




遇到购物节这样的流量洪峰,运维团队需要紧急扩容上百个 AI 应用容器,但每个容器背后数 GB 大小的镜像,让“秒级扩容”成了奢望。这并非个例。数据显示,容器启动时间有 76% 都耗费在镜像下载上,而其中真正被读取的数据可能仅有 6.4%[1]。

镜像“肥胖”导致的性能瓶颈和资源浪费,已成为云原生时代的公认难题。随着 AI 与大模型应用对算力弹性提出更高要求,这一难题也从可容忍的代价,演变为必须攻克的核心障碍。
而当各大云厂商在各自优化的道路上陷入“按下葫芦浮起瓢”的困境,OpenCloudOS 社区选择通过一场开源大赛,邀请全球开发者共同来探索最优解。
// Part 1
被“肥胖”镜像拖慢的云原生时代
“肥胖”的镜像,消耗的是真金白银。这种浪费体现在三个层面:
●仓库磁盘浪费:多个业务团队基于同一基础镜像(如 OpenCloudOS)进行定制,哪怕所安装的软件只存在细微差异,都会导致多个镜像层无法共享,导致海量重复数据堆积在仓库中,显著推高存储成本。
●节点磁盘浪费:当这些相似镜像被拉取到同一工作节点时,节点磁盘上会保存多份几乎完全相同的基础文件,而又分别隶属于多个镜像层。
●内存浪费:运行起来的容器,甚至无法共享相同的基础库文件代码段,导致内存利用率大幅降低。
其最直接的影响是业务敏捷性。在高并发拉取场景下,全量下载镜像的模式极易打满仓库的网络带宽,使业务扩容速度直接卡死在下载阶段。
在 AI 算力需求弹性极高的今天,这一问题被急剧放大。我们面临的是这样一个局面:存储和带宽成本在持续浪费,而业务的敏捷性却深受制约。
// Part 2
修补式的优化陷入两难困境
问题的核心指向了容器镜像的现行标准——OCIv1。其分层叠加和 tar 打包机制,虽然带来了构建的灵活性,却也造成数据重复。简单来说,这就像将一份多次修改的文档,每次都将全文重新打包,而这也导致网络传输负担沉重,更拖慢了容器启动。
对此,业界并非无动于衷。主流方案主要分为两类:一类是兼容现有格式的修补方案 (如 estargz),另一类是自定义镜像格式方案。前者为保证兼容性而牺牲了部分性能潜力,后者性能潜力更大,却牺牲了兼容性,顾此失彼。
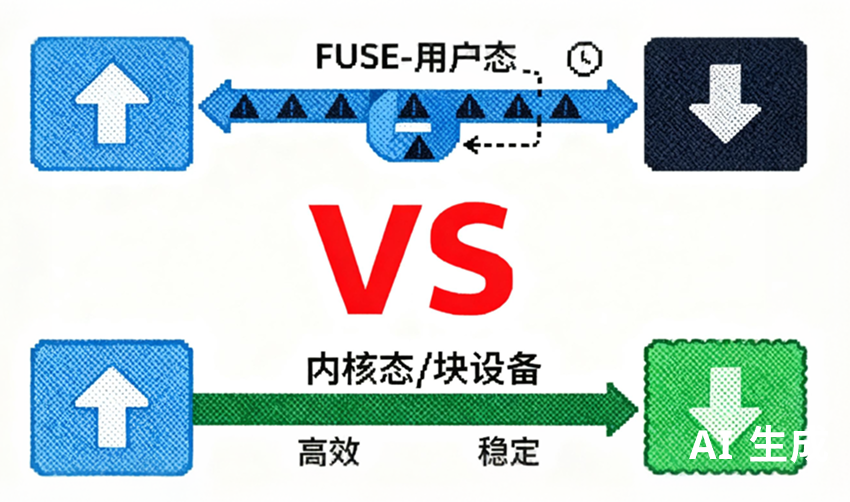
在实现技术上,早期方案多依赖于 fuse(用户态文件系统),它虽然灵活,但也存在明显的短板:性能开销大,且一旦用户态进程崩溃,整个文件系统都可能不可用,稳定性堪忧。同时,状态管理复杂,崩溃后恢复困难。此外,所有的操作都需要转发用户态处理,尤其是在小文件频繁访问场景下的性能衰减,让这些方案难以担当重任。
这就好比,大家都在一条年久失修的路上想办法跑得更快,有的给车换零件,有的自己修路,但始终无法从根本上解决道路本身的问题。

