



资料编号:188
一:功能介绍
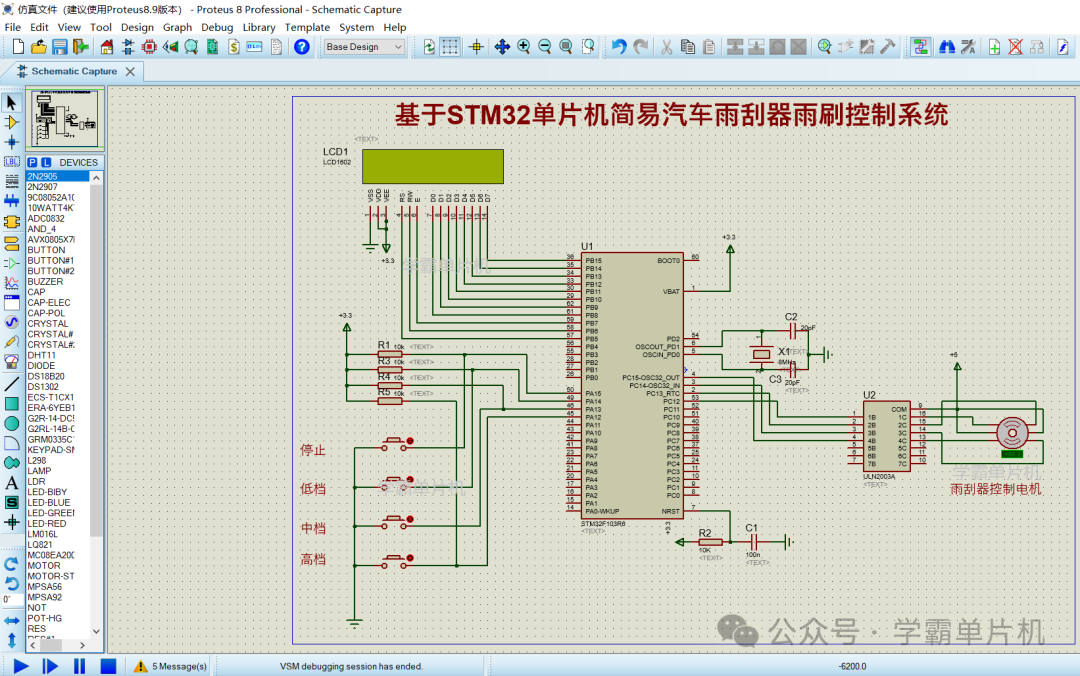
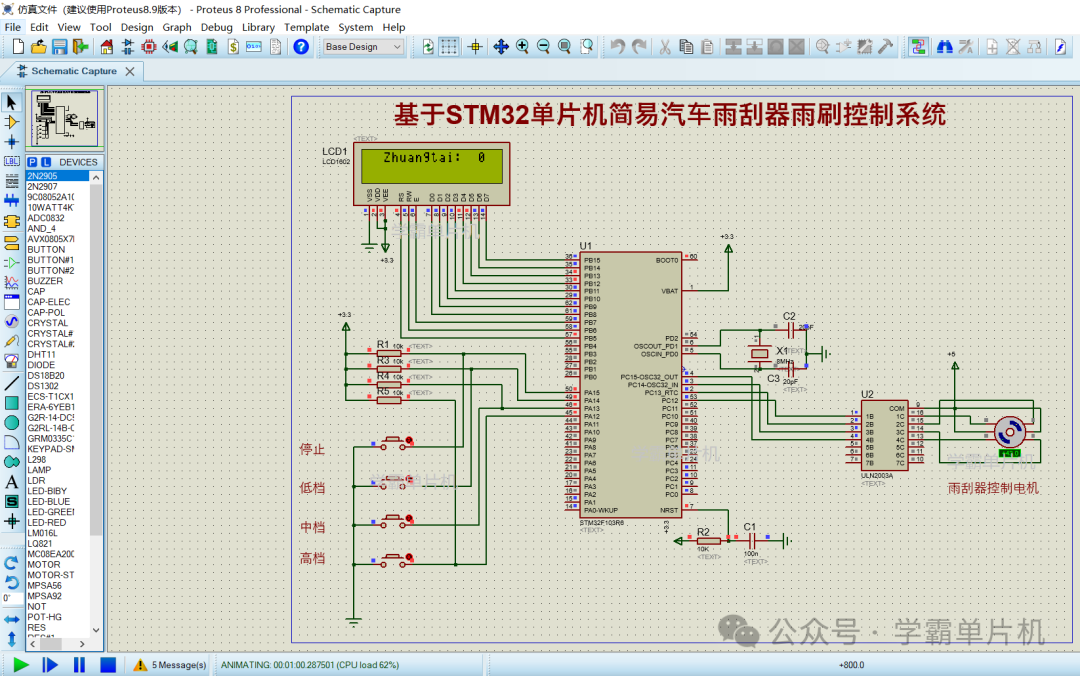
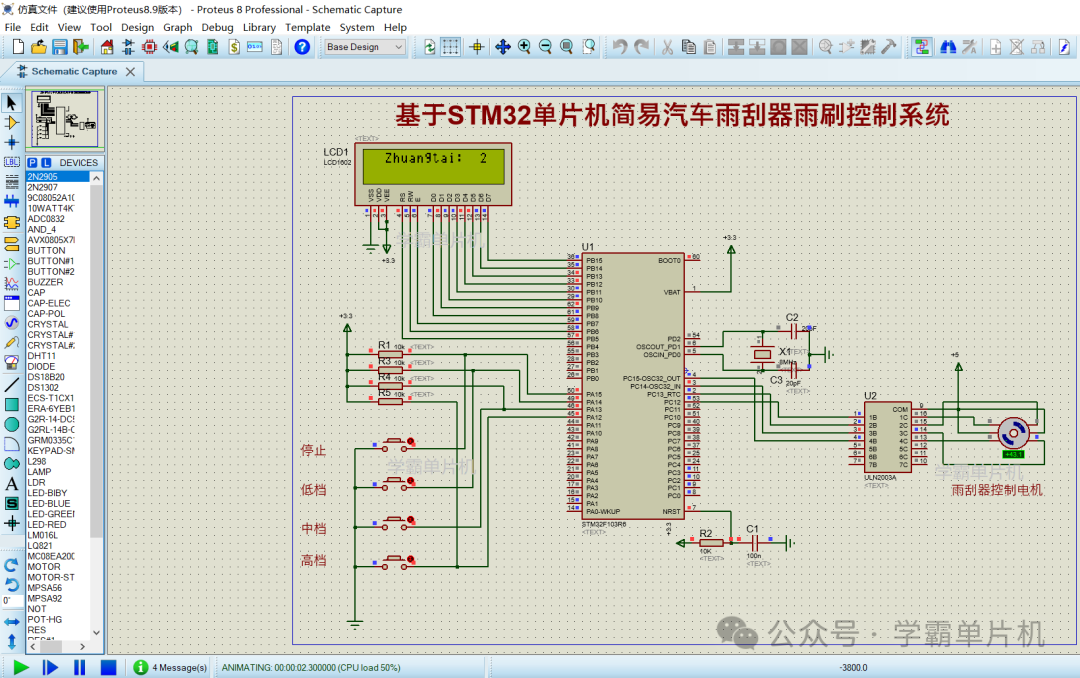
1、采用stm32单片机+LCD1602显示屏+按键+ULN2003驱动芯片+步进电机,制作一个基于STM32单片机简易汽车雨刮器雨刷控制系统Proteus仿真;
2、可以通过控制步进电机转速达到控制雨刷的速度;
3、可以通过按键调节雨刷的快慢和停止,分为停止、低速、中速、高速四个挡位;
4、LCD1602可以显示当前的挡位状态;
二:仿真演示视频+程序简要讲解(程序有中文注释,新手容易看懂)
188-基于STM32单片机简易汽车雨刮器雨刷控制系统Proteus仿真+源程序
三:设计软件介绍
本设计使用C语言编程设计,程序代码采用keil5编写,程序有中文注释,新手容易看懂,仿真采用Proteus软件进行仿真,演示视频使用的是Proteus8.9版本;资料包里有相关软件包,可自行下载安装。
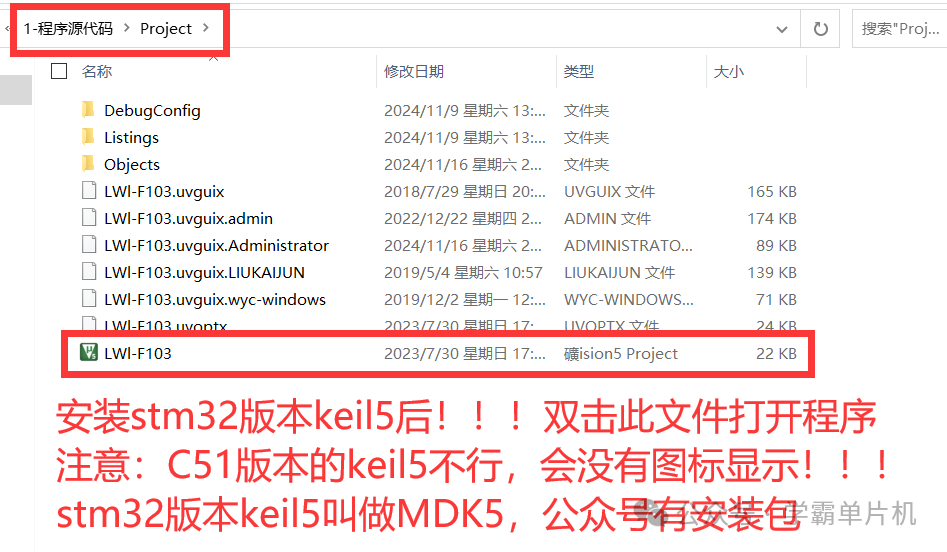
四:程序打开方法
特别注意:下载资料包以后一定要先解压! !!(建议解压到桌面上,文件路径太深会导致程序打开异常),解压后再用keil5打开。
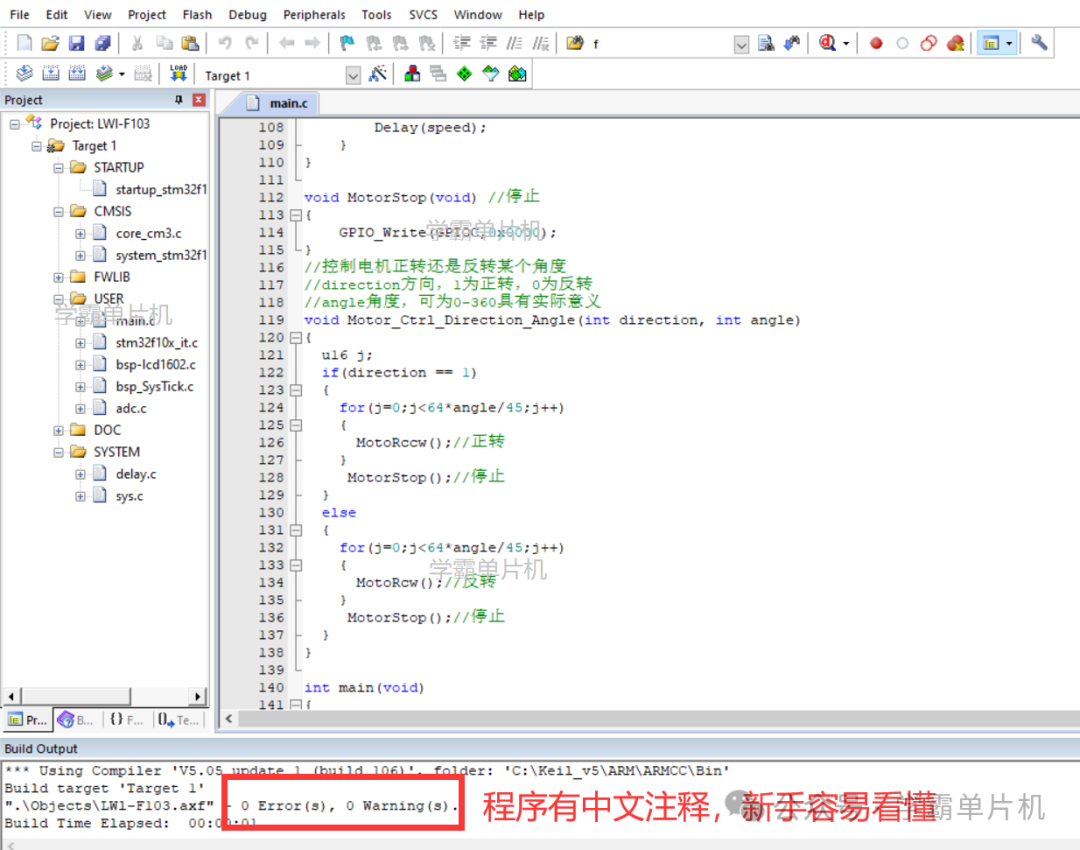
程序部分展示,有中文注释,新手容易看懂
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOC,ENABLE);
