



项目运行
环境配置:
Jdk1.8 + Tomcat7.0 + Mysql + HBuilderX(Webstorm也行)+ Eclispe(IntelliJ IDEA,Eclispe,MyEclispe,Sts都支持)。
项目技术:
SSM + mybatis + Maven + Vue 等等组成,B/S模式 + Maven管理等等。
环境需要
1.运行环境:最好是java jdk 1.8,我们在这个平台上运行的。其他版本理论上也可以。
2.IDE环境:IDEA,Eclipse,Myeclipse都可以。推荐IDEA;
3.tomcat环境:Tomcat 7.x,8.x,9.x版本均可
4.硬件环境:windows 7/8/10 1G内存以上;或者 Mac OS;
5.是否Maven项目: 否;查看源码目录中是否包含pom.xml;若包含,则为maven项目,否则为非maven项目
6.数据库:MySql 5.7/8.0等版本均可;
毕设帮助,指导,本源码分享,调试部署(见文末)
系统实现是新系统开发工作的最后一个阶段。它是将结构化系统设计的成果变成可实际运行的系统的过程。这一部分主要对系统的主要功能模块的实现细节进行了详细的阐述。
5.1功能页面实现
按照不同功能模块,在此对系统所涉及的关键页面的实现细节进行阐述,包括页面功能描述,页面涉及功能分析,介绍以及界面展示。
系统登录:运行系统,首先进入登录界面,按照登录界面的要求填写相应的“账号”和“密码”以及用户类型,点击“登录”然后系统判断填写是否正确,若正确进入相应的界面,否则给出要求先注册信息。具体流程如图5-1所示。
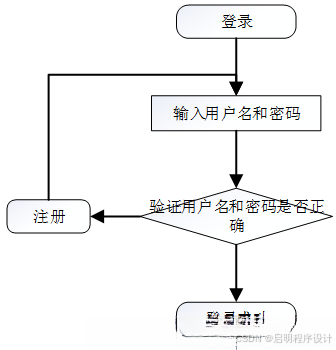
图5-1 登录流程图

















 306
306

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









