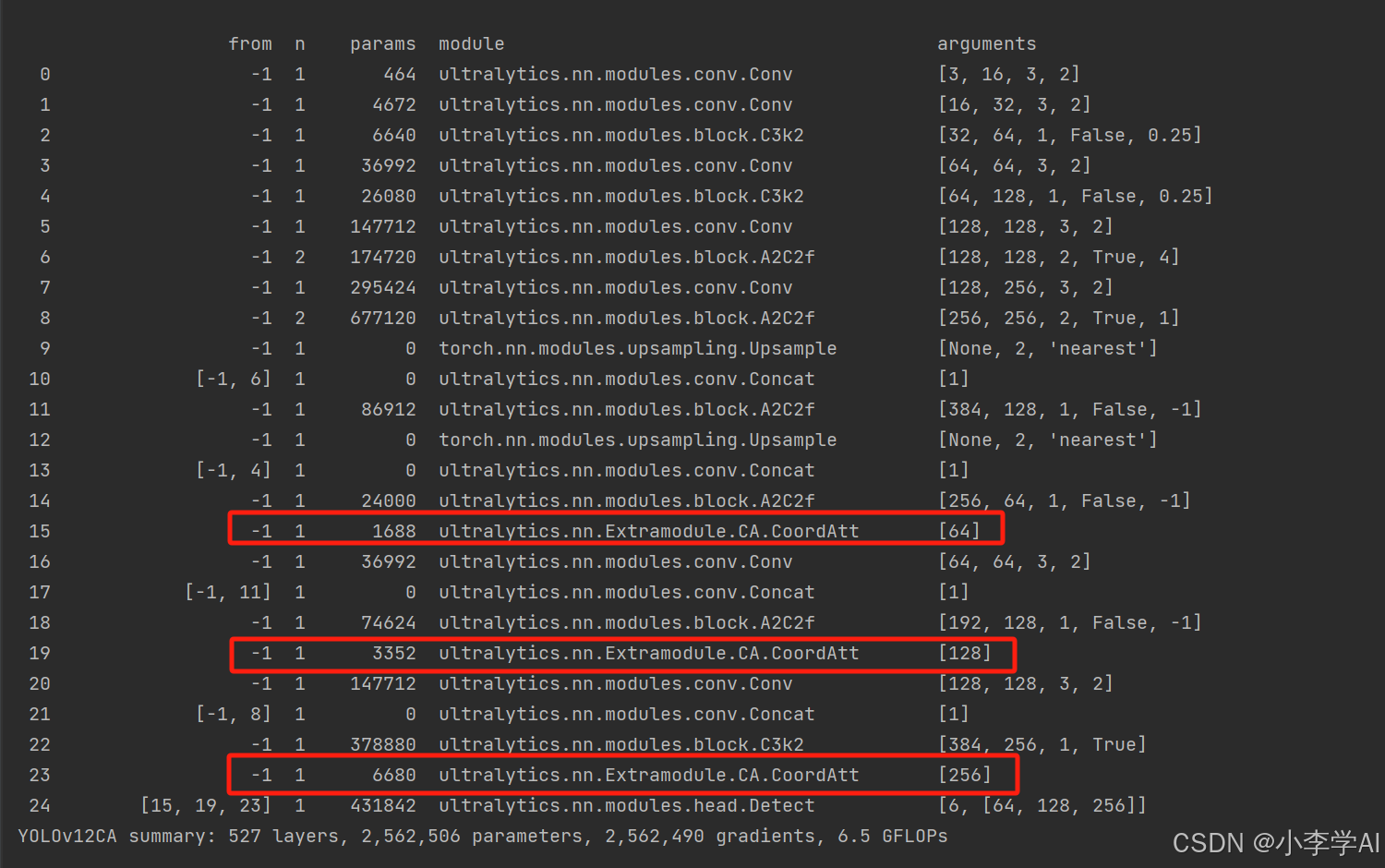
)模型结构打印,成功运行 :
6.本文总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的YOLOv12改进有效涨点专栏,本专栏目前为新开的,后期我会根据各种前沿顶会进行论文复现,也会对一些老的改进机制进行补充,如果大家觉得本文帮助到你了,订阅本专栏,关注后续更多的更新~


















 3712
3712

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









