



kanass是一款国产开源免费、简洁易用的项目管理工具,包含项目管理、项目集管理、事项管理、版本管理、迭代管理、计划管理等相关模块。工具功能完善,用户界面友好,操作流畅。本文主要介绍计划管理。
1、添加阶段
制定项目阶段是瀑布式开发的核心基础,所以需要先创建瀑布式项目,再添加阶段
1.1 添加瀑布式项目
项目->添加项目->选择瀑布式研发项目->填写信息->提交
 添加项目
添加项目
|
属性 |
是否必填 |
描述 |
|
项目类型 |
必填 |
需要选择瀑布研发类型。 只有瀑布研发类型才有计划模块,而敏捷研发类型有迭代模块 |
|
项目key |
必填 |
项目的唯一标识,不可重复,不能修改 |
|
可见范围 |
必填 |
公共项目:系统中所有成员可见 私密项目:只有项目成员可见 |
|
计划时间 |
必填 |
规划项目的预计开始时间和预计完成时间 |
|
可见范围 | 必填 |
公共项目系统中的所有成员都可以进入到项目查看 私密项目是只有此项目的成员才可以在项目列表中看到 |
| 所属产品 | 非必填 | 可以将项目与产品关联,非必填。若此处不关联产品,项目创建成功后不支持再次关联产品 |
| 所属项目集 | 非必填 | 可以将项目关联到项目集,非必填。若此时不关联项目集,项目创建成功后,还可以再次关联项目集 |
1.2 添加阶段
点击项目名称(瀑布式项目)->阶段->添加阶段。阶段添加成功后以列表的形式显示在页面
 添加阶段
添加阶段
|
属性 |
是否必填 |
描述 |
|
计划名称 |
必填 |
为当前计划设置名称 |
|
负责人 |
必填 |
设置当前计划负责人 |
|
计划状态 |
必填 |
未开始、进行中、已发布,不同的状态会在甘特图中以不同的颜色表示 |
|
开始结束时间 |
必填 |
计划预计的开始结束时间,设置的时间会在页面右侧以甘特图的形式显示 |
|
计划描述 |
非必填 |
为当前计划添加描述 |