//LCD1602 管脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8| GPIO_Pin_9| GPIO_Pin_10| GPIO_Pin_11| GPIO_Pin_12| GPIO_Pin_13| GPIO_Pin_14| GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7 |GPIO_Pin_6|GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 |GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_12 |GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
//按键
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11|GPIO_Pin_12| GPIO_Pin_13| GPIO_Pin_14| GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 |GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
void Delay(uint i)
{
for (;i>0;i--)
{uint j=20000;while(--j);}
}
void MotoRcw(void) //反转
{
int i;
for(i=0;i<4;i++)
{
GPIO_Write(GPIOC,phasecw[i]);
Delay(speed);
}
}
void MotoRccw(void) //正转
{
int i;
for(i=0;i<4;i++)
{
GPIO_Write(GPIOC,phaseccw[i]);
Delay(speed);
}
}
void MotorStop(void) //停止
{
GPIO_Write(GPIOC,0x0000);
}
//控制电机正转还是反转某个角度
//direction方向,1为正转,0为反转
//angle角度,可为0-360具有实际意义
void Motor_Ctrl_Direction_Angle(int direction, int angle)
{
u16 j;
if(direction == 1)
{
for(j=0;j<64*angle/45;j++)
{
MotoRccw();//正转
}
MotorStop();//停止
}
else
{
for(j=0;j<64*angle/45;j++)
{
MotoRcw();//反转
}
MotorStop();//停止
}
}
int main(void)
{
int i=0;
RCC_SYSCLKConfig(RCC_SYSCLKSource_HSI);
GPIO_Configuration();//初始化
Init1602();
WrByte1602(0,2,'Z'); //字符显示
WrByte1602(0,3,'h');
WrByte1602(0,4,'u');
WrByte1602(0,5,'a');
WrByte1602(0,6,'n');
WrByte1602(0,7,'g');
WrByte1602(0,8,'t');
WrByte1602(0,9,'a');
WrByte1602(0,10,'i');
WrByte1602(0,11,':');
WrByte1602(0,12,' ');
