



title: 【Linux】简易进程池
date: 2024-08-02 20:02:48
tags:
cover: https://picbed0521.oss-cn-shanghai.aliyuncs.com/blogpic/202409230843742.png

原文及更多原创文章见我的网站: www.supdriver.top
原理
匿名管道可用于父子进程间的通讯,于是可以有父进程创建多个子进程形成进程池,并通过匿名管道文件向各个子进程派发任务
这里使用C++编写进程池代码,在程序中创建多个进程,并在父进程中使用自定义类channel用于描述和管理子进程,然后在task.hpp中模拟一些任务给主程序随机派发
代码
代码规范
这次对形参有了新的规范,这里用variable代指形参名
- 输入:
const &variable - 输出:
*variable - 输入输出:
&variable
准备makefile文件
这里使用g++编译,规定语法标准为C++11
processPool:processPool.cc
g++ -o $@ $^ -std=c++11
.PHONY:clean
clean:
rm -rf processPool
准备任务文件
首先要准备前后需要用到的头文件,然后构建模拟任务,并提供加载任务列表的函数
task.hpp
#pragma once
#include <vector>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <cassert>
#include <iostream>
#include <string>
typedef void (*task_t)();//定义函数指针
void task1()
{
std::cout << "PVZ 刷新日志" << std::endl;
}
void task2()
{
std::cout<< "PVZ 生成阳光"<<std::endl;
}
void task3()
{
std::cout<<"PVZ 检测更新" <<std::endl;
}
void task4()
{
std::cout<<"PVZ 使用能量豆"<<std::endl;
}
void LoadTask(std::vector<task_t>*tasks)//载入任务列表的接口
{
tasks->push_back(task1);
tasks->push_back(task2);
tasks->push_back(task3);
tasks->push_back(task4);
}
编写主程序
主程序文件名为processPool.cc,我们按类和接口从上往下编程
描述和组织
我们把头文件准备好,然后定义最大进程数和创建任务列表,接着创建channel类来描述每个进程池中的子进程
#include "task.hpp"
#include <ctime>//获取时间戳
#include <sys/stat.h>
#include <sys/wait.h>
const int processNum = 5;//最大进程数
std::vector<task_t> tasks;//承载任务的映射列表
//先描述
class channel
{
public:
channel(int cmdfd,pid_t slaverid,std::string& name)
:_cmdfd(cmdfd),_slaverid(slaverid),_processname(name)
{}
public:
int _cmdfd; //发送任务的文件描述符
pid_t _slaverid; //子进程的id
std::string _processname; //子进程的名字 --方便打印日志
};
slaver函数
创建子进程后,子进程都进入slaver函数等待获取任务
这里统一采用输入重定向,在创建子进程后,进入slaver()前先把标准输入重定向到管道文件,然后从标准输入读取任务码
void slaver()
{
while(true)
{
int cmdcode = 0;
int n = read(0,&cmdcode,sizeof(int));//读取任务码
if(n == sizeof(int))//成功获取任务码
{
//std::cout<<"child say@ "<<"get cmdcode: "<<cmdcode<<std::endl;//DEBUG
if(cmdcode >=0 && cmdcode < tasks.size())//输入合法的输入码
{
tasks[cmdcode]();
}
else //输出错误信息
