



 2020年上线的自毁网站因独特设计引发关注,24小时内无新帖即销毁数据。尽管没有商业目标,却因网友自发参与而走红,成为疫情期间的共情空间。随着网站关闭,它成为互联网记忆中的一段佳话。
2020年上线的自毁网站因独特设计引发关注,24小时内无新帖即销毁数据。尽管没有商业目标,却因网友自发参与而走红,成为疫情期间的共情空间。随着网站关闭,它成为互联网记忆中的一段佳话。
如果说一个网站需要网友自发续命,你觉得它能坚持多久?
当然,这里说的续命,不是说需要网友打赏给服务器和域名续费,而是字面意思上的「没人用,就自毁」。
你可以说它自恋,可以说它傲娇,但相信我,这个网站的背后是一个独属于互联网的浪漫故事。
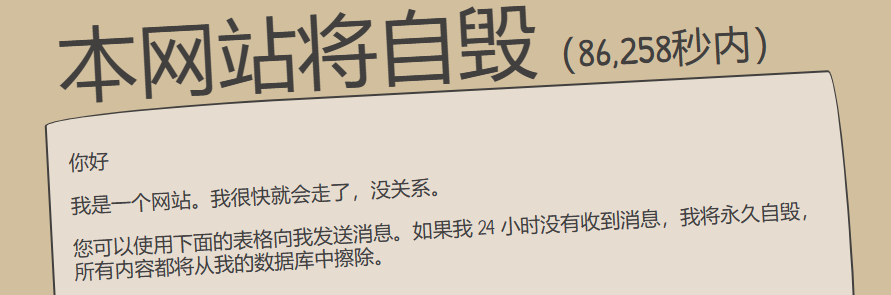
2020 年 4 月,在新冠疫情正值高峰的日子,一个名叫「This website will self destruct」的网站悄然上线。
名字怪,功能也怪,网站仿佛是在威胁用户一样:只要24小时内没收到网友发来的帖子,网站便会自动关闭,并销毁一切数据。
与这个功能对应的,是括号里那个不断跳动的倒计时,24×60×60=86400 秒,有人发帖时,这个倒计时才会被重置。
除了这个显眼的倒计时,要说网站还有什么吸引人的点,可能就是它对于用户来说完全匿名。
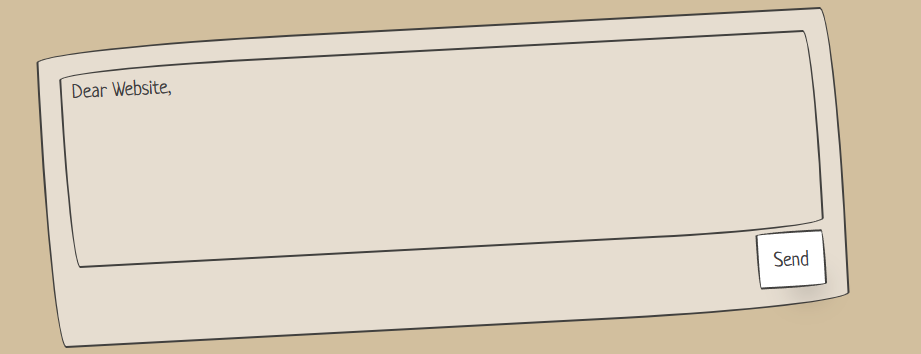
像是一个论坛,既可以为了让网站续命而发帖,也能够表达自己的任何观点。
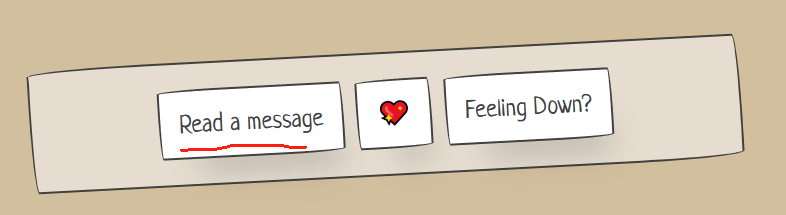
