




目录
八、C++11 新增:线程局部存储(Thread-Local Storage)
class 卑微码农:
def __init__(self):
self.技能 = ['能读懂十年前祖传代码', '擅长用Ctrl+C/V搭建世界', '信奉"能跑就别动"的玄学']
self.发量 = 100 # 初始发量
self.咖啡因耐受度 = '极限'
def 修Bug(self, bug):
try:
# 试图用玄学解决问题
if bug.严重程度 == '离谱':
print("这一定是环境问题!")
else:
print("让我看看是谁又没写注释...哦,是我自己。")
except Exception as e:
# 如果try块都救不了,那就...
print("重启一下试试?")
self.发量 -= 1 # 每解决一个bug,头发-1
# 实例化一个我
我 = 卑微码农()一、开篇:你写的代码,可能正在 “滥用” 内存
几年前接手过一个祖传项目,运行起来时不时崩溃,日志里全是 “段错误”“栈溢出” 的报错。排查时发现,前人把本该放堆上的大数组塞到了栈里,还在循环里用new创建对象却忘了delete—— 这些低级错误的根源,都是对 C++ 内存种类的理解混乱。

如果你也遇到过这些困惑:
- 局部变量为什么出了函数就失效?
new出来的对象为什么必须delete?- 全局变量和静态变量到底存在哪里?
- 字符串常量为什么不能修改?
本文会带你穿透内存的 “迷雾”。从代码运行的底层逻辑讲起,结合 12 个实战案例,搞懂 C++ 中 5 大内存区域的特性、用法和坑点。看完你会明白:那些让你熬夜调试的内存 bug,本质上都是 “用错了内存区域”。
二、内存到底是什么?先搞懂进程的 “内存地图”
计算机的内存就像一栋大楼,每个进程(运行中的程序)都占据其中一层。这一层被划分为多个 “功能区”,就像大楼里的客厅、卧室、储物间 —— 不同区域有不同的规矩,放错东西就会出问题。
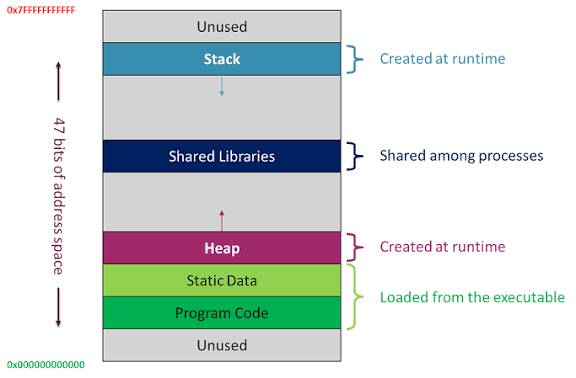
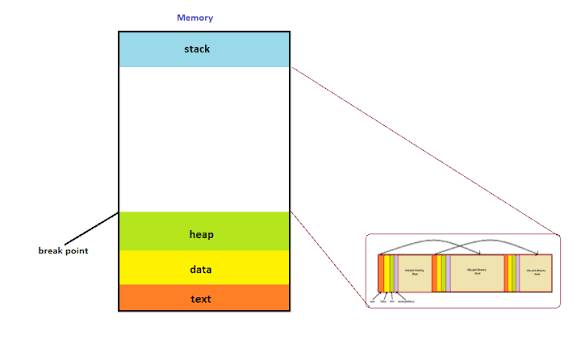
一个 C++ 程序运行时,内存大致分为 5 个区域(32 位系统为例):
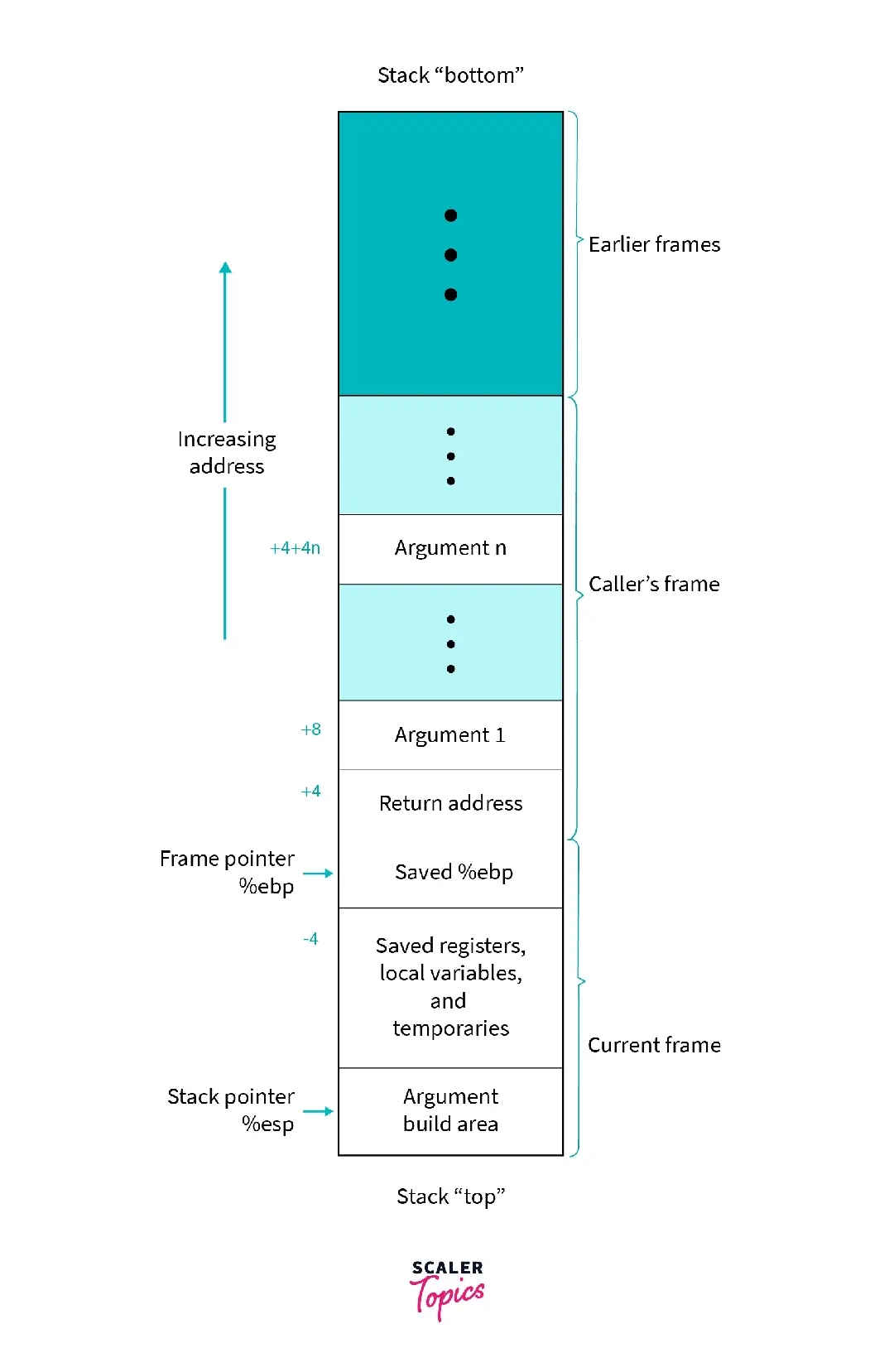
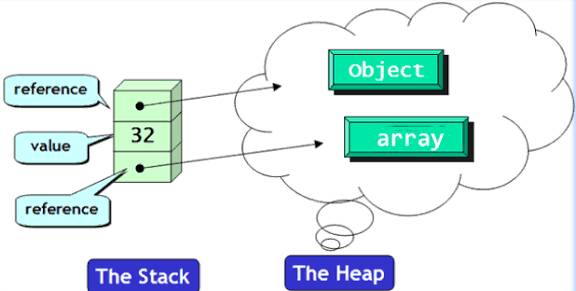
高地址 → 栈(Stack):放局部变量、函数参数,自动管理
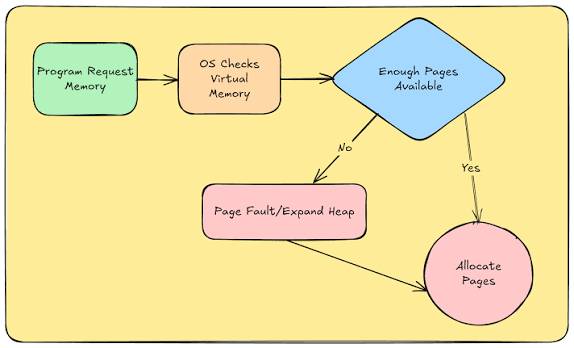
堆(Heap):动态分配的内存(new/malloc),手动管理
全局/静态存储区:放全局变量、静态变量,程序运行期一直存在
常量存储区:放字符串常量、const常量,只读
低地址 → 代码区:放程序的二进制指令,只读