{
std::cout<<"wrong cmdcode: "<<cmdcode
<<" max size: "<<tasks.size()<<std::endl;
}
}
}
}
InnitChannels
该函数用鱼创建子进程,创建子进程,并封装进频道类
void InitChannels(std::vector<channel>* channels)
{
for(int i = 0;i<processNum;i++)
{
int pipefd[2];
int n = pipe(pipefd);
assert(!n);
(void)n;//调用一下n
pid_t id = fork();
if(id == 0)//child
{
close(pipefd[1]);
dup2(pipefd[0],0);//子进程输入重定向
slaver();
std::cout<<"proccess "<< getpid() << " quit"<<std::endl;
exit(0);
}
//father
close(pipefd[0]);
std::string name = "process-"+std::to_string(i);
channels->push_back(channel(pipefd[1],id,name));
}
}
channelDEBUG
这里封装一个用于测试创建频道的DEBUG函数
void Debug(const std::vector<channel> channels)
{
for(auto &c:channels)
{
std::cout<<c._cmdfd << " " << c._slaverid<< " " << c._processname << std::endl;
}
}
ctrlSlaver
这里封装一个ctrlSlaver用于控制子进程,也就是用于派发任务的函数
void ctrlSlaver(const std::vector<channel> &channels)
{
for(int i = 0;i<10;i++)//随机派发10个任务
{
int cmdcode = rand() % tasks.size();//获取随机任务码
int select_num = rand()%channels.size();//获取选择码
std::cout<<"father say# "<<"taskcode: "<<cmdcode<<" send to "<<channels[select_num]._processname
<< std::endl;//输出日志
write(channels[select_num]._cmdfd,&cmdcode,sizeof(cmdcode));//写入任务码,派发任务
sleep(1);
}
}
QuitProcess
最后当然要有父进程控制关闭子进程,并回收僵尸进程
因为InitChannels中管道文件的处理比较粗糙,会发生如下图的关系,所以关闭时两步操作一定要放在两个循环中
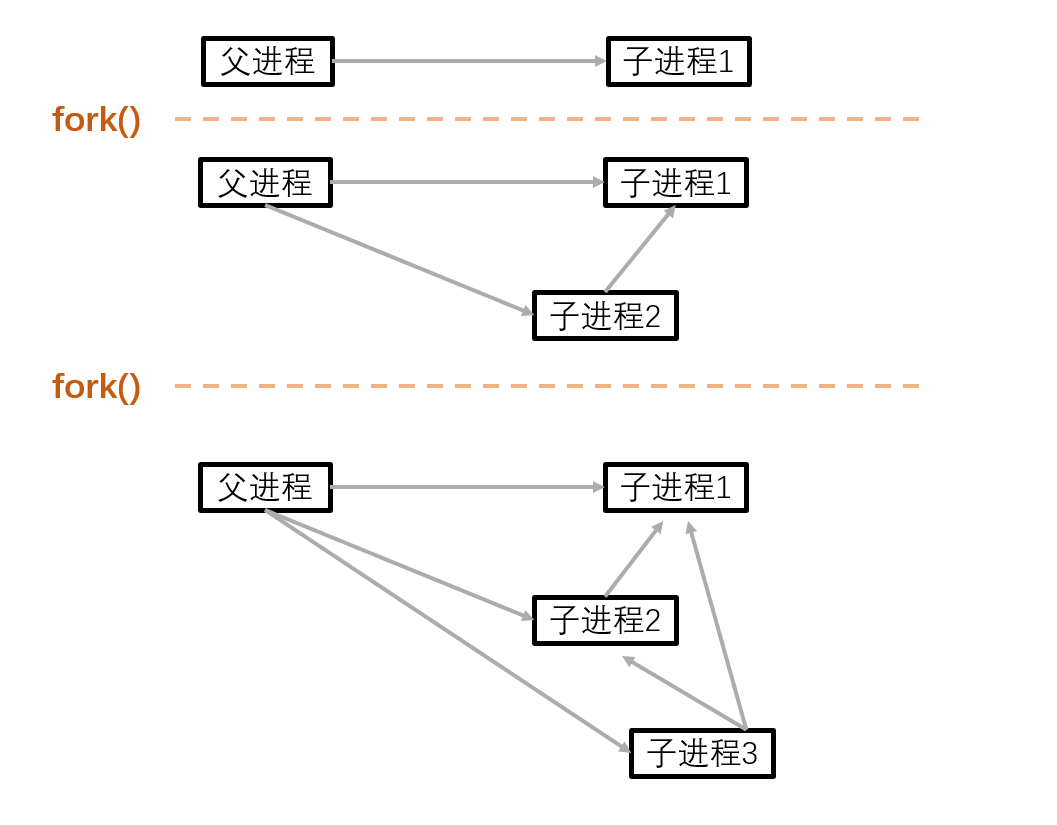
void QuitProcess(const std::vector<channel>& channels)
{
//因为创建子进程时管道文件的连接没有进一步处理,关系复杂,所以下面两个循环一定要分开来
for(const auto &c:channels)close(c._cmdfd);//关闭主进程管道文件的写端,使子进程的read函数读取失败,返回0
for(const auto &c:channels)waitpid(c._slaverid,nullptr,0);//阻塞等待子进程,回收僵尸进程
}
main函数
经过上文一系列封装,main函数就可以简洁明了地描述子进程的运行过程了
int main()
{
srand(time(nullptr) ^ getpid()^1023);//种随机数种子
std::vector<channel> channels;
//1.初始化
LoadTask(&tasks);//必须先载入任务再产生子进程,否则子进程看不到任务列表
InitChannels(&channels);
//测试函数
//Debug(channels);
//2.控制子进程
ctrlSlaver(channels);
//3.关闭进程池
QuitProcess(channels);
return 0;
}

















 451
451

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









