






概述
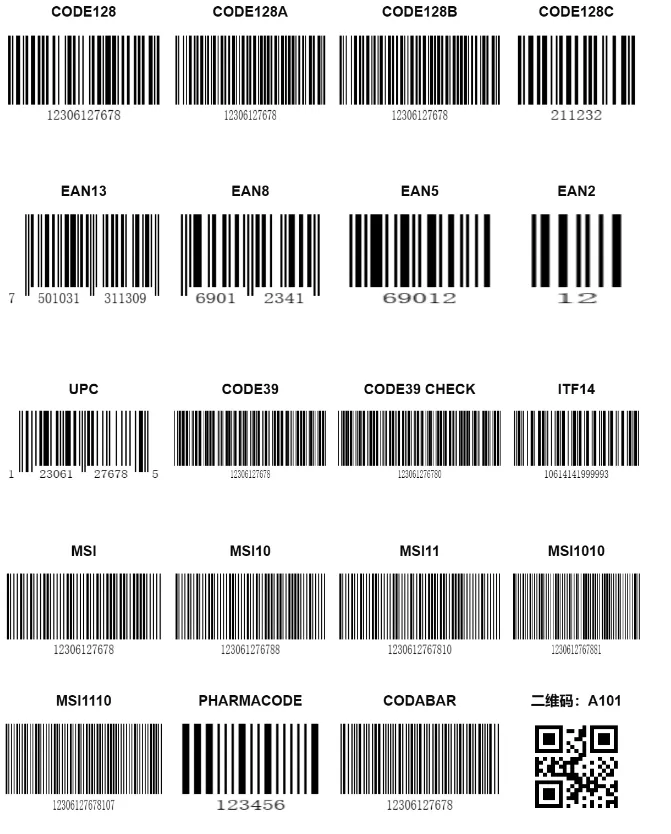
条形码与二维码:演示条形码与二维码,条形码数据将来自于关联的字段值。支持各种常用的条形码与二维码。
应用场景
如下图所示,简单展示数据
示例说明
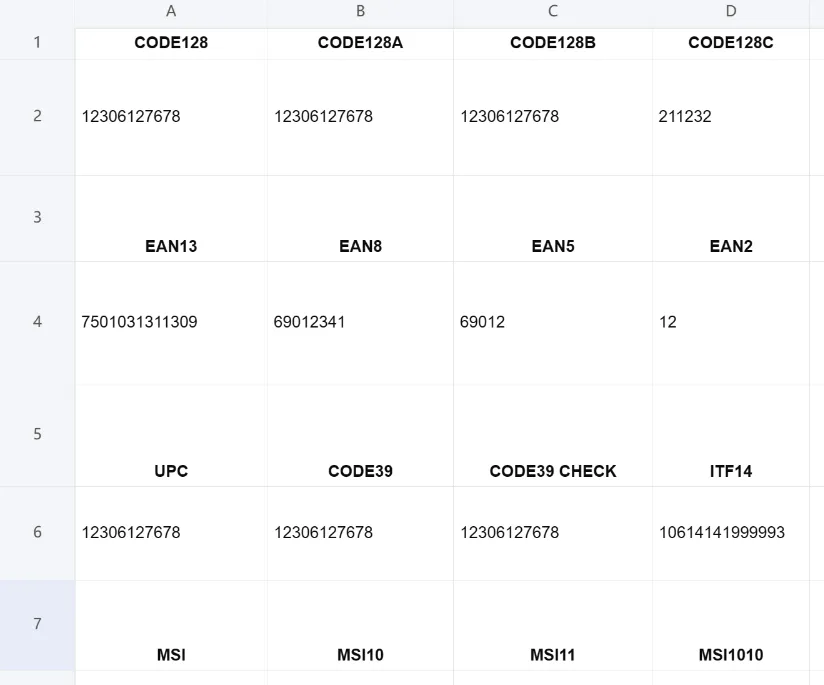
数据准备
在数据面板中添加数据集,可选择Json数据集和API服务数据集。Json数据集输入如下图所示:
[{"MSI":12306127678,"UPC":12306127678,"EAN2":12306127678,"EAN5":12306127678,"EAN8":12306127678,"EAN13":12306127678,"ITF14":12306127678,"MSI10":12306127678,"MSI11":12306127678,"CODE39":12306127678,"CODABAR":12306127678,"CODE128":12306127678,"MSI1010":12306127678,"MSI1110":12306127678,"CODE128A":12306127678,"CODE128B":12306127678,"CODE128C":12306127678,"二维码":"A101","PHARMACODE":12306127678,"CODE39 CHECK":12306127678}]
报表设计
输入数据,在顶部工具栏将元素类型选为条形码或二维码。
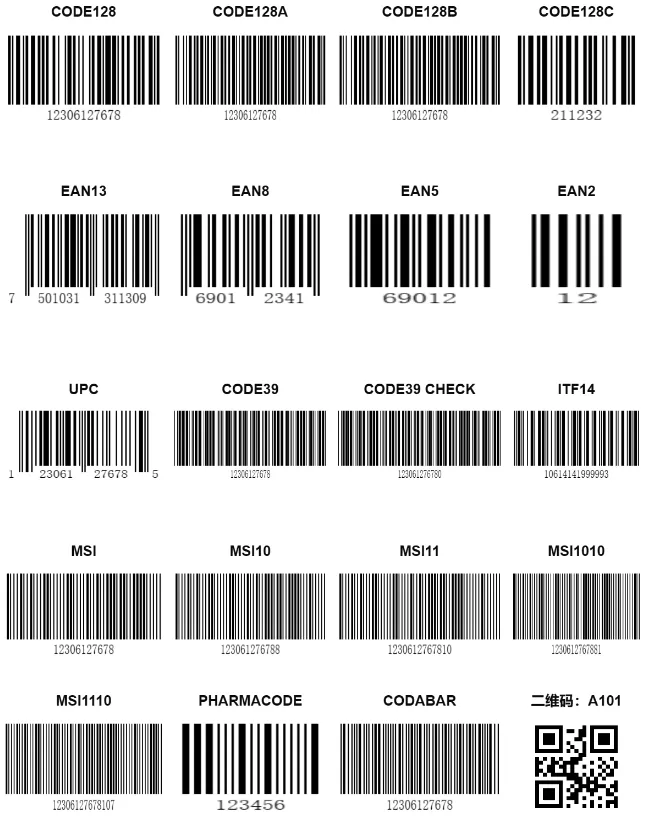
如下图所示
效果预览
参考文档
- 小智报表样例源码下载
- https://gitee.com/tizdata_admin/vue-xzreport-example.git
- 小智报表demo体验
- https://xzdemo.tizdata.com/#/imbedShow/reportExample
- 丰富的报表模板示例
- 小智报表在线试用
- https://xzreport.com
- 小智报表js sdk下载
- https://tizdata.com/xzdownload/
- 开发使用文档
- https://doc.tizdata.com/xiaozhi/650
tps://doc.tizdata.com/xiaozhi/650



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