这张 “内存地图” 是理解所有内存问题的基础。比如栈在高地址,堆在栈下方,两者相向生长 —— 当栈和堆都占满自己的空间,就会 “撞车” 导致程序崩溃。
三、栈内存:最快但最 “小气” 的内存区域
栈(Stack)是内存中最 “自动化” 的区域,就像超市的自动储物柜:存东西(创建变量)时按大小分配格子,取东西(离开作用域)时自动回收,速度极快,但空间有限。
3.1 栈内存的 3 个核心特性
特性 1:自动分配与回收,生命周期绑定作用域
#include <iostream>
using namespace std;
void test_stack() {
int a = 10; // 栈上分配:进入函数时自动创建
cout << "函数内:a=" << a << ",地址=" << &a << endl;
} // 离开函数:a自动销毁(栈空间回收)
int main() {
test_stack();
// cout << a << endl; // 编译报错:a已销毁
return 0;
}
关键点:
- 栈内存由编译器自动管理,无需手动
delete; - 变量生命周期从定义处开始,到所在代码块(
{})结束时结束; - 函数参数、局部变量、临时对象都存在栈上。
特性 2:大小固定且有限,超出就栈溢出
栈的大小在程序启动时就确定了(Windows 默认 1MB,Linux 默认 8MB),存放大数据会直接 “撑爆”:
// 错误示例:栈溢出
void stack_overflow() {
int big_array[1024 * 1024]; // 尝试分配4MB数组(1024*1024*4字节)
// Windows下直接崩溃:栈空间不足
}
// 正确示例:小数据用栈
void small_data() {
int small_array[100]; // 400字节,安全
}
栈溢出的典型场景:
- 定义超大局部数组(如上例);
- 递归调用层数过深(每次递归都会在栈上分配参数和局部变量):
// 递归导致栈溢出 void deep_recursion(int n) { int a; // 每次递归分配4字节 if (n > 0) deep_recursion(n - 1); // 递归100万次会占用约4MB栈空间 }
特性 3:分配速度极快,数据连续存储
栈的分配方式是 “指针移动”:栈有个 “栈顶指针”(esp 寄存器),分配内存时指针向下移(高地址方向),回收时指针向上移。这种操作不需要找空闲内存块,速度比堆快 10-100 倍。
同时,栈上的变量地址是连续的(因为按顺序分配):
void stack_order() {
int a;
int b;
cout << "a的地址:" << &a << endl; // 例如:0x0012ff7c
cout << "b的地址:" << &b << endl; // 例如:0x0012ff78(比a小4字节,连续)