// Part 3
新思路:在性能、兼容与效率间寻找平衡
面对困境,OpenCloudOS 社区提出了一个更具平衡性的技术愿景。其核心可概括为三点:不依赖 fuse、保留层、实现数据去重。
●不依赖 fuse:探索更稳定、高效的内核态或块设备拦截机制,从根源上规避 fuse 的性能与稳定性瓶颈;
●保留层:保持对现有 OCIv1 镜像格式的兼容,保证新镜像能在旧环境中正常运行,降低企业迁移成本;
●数据去重:综合利用更精细的文件级去重和块级去重两种技术,最大限度消除不同镜像层或不同镜像之间的冗余文件,节省存储和带宽。
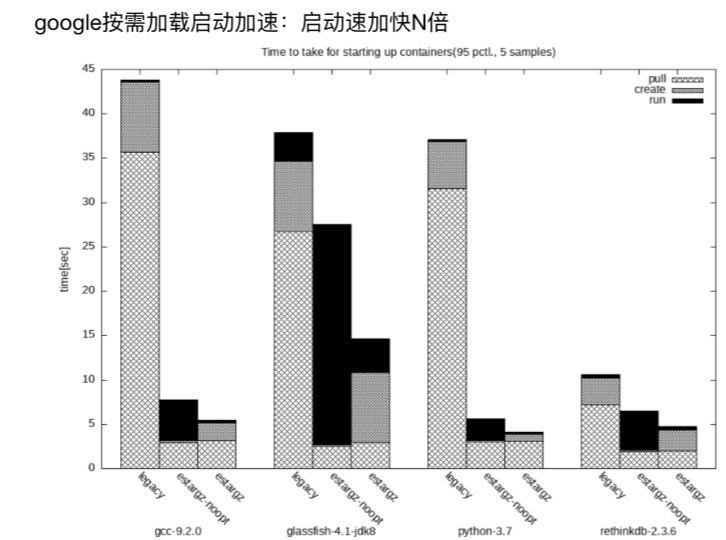
这一追求高效且兼容的思路,与行业先行者如 Google 的实践方向不谋而合。Google 通过容器按需加载技术,实现了启动速度加快 N 倍,有力地证明了该方向的潜力与价值。而 OpenCloudOS 的探索,旨在将这一方向转化为更具普适性的开源实现,解决在兼容性与工程化上的核心挑战。
数据来源:
https://github.com/containerd/stargz-snapshotter
然而,这套理想系统的设计挑战巨大,其根源在于它需要从根本上优化一套全球通用的底层标准,这注定是一个行业级的共性难题。
// Part 4
从开源共建到技术角逐
为了攻克这一行业级难题,OpenCloudOS 在2025年开放原子大赛中设立了“高效的容器镜像按需加载和去重方案”赛道,希望以开源共建的方式寻求突破。经过评审团对全球参赛方案的严格初审,6 支参赛团队及其技术方案已成功入围决赛,这些方案在实现“不依赖 fuse、保留层、数据去重”等目标上,展现了多样化的技术路径与创新思维。
决赛阶段,优胜方案将有机会融入腾讯 OpenCloudOS 生态,在千万级节点中验证价值,优胜队伍最高还可获得 5 万元奖金,并获得腾讯操作系统研发团队的实习面试机会。这不仅是与顶尖同行切磋的机会,其成果还可能推动行业标准演进,定义下一代镜像规范。
作为装机量超千万节点的开源操作系统,OpenCloudOS 的此次赛题,正是其“开源共建”理念的实践。
现在,赛事已进入白热化阶段。OpenCloudOS 诚挚邀请每一位关注基础软件发展的开发者,扫码了解入围团队的技术方案亮点,并持续关注决赛的后续角逐,共同见证下一代容器镜像标准的雏形诞生。
👉 点击查看赛题详情及入围名单:
https://competition.atomgit.com/competitionInfo?id=aec4820b93a8d0380dc3d28d5fd0ca32&utm_source=1112
[1]来源:
https://brooker.co.za/blog/2023/05/23/snapshot-loading.html#:~:text=Container%20loading%20in%20AWS%20Lambda
以及
https://www.usenix.org/system/files/atc20-li-huiba.pdf
#开源 #基础软件 #腾讯 #开放原子大赛

















 312
312

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









