






 本文探讨了`std::enable_shared_from_this`的作用,它如何解决对象被多次释放的问题,通过实例展示了如何正确使用它以确保资源安全。关键点在于理解引用计数和智能指针的行为,以及如何通过继承来防止资源错误释放。
本文探讨了`std::enable_shared_from_this`的作用,它如何解决对象被多次释放的问题,通过实例展示了如何正确使用它以确保资源安全。关键点在于理解引用计数和智能指针的行为,以及如何通过继承来防止资源错误释放。
std::enable_shared_from_this 是一个类模板,那它是用来干嘛的呢?光看它的名字可能可以猜出它是:返回指向当前对象的shared_ptr智能指针。在说明它的作用前我们可以看一下如下代码:
#include <memory>
#include <iostream>
class A
{
public:
A()
{
std::cout << "A()" << std::endl;
}
~A()
{
std::cout << "~A()" << std::endl;
}
std::shared_ptr<A> getSharedPtr()
{
std::shared_ptr<A> ptr(this);
return ptr;
}
};
int main()
{
std::shared_ptr<A> ptr1(new A());
std::shared_ptr<A> ptr2 = ptr1->getSharedPtr();
return 0;
}
类 A 中有一个函数 getSharedPtr() 函数,用于返回指向当前对象的一个智能打针,就是用 this 构造了一个智能指针进行返回,我们看一下这样会不会有问题呢?执行结果如下:
执行没有异常,那这样用是正确的吗?在回答前我们再来看一下修改的代码:
#include <memory>
#include <iostream>
class A
{
public:
A(): mPtr(new int(10))
{
std::cout << "A(), *mPtr = " << *mPtr <<std::endl;
}
~A()
{
std::cout << "~A()" << std::endl;
delete mPtr;
mPtr = nullptr;
}
std::shared_ptr<A> getSharedPtr()
{
std::shared_ptr<A> ptr(this);
return ptr;
}
private:
int *mPtr;
};
int main()
{
std::shared_ptr<A> ptr1(new A());
std::shared_ptr<A> ptr2 = ptr1->getSharedPtr();
return 0;
}
类 A 里多加了一个指针成员变量 mPtr,同时在构造函数里 mPtr 指向了 new 出来的内存空间,初始化为 10;在析构函数里 delete mPtr,这些都属于正常操作,那执行结果如何呢?
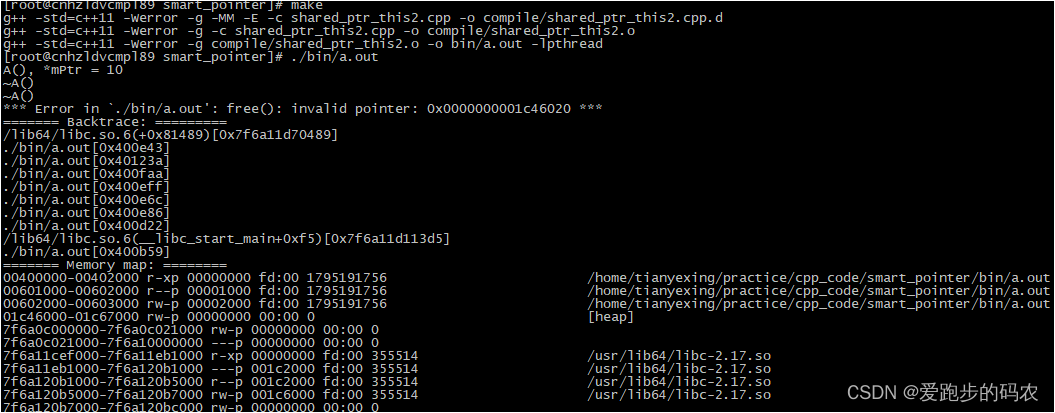 可以看出是 free 了无效的指针导致程序崩溃。我们应该能看到是重复释放的问题,这里我们将裸指针赋给了智能指针,这样做潜在的危险就是对象被多次释放。我们加两行打印看一下,打印出智能指针的引用计数是怎样的:
可以看出是 free 了无效的指针导致程序崩溃。我们应该能看到是重复释放的问题,这里我们将裸指针赋给了智能指针,这样做潜在的危险就是对象被多次释放。我们加两行打印看一下,打印出智能指针的引用计数是怎样的:
#include <memory>
#include <iostream>
class A
{
public:
A(): mPtr(new int(10))
{
std::cout << "A(), *mPtr = " << *mPtr <<std::endl;
}
~A()
{
std::cout << "~A()" << std::endl;
delete mPtr;
mPtr = nullptr;
}
std::shared_ptr<A> getSharedPtr()
{
std::shared_ptr<A> ptr(this);
return ptr;
}
private:
int *mPtr;
};
int main()
{
std::shared_ptr<A> ptr1(new A());
std::shared_ptr<A> ptr2 = ptr1->getSharedPtr();
std::cout << ptr1.use_count() << std::endl;
std::cout << ptr2.use_count() << std::endl;
return 0;
}
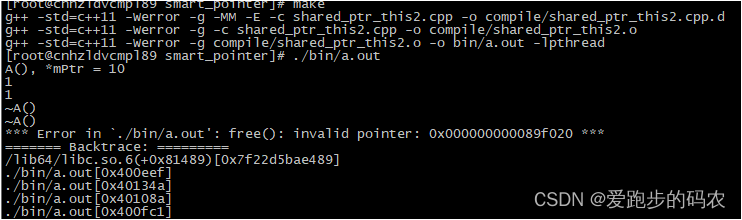
智能指针 ptr1 和 ptr2 的引用计数都是 1,说明它们指向的不是同一个资源(这里可能会有人疑惑两个智能指针指向同一个地址,怎么引用计数没有增加呢?而且在 shared_ptr 的实现中,是不是只在拷贝构造和赋值操作operator=才会增加引用计数呢?)。所以这里两个智能指针,释放两次,而这两次释放的是同一个地址,所以崩溃了。那 enable_shread_from_this 的作用就是解决这个问题,使用如下:
#include <memory>
#include <iostream>
class A: public std::enable_shared_from_this<A>
{
public:
A()
{
std::cout << "A()" << std::endl;
}
~A()
{
std::cout << "~A()" << std::endl;
delete ptr;
ptr = nullptr;
}
std::shared_ptr<A> getSharedPtr()
{
return shared_from_this();
}
private:
int *ptr;
};
int main()
{
std::shared_ptr<A> ptr1(new A());
std::shared_ptr<A> ptr2 = ptr1->getSharedPtr();
std::cout << ptr1.use_count() << std::endl;
std::cout << ptr2.use_count() << std::endl;
return 0;
}
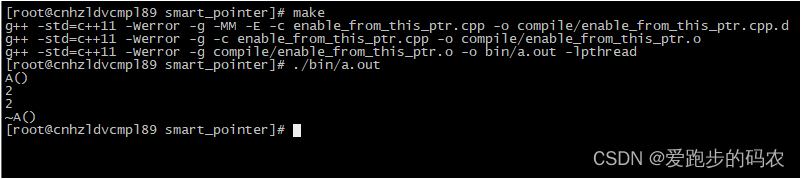
我们看到,两个智能指针的引用计数都为2,这两个智能指针指向了相同的资源,在 main 函数退出后,两个智能指针释放,引用计数变为 0,资源释放正常。

















 438
438

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