}
3.2 栈内存的最佳使用场景
- 存储小数据(如 int、float、小结构体,一般小于 1KB);
- 变量生命周期短(仅在函数或代码块内使用);
- 需要快速访问的临时变量(利用栈的高速特性)。
3.3 栈内存的 3 个经典坑点
坑 1:返回局部变量的指针 / 引用(悬垂指针)
// 错误:返回栈上变量的指针
int* get_stack_ptr() {
int a = 10;
return &a; // a在函数结束后销毁,指针指向无效内存
}
int main() {
int* p = get_stack_ptr();
cout << *p << endl; // 未定义行为:可能输出乱码或崩溃
return 0;
}
解决办法:需要返回变量时,直接返回值(会拷贝到调用者栈上),或用堆内存。
坑 2:函数参数过多 / 过大导致栈溢出
// 错误:参数过大
struct BigStruct { char data[1024 * 1024]; }; // 1MB的结构体
void big_param(BigStruct s) { /* ... */ } // 传参时会拷贝整个结构体到栈上
int main() {
BigStruct bs;
big_param(bs); // 拷贝1MB数据到栈,直接溢出
return 0;
}
解决办法:大参数用指针或引用传递(仅传 4/8 字节地址):
void big_param_fix(const BigStruct& s) { /* ... */ } // 引用传递,安全
坑 3:误用栈内存存储动态大小数据
C99 允许 “变长数组”(VLA),但 C++ 标准不支持(部分编译器扩展支持),且存栈上依然有溢出风险:
// 危险:动态大小的栈数组(编译器扩展,非标准C++)
void dynamic_stack_array(int n) {
int arr[n]; // n是变量,数组大小动态确定,可能过大
}
解决办法:动态大小数据用堆内存(new[]或vector)。
四、堆内存:最灵活但最 “麻烦” 的内存区域
堆(Heap)是内存中最 “自由” 的区域,就像自助仓储:空间大(理论上可占满系统内存),可以按需分配,但需要自己记得 “退租”(释放),否则会 “占着茅坑不拉屎”(内存泄漏)。
4.1 堆内存的 3 个核心特性
特性 1:手动分配与释放,生命周期由程序员控制
堆内存需要用new(C++)或malloc(C)分配,用delete或free释放,生命周期不依赖作用域:
#include <iostream>
using namespace std;
int* create_heap_int() {
int* p = new int(10); // 堆上分配:手动创建
return p; // 函数结束后,堆内存依然存在
}
int main() {