2、阶段详情
2.1 添加事项
点击阶段名称,进入阶段的事项页面。阶段模块中可以添加三种事项类型,需求、任务、缺陷。
点击添加事项->选择事项类型->填写信息->创建,事项添加成功
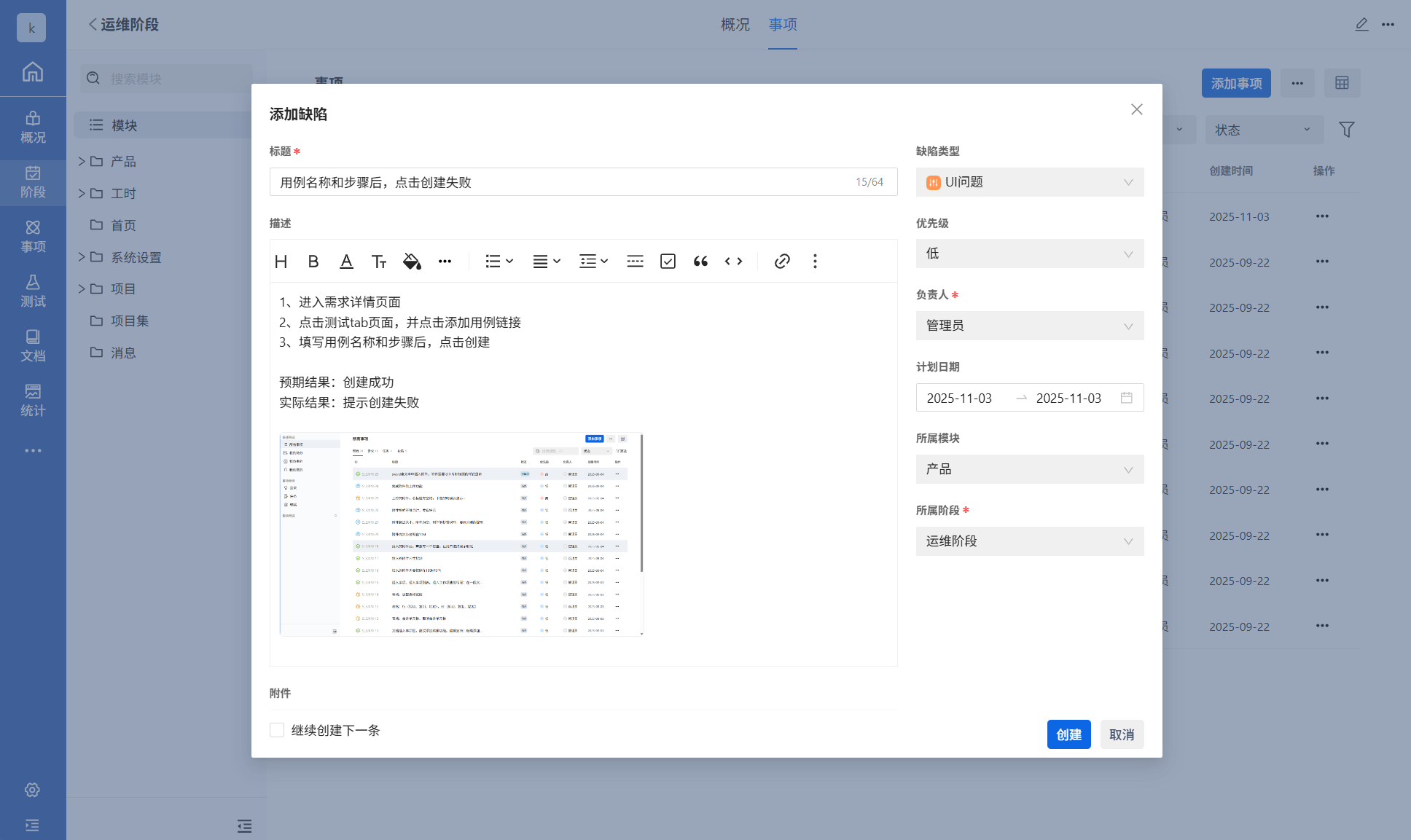 添加事项
添加事项
添加事项页面的字段介绍:
|
属性 |
是否必填 |
描述 |
|
所属模块 |
非必填 |
创建路径:项目->事项->左侧导航栏中添加模块 |
|
所属阶段 |
必填 | 选择上一步已经创建好的阶段 |
|
继续创建下一条 |
非必填 |
勾选后,点击确定添加页面不关闭,且之前填写的内容不清空 |
2.2 编辑事项
事项添加成功后,可以对事项进行编辑
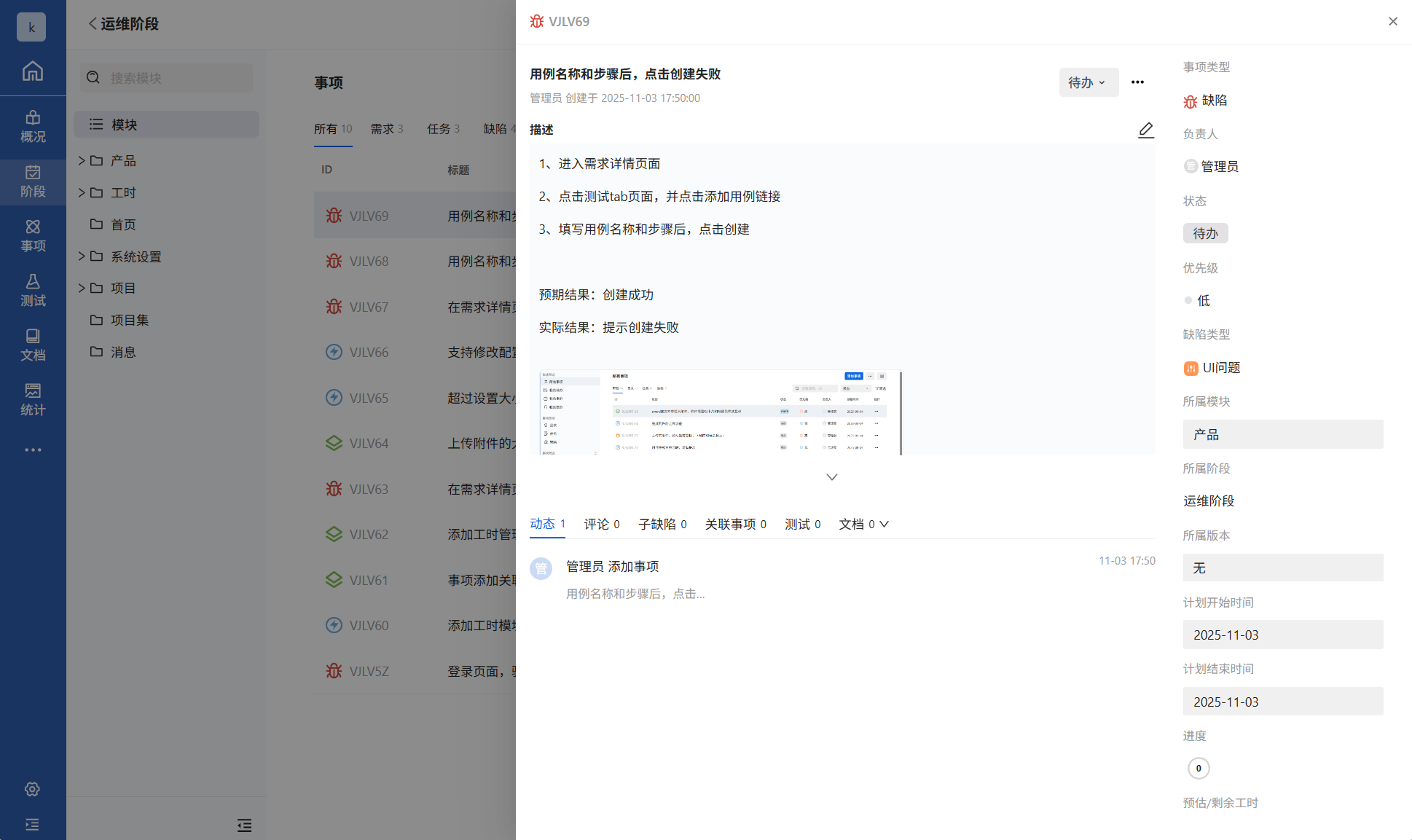
- 编辑事项详情
点击事项名称,页面开右抽屉,展示当前事项的详细信息,用户可以在详细信息页面修改事项