也像是一个漂流瓶,可以随机查看来自全球网友的帖子。
或许你会觉得这样的设计算得上一次有噱头的营销,通过「自毁」来吸引网友的目光,利用「发帖续命」+「匿名」来稳住用户的留存。
拿捏住了网友们的无聊,获得了自来水的曝光,蹭上了互联网的红利,如果顺顺利利,还能挂上个谷歌广告,或许再加个小弹窗——
为了能让网站活得更长久,请大家把网站加入广告拦截工具里的白名单。
当然,上面只是来自过于熟悉「互联网套路」者的想象,如此粗糙又怎么称得上浪漫。
这个自毁网站,从头到尾都没有添加过注册登录的功能,更没有让人可以展示信息的主页,查看也好,发帖也罢,统统都是单向的,并不支持回复。
至于前面那些像威胁一样的话语,其实还有下半句:
不过没关系。
这个网站的初衷,可能没有那么伟大,作者当时参加了一个主题为「让它活着」的比赛,倒计时的设计是为了完成这个命题作文。
前后花了 4 个小时提交的参赛作品,自然不存在什么营销、盈利、商业价值,甚至作者都没想过自毁网站能够真的续命。
可能是哪位网友觉得无聊顺手敲了几下键盘,可能是哪位网友只想发帖吐槽作者,谁也没想到,真的有人愿意玩上一场「为网站续命」的游戏。
在这个自毁网站上,能看到不幸者的迷茫:

能看到个人的焦虑:
能看到新年祝福:
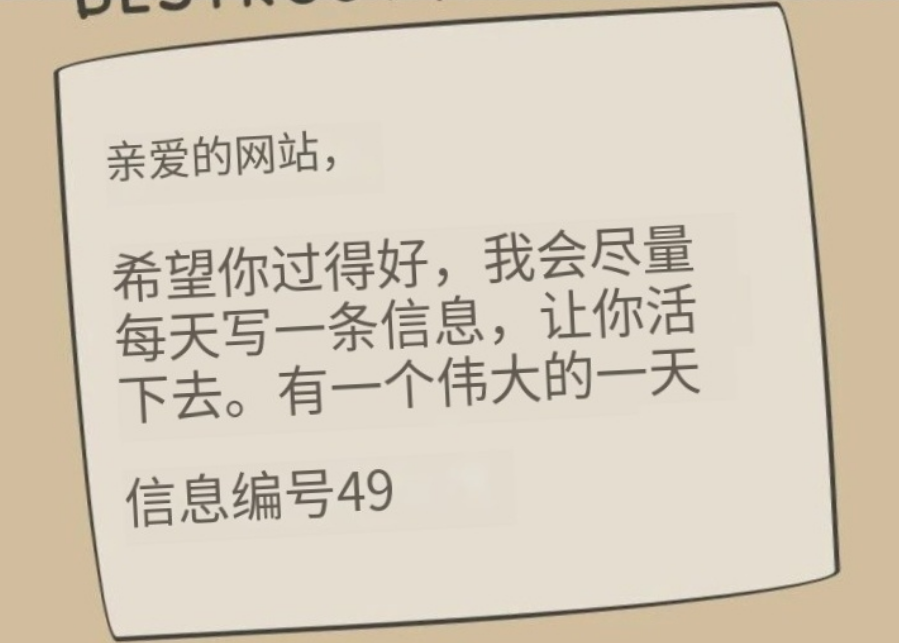
也能看自我鼓励:
是的,自毁网站上的帖子可能不全都是「正能量」,但它真真切切提供了一个,哪怕再艰难,也可以不把话憋肚子里的安全屋。
在网友的自发努力下,这个网站很快就火了:两天时间,自毁网站就收到了 1.5 万条留言,超过100万次查看,1 年后,自毁网站收录了近 20 万条留言。