int* p = create_heap_int();
cout << "main中:*p=" << *p << ",地址=" << p << endl; // 仍可访问
delete p; // 必须手动释放,否则内存泄漏
p = nullptr; // 释放后置空,避免野指针
return 0;
}
关键点:
- 堆内存分配会返回地址(指针),需用指针接收;
- 释放后必须将指针置空,否则成为 “野指针”(指向已释放的内存);
- 堆内存大小仅受系统可用内存限制(远大于栈)。
特性 2:分配速度慢,内存地址不连续
堆的分配需要 “找空闲块”:系统维护一张空闲内存链表,分配时遍历链表找足够大的块,释放时还要合并相邻空闲块 —— 这个过程比栈的 “指针移动” 慢得多。
同时,堆上的变量地址是不连续的(多次分配可能找到不同位置的空闲块):
void heap_address() {
int* p1 = new int;
int* p2 = new int;
cout << "p1地址:" << p1 << endl; // 例如:0x00365820
cout << "p2地址:" << p2 << endl; // 例如:0x00365840(不连续)
delete p1; delete p2;
}
特性 3:容易产生内存碎片
频繁分配和释放不同大小的堆内存,会导致内存中出现很多 “碎片”(小块空闲内存),无法满足大内存分配需求:
// 模拟内存碎片
void memory_fragmentation() {
// 分配10个小块
int* ptrs[10];
for (int i = 0; i < 10; i++) {
ptrs[i] = new int[10]; // 40字节小块
}
// 释放奇数索引的块,留下碎片
for (int i = 1; i < 10; i += 2) {
delete[] ptrs[i];
}
// 此时申请一个400字节的块会失败(碎片总大小够,但分散)
int* big_ptr = new(nothrow) int[100]; // 可能返回nullptr
if (!big_ptr) cout << "分配失败:内存碎片导致" << endl;
// 释放剩余块
for (int i = 0; i < 10; i += 2) {
delete[] ptrs[i];
}
delete[] big_ptr;
}
4.2 堆内存的最佳使用场景
- 存储大数据(如大数组、复杂对象,超过 1KB);
- 变量生命周期长(需要跨函数、跨作用域使用);
- 动态大小的数据(大小在运行时才能确定,如用户输入的长度)。
4.3 堆内存的 4 个致命坑点(附解决方案)
坑 1:内存泄漏(忘记释放)
// 错误:内存泄漏
void memory_leak() {
int* p = new int[1000]; // 分配内存
// 业务逻辑...
