




并发与并行
并行是让不同的代码片段同时在不同的物理处理器上执行。并行的关键是同时做很多事情,而并发是指同时管理很多事情,这些事情可能只做了一半就被暂停去做别的事情了。在很多情况下,并发的效果比并行好,因为操作系统和硬件的总资源一般很少,但能支持系统同时做很多事情。这种“使用较少的资源做更多的事情”的哲学,也是指导 Go 语言设计的哲学。Go语言使用goroutine来实现并发。
goroutine是go语言自己实现的一个虚拟运行时。操作系统会在物理处理器上调度线程来运行,而 Go 语言的运行时会在逻辑处理器上调度goroutine来运行。每个逻辑处理器都分别绑定到单个操作系统线程。在 1.5 及以后的版本,Go语言的运行时默认会为每个可用的物理处理器分配一个逻辑处理器。在 1.5 版本之前的版本中,默认给整个应用程序只分配一个逻辑处理器。这些逻辑处理器会用于执行所有被创建的goroutine。
在下图中,可以看到操作系统线程、逻辑处理器和本地运行队列之间的关系。如果创建一个 goroutine 并准备运行,这个 goroutine 就会被放到调度器的全局运行队列中。之后,调度器就将这些队列中的 goroutine 分配给一个逻辑处理器,并放到这个逻辑处理器对应的本地运行队列中。本地运行队列中的 goroutine 会一直等待直到自己被分配的逻辑处理器执行。
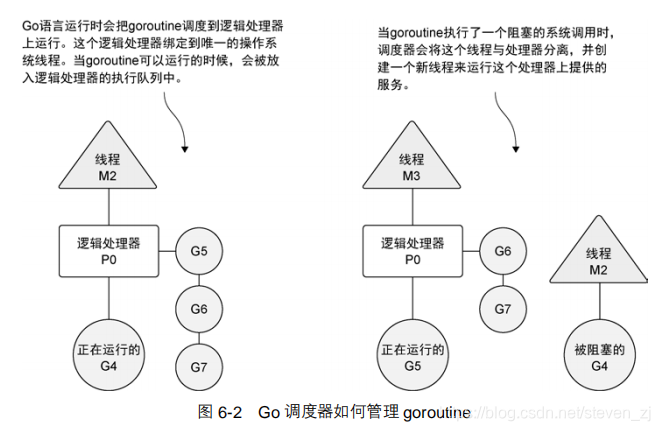
有时,正在运行的 goroutine 需要执行一个阻塞的系统调用,如打开一个文件。当这类调用发生时,线程和 goroutine 会从逻辑处理器上分离,该线程会继续阻塞,等待系统调用的返回。与此同时,这个逻辑处理器就失去了用来运行的线程。所以,调度器会创建一个新线程,并将其绑定到该逻辑处理器上。之后,调度器会从本地运行队列里选择另一个 goroutine 来运行。一旦
被阻塞的系统调用执行完成并返回,对应的 goroutine 会放回到本地运行队列,而之前的线程会保存好,以便之后可以继续使用。
如果一个 goroutine 需要做一个网络 I/O 调用,流程上会有些不一样。在这种情况下,goroutine会和逻辑处理器分离,并移到集成了网络轮询器的运行时。一旦该轮询器指示某个网络读或者写操作已经就绪,对应的 goroutine 就会重新分配到逻辑处理器上来完成操作。调度器对可以创建的逻辑处理器的数量没有限制,但语言运行时默认限制每个程序最多创建 10 000 个线程。这个限制值可以通过调用 runtime/debug 包的 SetMaxThreads 方法来更改。如果程序试图使用更多的线程,就会崩溃。
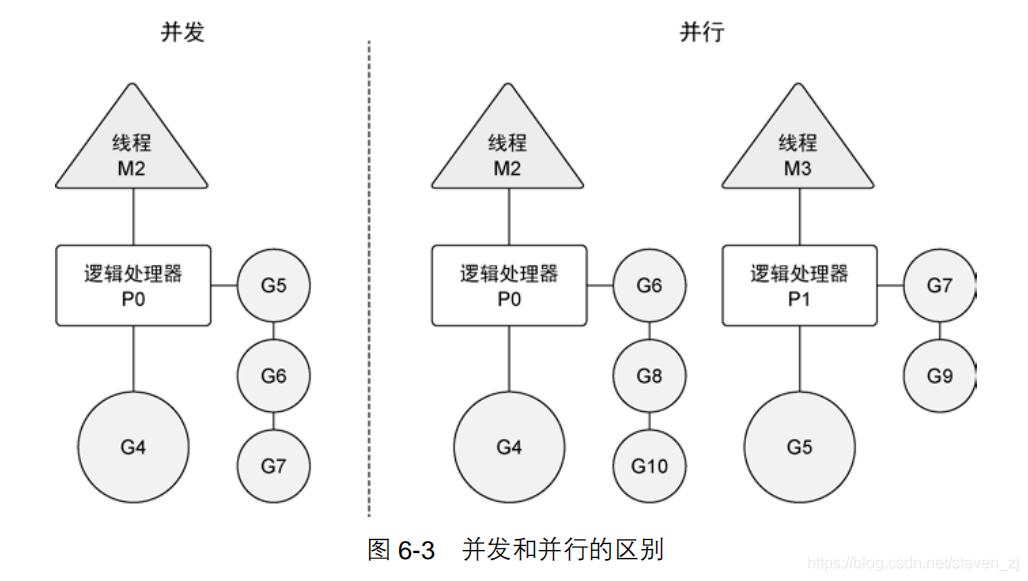
如果希望让 goroutine 并行,必须使用多于一个逻辑处理器。当有多个逻辑处理器时,调度器会将 goroutine 平等分配到每个逻辑处理器上。这会让 goroutine 在不同的线程上运行。不过要想真的实现并行的效果,用户需要让自己的程序运行在有多个物理处理器的机器上。否则,哪怕 Go 语言运行时使用多个线程,goroutine 依然会在同一个物理处理器上并发运行,达不到并行的效果。
go语言中并发与并行的处理如下图:
本文内容源自: 《go语言实战》


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