|
属性 |
是否支持修改 |
描述 |
|
所属阶段 |
支持 |
事项所属阶段可以修改 |
|
负责人 |
支持 |
只能更换成此项目中已经添加的成员 |
|
计划时间 |
支持 |
修改后,对应的甘特图也会同步修改 |
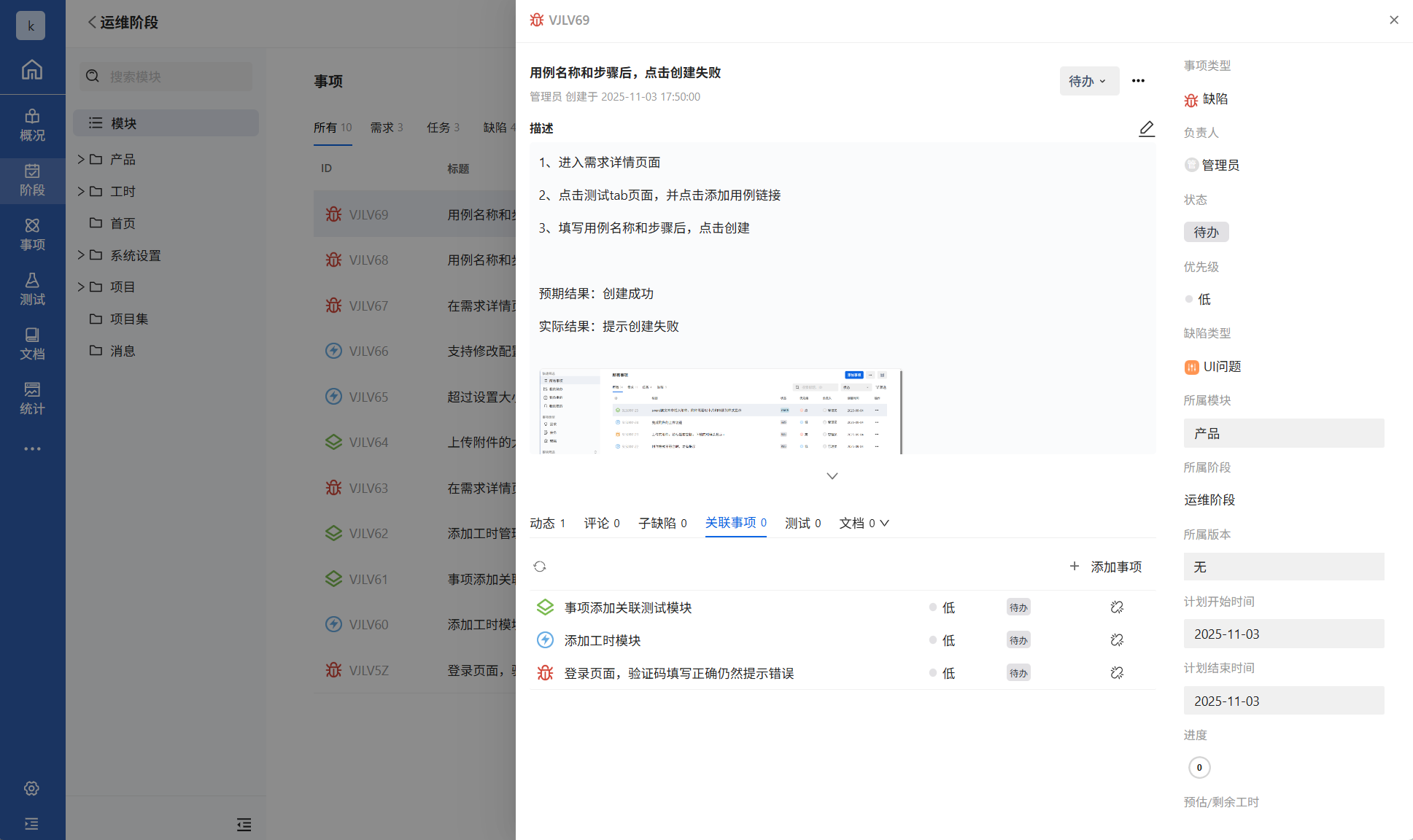
- 事项关联
3、阶段概览
点击阶段内的概览页面,页面中展示阶段的总体概况

阶段概览
- 阶段详情
阶段的详情区域显示阶段的名称、负责人、事项状态与数量、事项计划时间与阶段进度、阶段状态
- 阶段燃尽图
阶段燃尽图区域,用燃尽图显示当前阶段的进行状态,蓝色线条代表实际进展,绿色线条代表计划紧张。若两条先重合或者接近,表明当前阶段的进行很顺利并可以按照计划时间完成。
- 我的待办
我的待办区域,显示当前阶段下的事项状态,及每个状态下的事项个数
- 最新动态
此区域显示当前阶段的一些动态信息,如创建事项、修改事项状态等信息