return; // 忘记delete,内存永远无法回收
}
解决办法:
- 用智能指针(
unique_ptr/shared_ptr)自动管理:#include <memory> void no_leak() { std::unique_ptr<int[]> p(new int[1000]); // 出作用域自动释放 // 无需手动delete }
坑 2:重复释放(同一内存释放多次)
// 错误:重复释放
void double_free() {
int* p = new int;
delete p;
// ... 中间代码 ...
delete p; // 重复释放,程序崩溃
}
解决办法:
- 释放后立即将指针置空(
delete p; p = nullptr;); - 用智能指针(自动管理,避免手动释放)。
坑 3:野指针(访问已释放的内存)
// 错误:野指针
void wild_pointer() {
int* p = new int(10);
delete p;
// p未置空,成为野指针
cout << *p << endl; // 未定义行为:可能输出乱码或崩溃
}
解决办法:
- 释放后必须置空(
p = nullptr;); - 访问指针前检查是否为
nullptr。
坑 4:new[]与delete不匹配(类型错误)
// 错误:释放数组用了delete(应为delete[])
void wrong_delete() {
int* arr = new int[10]; // 数组分配用new[]
delete arr; // 错误:释放数组必须用delete[]
}
解决办法:
- 严格遵循 “
new配delete,new[]配delete[]”; - 优先用
vector(自动管理数组内存,无需手动释放)。
五、全局 / 静态存储区:寿命最长的 “常驻内存”
全局 / 静态存储区存放全局变量和静态变量,它们的生命周期和程序一样长 —— 程序启动时创建,程序退出时销毁,就像大楼里的 “常驻居民”。
5.1 全局变量:定义在函数外的变量
#include <iostream>
using namespace std;
// 全局变量:存放在全局/静态存储区
int global_var = 10;
const int global_const = 20; // 全局常量也在这里
void print_global() {
cout << "全局变量:" << global_var << ",地址:" << &global_var << endl;
}
int main() {
print_global(); // 任何函数都能访问全局变量
global_var = 30; // 可以修改(非const的全局变量)
print_global(); // 输出30
return 0;
}
特性:
- 定义在所有函数之外,默认初始化为 0(局部变量不初始化是随机值);
- 整个程序可见(需注意命名冲突);
- 内存空间在程序启动时分配,退出时释放。
5.2 静态变量:带static关键字的变量
静态变量分两种,但都存在全局 / 静态存储区:
场景 1:全局静态变量(文件内可见)
// 文件A.cpp
static int file_static = 100; // 仅在A.cpp中可见
// 文件B.cpp
// extern int file_static; // 编译报错:无法访问A.cpp的静态全局变量
作用:限制全局变量的作用域为当前文件,避免多文件同名冲突。
场景 2:局部静态变量(函数内的静态变量)
#include <iostream>
using namespace std;
int& get_static() {
static int local_static = 0; // 局部静态变量:第一次调用时初始化
local_static++;
return local_static;
}
int main() {
cout << get_static() << endl; // 1(第一次调用,初始化后+1)
cout << get_static() << endl; // 2(第二次调用,直接+1)
cout << get_static() << endl; // 3
return 0;
}
特性:
- 定义在函数内,用
static修饰; - 只初始化一次(第一次进入函数时);
