




 本文详细介绍了Vue.js中的数据驱动理念,MVVM架构模式以及其核心要素——计算属性和监听器(watch)。计算属性提供缓存功能,只在依赖变化时更新。watch用于执行异步操作或响应多个值变化。此外,还阐述了Vue组件的生命周期,包括挂载、更新和销毁阶段。组件化是提升代码复用性的关键,而路由缓存利用`<keep-alive>`可以优化用户体验。最后,讨论了Vue的hash模式与history模式,并提到了在history模式下可能遇到的问题及其解决方案。
本文详细介绍了Vue.js中的数据驱动理念,MVVM架构模式以及其核心要素——计算属性和监听器(watch)。计算属性提供缓存功能,只在依赖变化时更新。watch用于执行异步操作或响应多个值变化。此外,还阐述了Vue组件的生命周期,包括挂载、更新和销毁阶段。组件化是提升代码复用性的关键,而路由缓存利用`<keep-alive>`可以优化用户体验。最后,讨论了Vue的hash模式与history模式,并提到了在history模式下可能遇到的问题及其解决方案。
数据驱动理念
简单的来说,当数据发生变化时,页面也会跟着变化,开发者不需要手动修改dom
MVVM
M:modal:数据 V:view 视图 ViewModal:数据和视图连接的桥梁(实例化)
MVVM三要素:
计算属性
好处:有缓存的效果。当一个计算属性所依赖的数据发生变化时,他才会重新获取值
作用:计算的结果会被缓存,除非依赖的响应式prototype发生变化才会计算+
注意:如果某个依赖(非prototype)在该实例范畴之外,数据不会自动更新,示例如下:
var vm = new Vue({
data: { a: 1 },
computed: {
// 仅读取
aDouble: function () {
return this.a * 2
},
// 读取和设置
aPlus: {
get: function () {
return this.a + 1
},
set: function (v) {
this.a = v - 1
}
}
}
})
vm.aPlus // => 2
vm.aPlus = 3
vm.a // => 2
vm.aDouble // => 4
watch和computed
watch: 执行异步操作或较大开销的操作 ,一个值影响多个值的变化
computed:多个值影响一个值的变化
由于computed有缓存 所以在实际操作中两个都能使用的时候 优先考虑computed
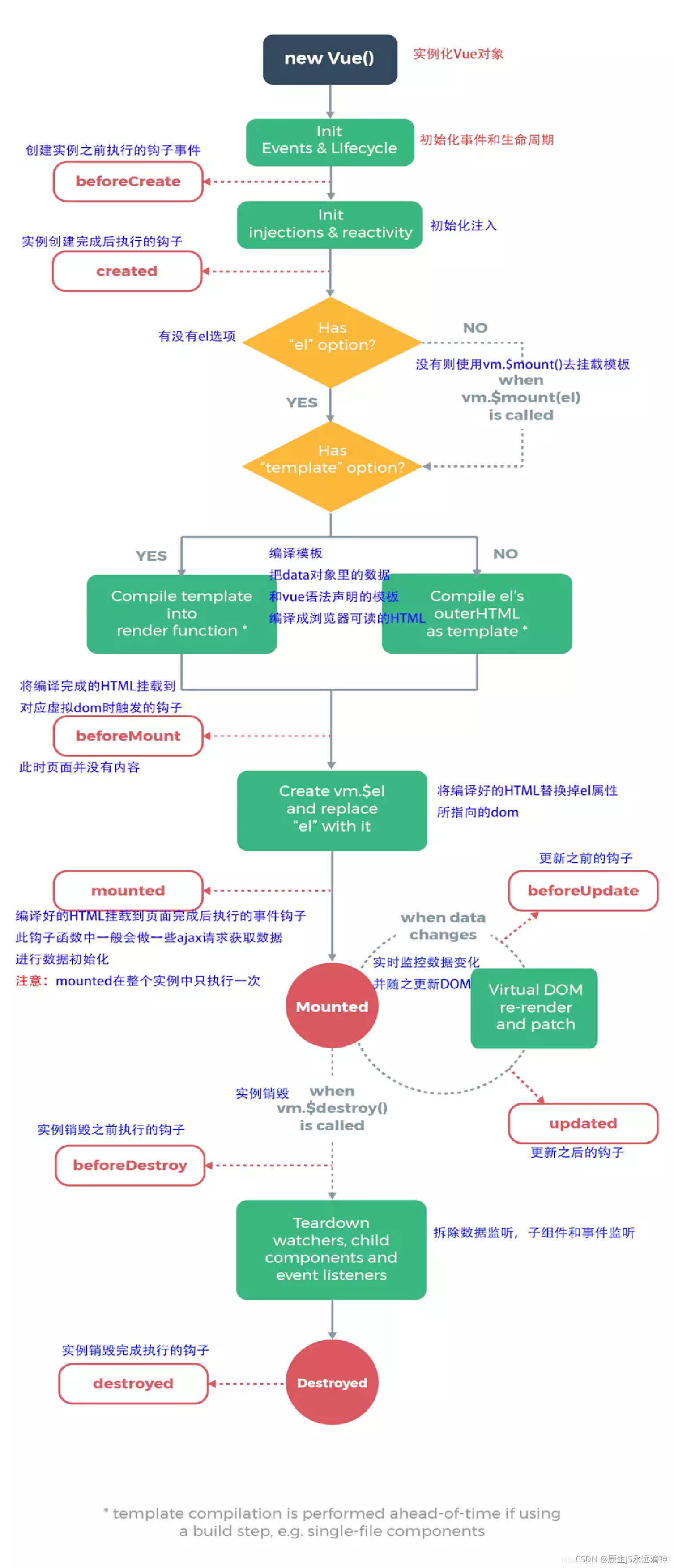
生命周期函数
挂载:
- beforeCreate
- created
- beforeMount
- mounted
更新:(元素或组件发生变化操作)
- beforeUpdate
- updated
销毁:
- beforeDestory
- destoryed
图解
在组件中关于data不是一个对象,而是一个函数的原因,官方文档有明确的说明
组件化理解
定义: 组件是可复用的实例
应用场景:
- 通用型组件:实现最基本的功能,具有通信性和可复用性
- 业务组件:用于完成具体的业务功能
- 页面组件 :页面中的内容应该放在独立的组件中,根据需求进行切换
