



演示摘要:OpenChirp 低功耗广域网与生态系统
1 系统描述
低功耗广域网(LP-WANs)正日益被视为一种适用于城市规模物联网(IoT)部署的有吸引力的通信平台。它们能够在数千米的距离上将能量受限设备无线连接到网关。在包含数百或数千台设备的部署中,需要可扩展的网络基础设施,以稳定地将数据从受限无线设备传输到云服务器并返回。该基础设施主要由软件构成,理想情况下应具备稳定性、模块化和完全开放的特性,以支持该领域的进一步研究。此外,为了推动无线物理层的技术进步,我们需要低成本但高性能的无线电设备,能够访问原始无线电信号。
1.1 OpenChirp架构
OpenChirp[1]是一个完全开放的端到端低功耗广域网架构,旨在简化物联网(IoT)设备的设计和部署。目前它支持LoRa LPWAN(LoRaWAN)协议[2],未来计划支持蓝牙5、IEEE 802.15.44和其他物联网通信协议。
OpenChirp旨在轻松部署为私有或公共网络,并可完全访问所有前端和后端组件,包括网页界面、各种数据管理服务和API。现有的低功耗广域网解决方案目前并未提供对其系统中所有组件的访问。
OpenChirp的模块化和可扩展性如图3所示。

http://www.openchirp.io运行了一个OpenChirp实例。在接下来的章节中,我们将描述系统的主要组件。
MQTT接口 :所有LoRaWAN无线设备与网关通信,网关通过MQTT发布-订阅协议转发其数据。MQTT通信由Mosquitto MQTT代理管理。尽管目前仅支持一个代理,但未来的开发将包含对桥接多个MQTT代理的支持。每个设备由一个MQTT主题表示,各种服务、用户和其他设备可以向该主题发布或订阅消息。LoRaWAN的基于确认的重传和MQTT的服务质量参数确保无线设备与云之间数据传输的可靠性。所有物联网设备都需通过MQTT接口与OpenChirp通信。
HTTP REST接口 :用户通过HTTP REST接口与OpenChirp进行交互。这包括添加和配置设备及网关、生成唯一的设备ID和访问令牌、下载特定设备发布的数据等操作。各种网页界面、命令行工具和应用程序预计将通过REST接口与OpenChirp进行交互。所有HTTP请求均由Node服务器处理。
服务 :服务负责处理传入的数据,并对其执行各种操作。它们能够为原本简单的网络增添智能性。设备在配置时会向可用的服务注册,从而通知服务发布或订阅其主题。服务随后可以根据传入的数据或用户请求执行重要操作,例如存储数据、生成图表、提取数据包等。LoRaWAN服务器服务[3]和数据存储服务(基于InfluxDB实现)已在OpenChirp中实现并启用。其他服务,如用于解包数据的反序列化器和GPS地图服务,也可以启用。此外,还可以使用开放API开发自定义服务,并在任何外部服务器上运行。
认证与共享 :认证由与谷歌账户的OAuth集成管理。目前正在进一步开发以支持其他选项,如LDAP等。OpenChirp允许用户之间共享设备和设备数据。要共享设备,设备所有者可以授予其他用户对设备主题的发布和订阅权限。
网页界面 :网页界面提供了快速登录OpenChirp、添加和管理设备以及可视化设备收集的各种数据的方式。图4展示了使用AngularJS实现的网页界面示例。
1.2 LPRAN架构
LPRAN(如图1所示)是为LPWAN网关开发的一种辅助硬件模块,它以显著更低的成本模拟了软件定义无线电的功能。通过提供对原始无线电信号的访问,它支持诸如相干合并[4]等有趣的应用。
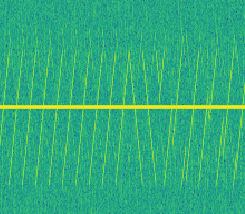
LPRAN的高性能射频前端采用Semtech SX1257[5]芯片(能够检测低至-30分贝低于噪声底限的信号),该芯片将原始无线电I/Q信号以Sigma-Delta调制流的形式输出。板载FPGA和树莓派3执行额外的信号处理,将该数据流转换为可用形式。图2展示了由LPRAN硬件捕获的信号示例。
2 演示
2.1 OpenChirp接口
我们将演示使用OpenChirp网络界面添加和管理LoRaWAN设备以及网关的便捷性和简易性。我们计划在演示区域部署多个无线LoRa设备(包括现成的PyCom LoPy和定制的LoRaBug设备),并能够使用OpenChirp实时记录和可视化数据。
2.2 LPRAN Micro-SDRR平台
我们将演示LPRAN板与树莓派3的组合,用于监听LoRa传输,并提供接收到的原始无线电信号以及接收信号的频谱图。



















 267
267

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