- 生命周期是整个程序,但作用域仅限函数内。
5.3 全局 / 静态存储区的坑点
坑 1:全局变量初始化顺序不确定
多个文件中的全局变量,初始化顺序是未定义的,依赖编译器实现:
// A.cpp
int a = b + 1; // 危险:b可能还未初始化
// B.cpp
int b = 10;
解决办法:用 “局部静态变量” 替代全局变量(延迟初始化):
int& get_b() {
static int b = 10; // 第一次调用时才初始化
return b;
}
int a = get_b() + 1; // 安全:调用时b已初始化
坑 2:静态变量在多线程中不安全
C++11 前,局部静态变量的初始化不是线程安全的(可能多个线程同时初始化):
// 多线程下不安全(C++11前)
int& unsafe_static() {
static int val = 0; // 可能被多个线程同时初始化
return val;
}
解决办法:
- C++11 及以上标准保证局部静态变量初始化是线程安全的;
- 若用旧标准,需加锁保护初始化过程。
六、常量存储区:只读的 “禁区”
常量存储区存放字符串常量、const修饰的常量(全局 / 静态),特点是 “只读”—— 试图修改会导致程序崩溃。
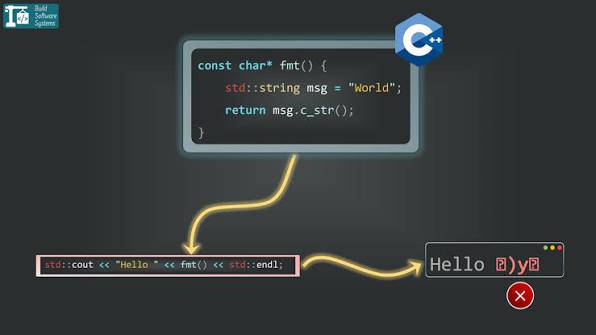
6.1 字符串常量:存放在常量区的字符数组
#include <iostream>
using namespace std;
int main() {
const char* str1 = "hello"; // "hello"存放在常量区,str1是栈上的指针
const char* str2 = "hello"; // 相同字符串常量可能共享内存
cout << "str1地址:" << (void*)str1 << endl; // 例如:0x00405060
cout << "str2地址:" << (void*)str2 << endl; // 可能和str1相同(共享)
// str1[0] = 'H'; // 编译报错(const修饰),强行修改会崩溃
return 0;
}
关键点:
- 字符串常量以
\0结尾,存储在常量区; - 相同的字符串常量可能被编译器优化为共享同一块内存;
- 必须用
const char*指向(C++11 后),禁止修改。
6.2 const 常量:根据位置决定存储区域
- 全局 const 常量:存放在常量存储区(只读);
- 局部 const 常量:存放在栈上(但被编译器标记为只读,修改会报错):
注意:const的本质是 “编译期检查”,不是 “内存保护”—— 强行用指针修改可能通过编译,但行为未定义(依赖编译器和系统)。
七、代码区:存放程序 “指令” 的只读区域
代码区存放程序的二进制指令(机器码),由编译器生成,特点是 “只读”(防止程序被篡改)。
#include <iostream>
using namespace std;
void print_hello() {
cout << "hello" << endl;
}
int main() {
// 输出函数地址(代码区的地址)
cout << "print_hello的地址:" << (void*)print_hello << endl;
return 0;
}
特性:
- 程序加载时由操作系统从磁盘读入内存,只读;
- 地址空间低(32 位系统一般从 0x08048000 开始);
- 大小固定(编译后就确定了)。
代码区一般不会直接操作,但病毒或恶意程序可能通过修改代码区指令实现攻击(因此现代系统会开启内存保护,禁止修改代码区)。
八、C++11 新增:线程局部存储(Thread-Local Storage)

多线程程序中,每个线程需要自己的 “私有全局变量”(不被其他线程共享),C++11 引入的thread_local关键字解决了这个问题 —— 线程局部存储区为每个线程单独分配一份变量副本。
8.1 线程局部变量的用法
#include <iostream>
#include <thread>
#include <mutex>
using namespace std;
// 线程局部变量:每个线程有一份独立副本
thread_local int tl_var = 0;
mutex mtx;
void thread_func(int id) {
