




这年头找工作本就不容易,可谁能想到,还有人因为长得 “不好看” 被拒绝!深圳一位女生小陈,在应聘文员岗位时,就碰上了这么个糟心事。
小陈在招聘平台上看到一家财务管理公司招文员,月薪两三千,想着自己能胜任,就礼貌地发消息询问。哪晓得,对方 HR 直接来了句 “不行,太丑了”。就这四个字,像一盆冷水,把小陈浇了个透心凉。她又气又委屈,“找工作这么久,第一次碰到这么离谱的事儿,气得我话都说不出来。”
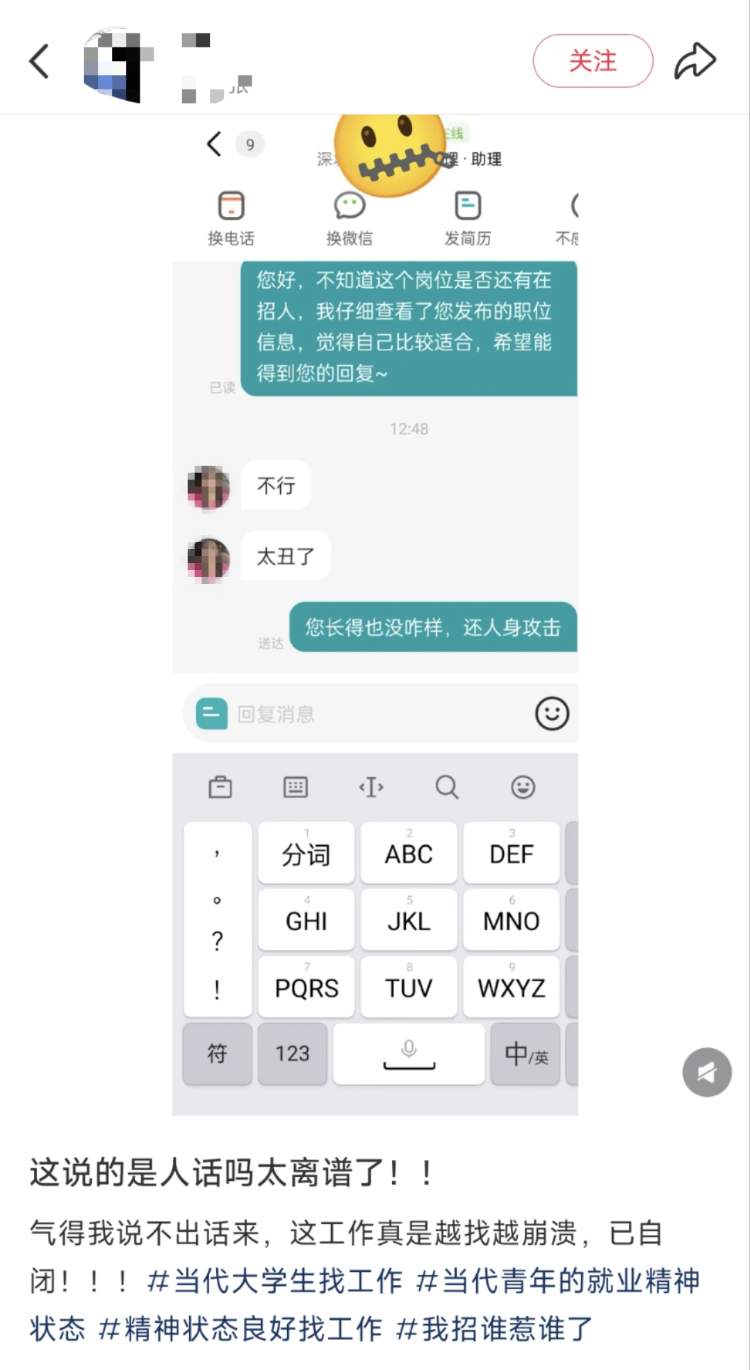
小陈越想越气,就把这段聊天记录发到了社交平台上。这一下,网友们都炸了锅,纷纷替小陈打抱不平。有人说:“这公司也太过分了,招聘看的是能力,又不是选美,咋能因为长相拒绝人呢?” 还有人调侃:“就这两三千的工资,还想招天仙啊?” 更有热心网友,直接把头像换成该公司负责人的照片,在招聘软件上用同样的话 “回敬” 对方,帮小陈出出气。

记者联系上涉事公司负责人韩女士,询问为啥这么回复求职者。韩女士轻飘飘地说:“是下面人回的,不用管。” 对于网友们的反击,她还一脸不屑,说网友们 “吃饱了没事干”。这态度,简直比那句 “太丑了” 还让人来气。公司出了这档子事儿,不反思、不道歉,还这么傲慢,这管理和企业文化,真的让人怀疑。
律师说了,这家公司的行为属于就业歧视,侵犯了小陈的平等就业权和人格尊严。按照法律规定,用人单位招聘时,不能因为民族、种族、性别、宗教信仰,当然也包括长相,去歧视求职者。除非是像演员、模特这类对相貌有特殊要求的行业,可文员明显不在此列。小陈完全可以要求公司赔礼道歉,还能向劳动监管部门举报,让他们依法查处。
其实,就业歧视的事儿可不少见。年龄歧视,“只要 35 岁以下”;性别歧视,“已婚未育不要”;学历歧视,“非 985、211 不要”。这些歧视就像一道道门槛,拦住了不少求职者的路。而这次因为外貌拒绝求职者,更是把就业歧视的 “遮羞布” 扯了个干净。
希望通过这件事,企业能明白,招聘是双向选择,尊重求职者就是尊重自己。也提醒各位求职者,遇到就业歧视,别忍气吞声,一定要勇敢站出来,用法律武器维护自己的权益。就业市场,真该好好整治整治这些不合理的歧视现象了!
喜欢该文章可给个三连击:点赞、转发、在看;想第一时间接收到推文加个星标⭐️就好了,我们下期再见!

















 953
953

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