路由组件缓存
<keep-alive include="要进行缓存路由的名称" ><router-view/></keep-alive>
注意:要设置缓存的路由时候 在定义router下的路由规则需要设置name属性 name的值和上面include的值一样
keep-alive有两个钩子函数:activated,deactivated
activated:执行时机为 当a页面跳转到b页面(必须是缓存页面)的时候触发 用来执行需要更新的数据
deactivated:执行时机 从b页面跳出的时候执行
点击刷新后执行的钩子函数:created—>mounted—>activated
应用场景: 当从商品列表页面跳转到商品详情页面,在点击返回的时候 数据并没有发生变化要展示的还是原来的数据的情况下 可以使用路由缓存
hash模式与history模式
设置方式 默认为hash模式
要设置为history模式 只需要在配置路由的地方加一个mode属性 值为history 就ok了
注意:history模式存在问题 在初次加载的时候页面没有问题,是由于第一次加载的时候是调用的h5中的history.pushState()加载,但是在刷新之后,前端会发送请求,后端是没有接口只是加载了静态资源的数据,只是将index.html返回,解决方式为导入connect-history-api-fallback 然后使用express的use中间件启用
const app = express()
const history = require("connect-history-api-fallback")
app.use(history())
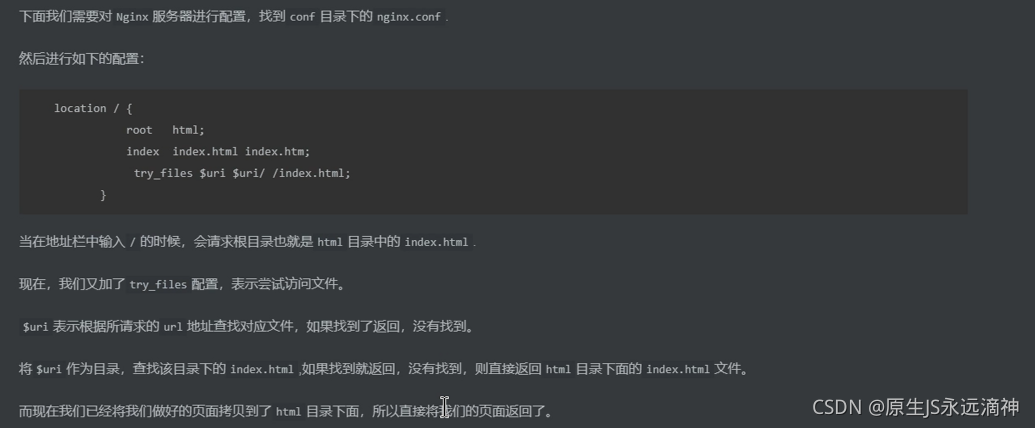
nginx配置history路由模式原理及方法
错误识别处理

出现这种错误的原因是因为 vue有运行时版本和完成时版本 运行时版本不支持template模板语法 只有完成版本才支持template模板语法,完成时版本比运行时版本大10k左右
解决方式:两种
- 设置vue.config.js文件的runtimepiler的值为true 将运行时版本改变为完整版(本质上也是通过构建render函数的方式 不过是自动转换 不需要人为动手)
- 通过构建render函数的方式解决
// template: `<a :href="to" ><slot></slot></a>`
// 通过构建render函数的方式解决运行时版本不能解析template模板问题
render(h) {
// h有三个参数
//第一个参数 要创建的标签名,
//第二个参数 要创建标签的属性 是一个对象 ,
//第三个参数 要创建标签前中嵌套的标签 是一个数组
return h("a", {
attrs: {
href: this.to
}
},
// 获取匿名slot的方式 为 this.$slot.default
[this.$slots.default])
}

















 2917
2917

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