// 每个线程修改自己的副本
tl_var = id;
// 休眠100ms,确保其他线程已修改
this_thread::sleep_for(chrono::milliseconds(100));
// 输出当前线程的变量值
lock_guard<mutex> lock(mtx);
cout << "线程" << id << ":tl_var=" << tl_var << ",地址=" << &tl_var << endl;
}
int main() {
thread t1(thread_func, 1);
thread t2(thread_func, 2);
t1.join();
t2.join();
return 0;
}
运行结果(地址不同,证明是不同副本):
线程1:tl_var=1,地址=0x00c4e780
线程2:tl_var=2,地址=0x00c56780
8.2 线程局部存储的特性
- 每个线程有独立的变量副本,互不干扰;
- 生命周期与线程相同(线程创建时初始化,线程结束时销毁);
- 可修饰全局变量、静态变量、局部静态变量。
九、内存区域对比表:一张表搞定所有区别
| 内存区域 | 存储内容 | 分配方式 | 释放方式 | 生命周期 | 大小限制 | 访问速度 |
|---|---|---|---|---|---|---|
| 栈(Stack) | 局部变量、函数参数 | 编译器自动分配 | 离开作用域自动释放 | 与作用域一致 | 小(MB 级) | 最快 |
| 堆(Heap) | 动态分配的对象 / 数组 | 手动new/malloc | 手动delete/free | 程序员控制 | 大(GB 级) | 较慢 |
| 全局 / 静态存储区 | 全局变量、静态变量 | 程序启动时分配 | 程序退出时释放 | 整个程序运行期 | 中等 | 较快 |
| 常量存储区 | 字符串常量、全局 const | 程序启动时分配 | 程序退出时释放 | 整个程序运行期 | 小 | 较快 |
| 代码区 | 二进制指令 | 程序加载时分配 | 程序退出时释放 | 整个程序运行期 | 固定(编译后确定) | 快 |
| 线程局部存储区 | 线程私有全局变量 | 线程创建时分配 | 线程结束时释放 | 与线程一致 | 中等 | 较快 |
十、实战建议:不同场景如何选择内存区域?
- 小数据、短生命周期 → 栈内存(如函数内的临时变量、小结构体);
- 大数据、长生命周期 → 堆内存(配合智能指针,如大数组、跨函数对象);
- 全程序共享、常驻数据 → 全局 / 静态存储区(如配置参数、单例对象);
- 只读数据 → 常量存储区(如字符串常量、固定配置);
- 多线程私有数据 → 线程局部存储(如线程 ID、私有缓存)。
十一、总结:理解内存,才能写出 “不崩溃” 的代码

C++ 的内存管理之所以难,不是因为语法复杂,而是因为每种内存区域有自己的 “规矩”—— 栈的自动管理带来便利但空间有限,堆的灵活分配带来自由但需手动释放,全局区的常驻特性带来共享但有初始化风险。
90% 的内存 bug(泄漏、溢出、野指针),本质都是 “用错了区域”:把大数组塞到栈里导致溢出,用了堆内存却忘了释放导致泄漏,返回栈变量的指针导致野指针。
记住这篇文章的核心:写代码时先问自己 “这个变量该放哪”—— 想清楚生命周期、大小、访问方式,内存 bug 自然会远离你。
最后送大家一个调试内存问题的 “三板斧”:
- 用
cout打印变量地址,判断所在区域(栈地址高且连续,堆地址低且分散); - 用智能指针(
unique_ptr/shared_ptr)管理堆内存,减少手动释放; - 借助工具(Valgrind、VS 调试器)检测泄漏和越界。
理解内存,你就掌握了 C++ 的 “半壁江山”。
附录:内存调试工具推荐
- Valgrind(Linux):检测内存泄漏、野指针、越界访问,命令:
valgrind --leak-check=full ./program; - Visual Studio 调试器(Windows):内存窗口可查看各区域内存分布,支持内存断点;
- AddressSanitizer(跨平台):编译器内置工具(GCC/Clang 支持),编译时加
-fsanitize=address,能检测多数内存错误。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