1 年、2 年、3 年,为了能够守护这个安全屋,能够每一年都看到那句「网站在网友的接力下又活了一年」的喜讯,这 8 万多秒的倒计时,一直没有走向终点。
甚至每年,你都有机会在新的平台看到自毁网站的身影,这个诞生于疫情的网站,陪着网友度过了漫长的疫情。
但,有相逢,自然就会有离别。
自毁网站没能迎来自己的第四个生日,再次访问时,你只能看到 520 的报错页面。
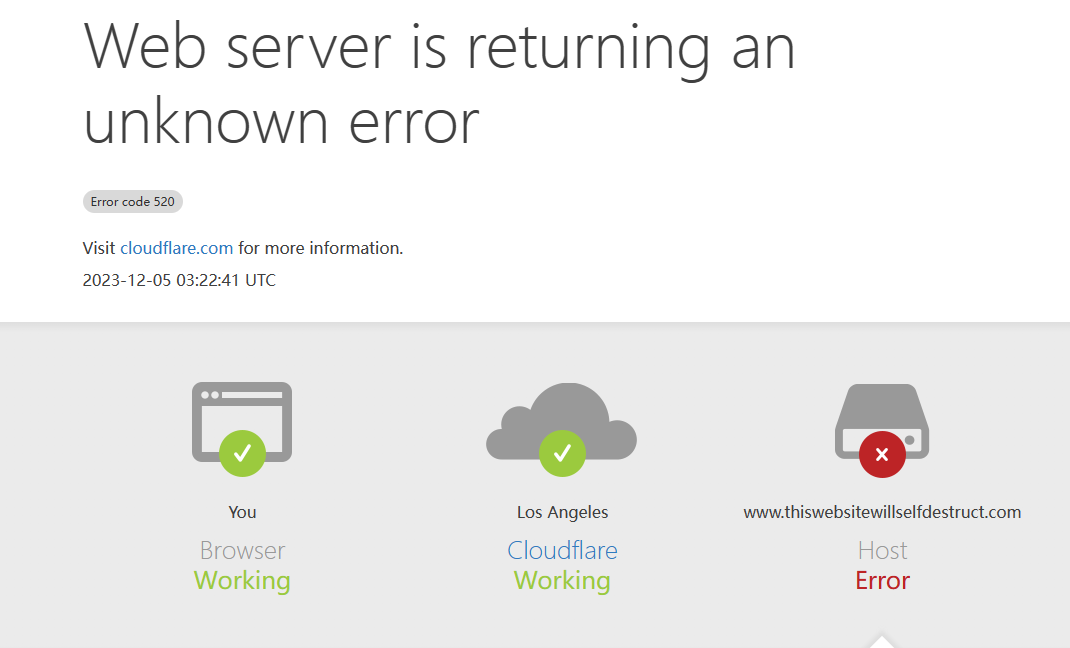
这意味着,已经超过24小时没有人给自毁网站发送信息,12 月 3 日,作者发帖确认了网站的自毁。
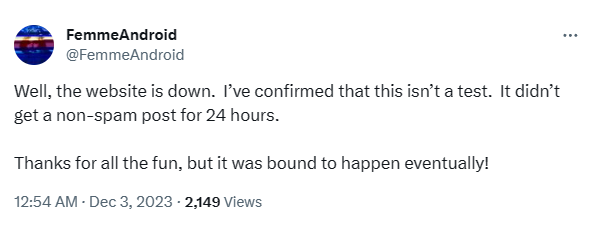
很遗憾,这个网站还是走到了尽头。
来自世界各地,包含了喜悦、祝福、鼓励,也包含着焦虑、困惑、迷茫的数十万帖子,也随之删除。
你可以说,这是疫情结束,人们拿起了遥控器选择了换台;也可以说,互联网自始至终就没有永恒的记忆。
但我是觉得,它已经完成了自己的使命,不是吗?
就像一个虚构出来带着浪漫色彩的故事,到了落幕的时刻,是 happy ending,还是 bad ending 显得已经不那么重要了。
遗忘才是最终的死亡,在一个又一个 8 万秒里,它一直在说——
嘿,朋友,是时候开启新的旅途了。
文章来源:网罗灯下黑

















 666
666

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