4、编辑阶段
在阶段列表页面或者在阶段详情页面,点击修改按钮,进入阶段的编辑页面。
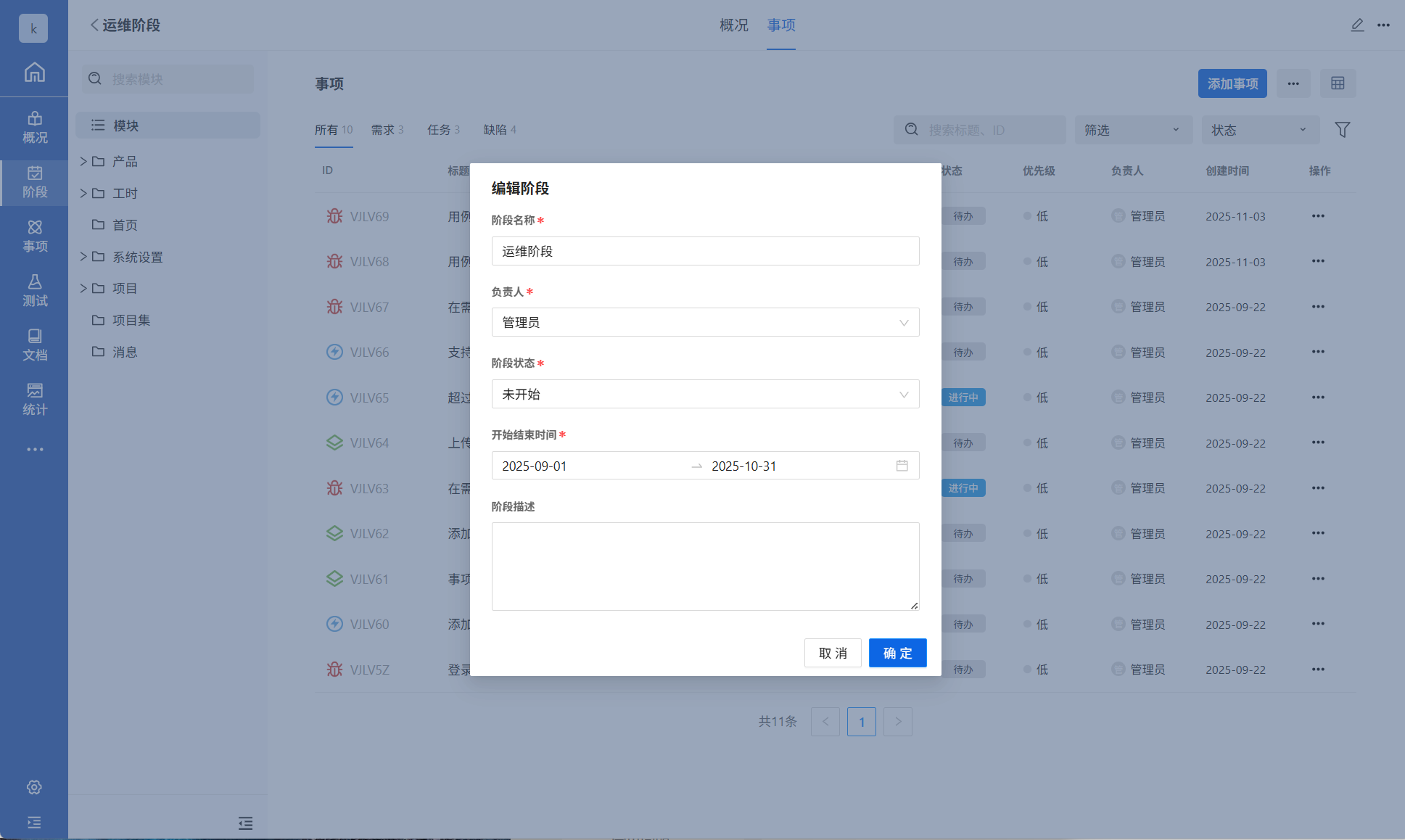 编辑阶段
编辑阶段
|
属性 |
是否支持修改 |
描述 |
| 计划名称 | 支持 | 修改后,在树形结构中同步更新 |
| 负责人 | 支持 | 只能选择当前项目中存在的用户 |
| 计划状态 | 支持 | 可以更改计划为待办、进行中、已发布,且更改后,甘特图中的颜色同步更新 |
| 开始结束时间 | 支持 | 修改时间后,甘特图中的时间区间也同步更新 |
5、删除阶段
在阶段列表页面或者在阶段详情页面,点击更多->删除按钮,阶段删除成功
 删除
删除

















 1729
1729

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