WrByte1602(0,13,' ');
WrByte1602(0,14,'0');
delay_ms(500);
while(1)
{
if(PAin(15)==0) //停止
{
i=0;
WrByte1602(0,12,' ');
WrByte1602(0,13,' ');
WrByte1602(0,14,'0');
}
if(PAin(14)==0)//低挡
{
i=1;
WrByte1602(0,12,' ');
WrByte1602(0,13,' ');
WrByte1602(0,14,'1');
}
if(PAin(13)==0)//中档
{
i=2;
WrByte1602(0,12,' ');
WrByte1602(0,13,' ');
WrByte1602(0,14,'2');
}
if(PAin(12)==0)//高档
{
i=3;
WrByte1602(0,12,' ');
WrByte1602(0,13,' ');
WrByte1602(0,14,'3');
}
if(i==1)//第1档运行
{
speed=12;
}
if(i==2) //第2档运行
{
speed=8;
}
if(i==3) //第3档运行
{
speed=4;
}
if(i==0)
{
MotorStop();//停止
}
else //开启雨刮器
{
MotoRccw();//正转
MotoRcw();//反转
}
}
}五:仿真文件(采用Proteus打开)
六:资料清单展示(文件中包含的相关资料)
百度网盘资料包下载链接

















 1418
1418

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









