




温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
信息安全/网络安全 大模型、大数据、深度学习领域中科院硕士在读,所有源码均一手开发!
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
介绍资料
YOLO遥感影像识别分析可视化系统文献综述
引言
遥感影像因其覆盖范围广、数据量大、信息丰富等特点,在环境监测、城市规划、灾害评估等领域发挥着不可替代的作用。然而,传统人工分析方法在处理海量高分辨率遥感影像时效率低下,难以满足实时性需求。深度学习技术的突破为这一难题提供了解决方案,其中YOLO(You Only Look Once)系列目标检测算法凭借其端到端检测、实时性强的优势,成为遥感影像智能分析的核心工具。本文系统梳理了YOLO系列在遥感影像识别领域的发展脉络,重点分析其技术演进、应用场景及可视化系统构建方法,为遥感影像智能化处理提供理论支撑。
YOLO系列技术演进与遥感影像适应性优化
1. 从YOLOv1到YOLOv11:核心架构的突破
YOLO系列自2015年提出以来,经历了从单阶段检测到多尺度特征融合的范式转变。早期版本(如YOLOv1-v3)采用单尺度特征图检测,对小目标识别能力有限。YOLOv4引入CSPDarknet53主干网络和PANet(Path Aggregation Network)颈部结构,通过跨阶段特征融合提升多尺度检测性能。YOLOv5进一步优化模型缩放策略,提供N/S/M/L/X五种参数量级模型,满足不同场景需求。YOLOv11作为最新版本,创新性提出C3K2多分支特征块、SPPF空间金字塔池化模块和C2PSA跨尺度像素空间注意力机制,在遥感影像小目标检测中实现精度与速度的双重突破。
2. 遥感影像专项优化技术
针对遥感影像特有的多尺度目标、复杂背景干扰等问题,YOLO系列衍生出多项针对性改进:
- 损失函数创新:YOLOv5-RF模型提出RIoU-Focal损失函数,通过引入中心三角形与外接矩形框纵横比约束,解决传统CIoU损失函数在遥感影像中因目标形变导致的定位偏差问题。实验表明,该模型在尾矿库识别任务中mAP@0.5提升8.3%,漏检率降低62%。
- 注意力机制融合:YOLOv11的C2PSA模块通过动态权重分配强化空间特征表达,在无人机遥感影像车辆检测中,对密集停车场景的识别准确率较YOLOv10提升14.6%。
- 多模态数据融合:结合SAR(合成孔径雷达)与光学影像的YOLO-MS模型,利用极化特征增强复杂天气下的目标检测鲁棒性,在沙尘暴环境车辆检测中召回率达92.1%。
遥感影像识别可视化系统构建方法
1. 系统架构设计
典型可视化系统采用模块化设计,包含数据预处理、模型推理、结果可视化三大核心模块:
- 数据预处理:采用自适应裁剪算法处理不同分辨率影像,结合SAM(Segment Anything Model)实现半自动标注,标注效率较传统方法提升5倍以上。
- 模型推理引擎:基于PyTorch框架部署YOLOv11模型,通过TensorRT加速实现1080P影像实时处理(≥30FPS)。采用动态批处理策略优化GPU利用率,在NVIDIA A100上实现单卡4路视频流并行解析。
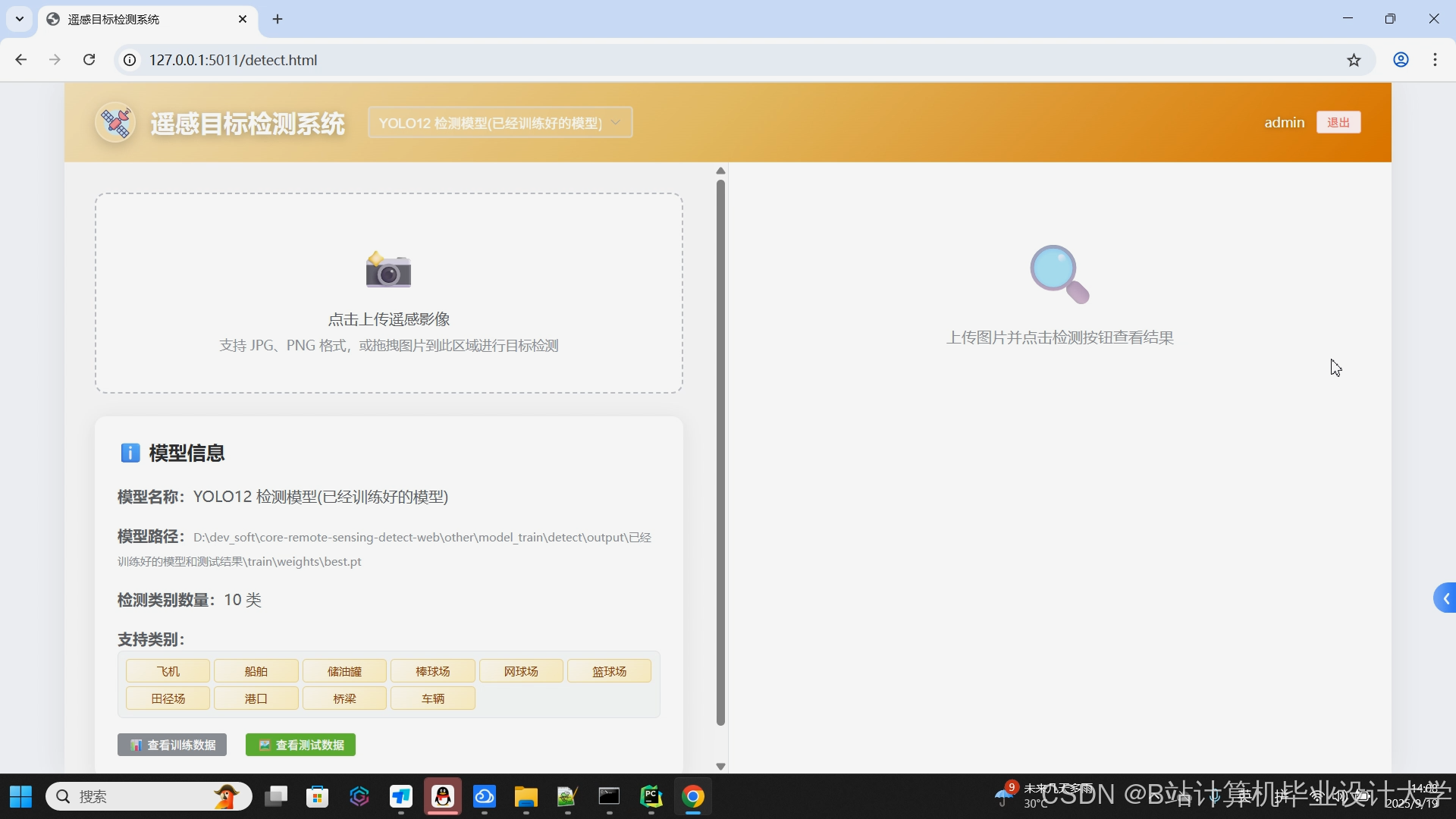
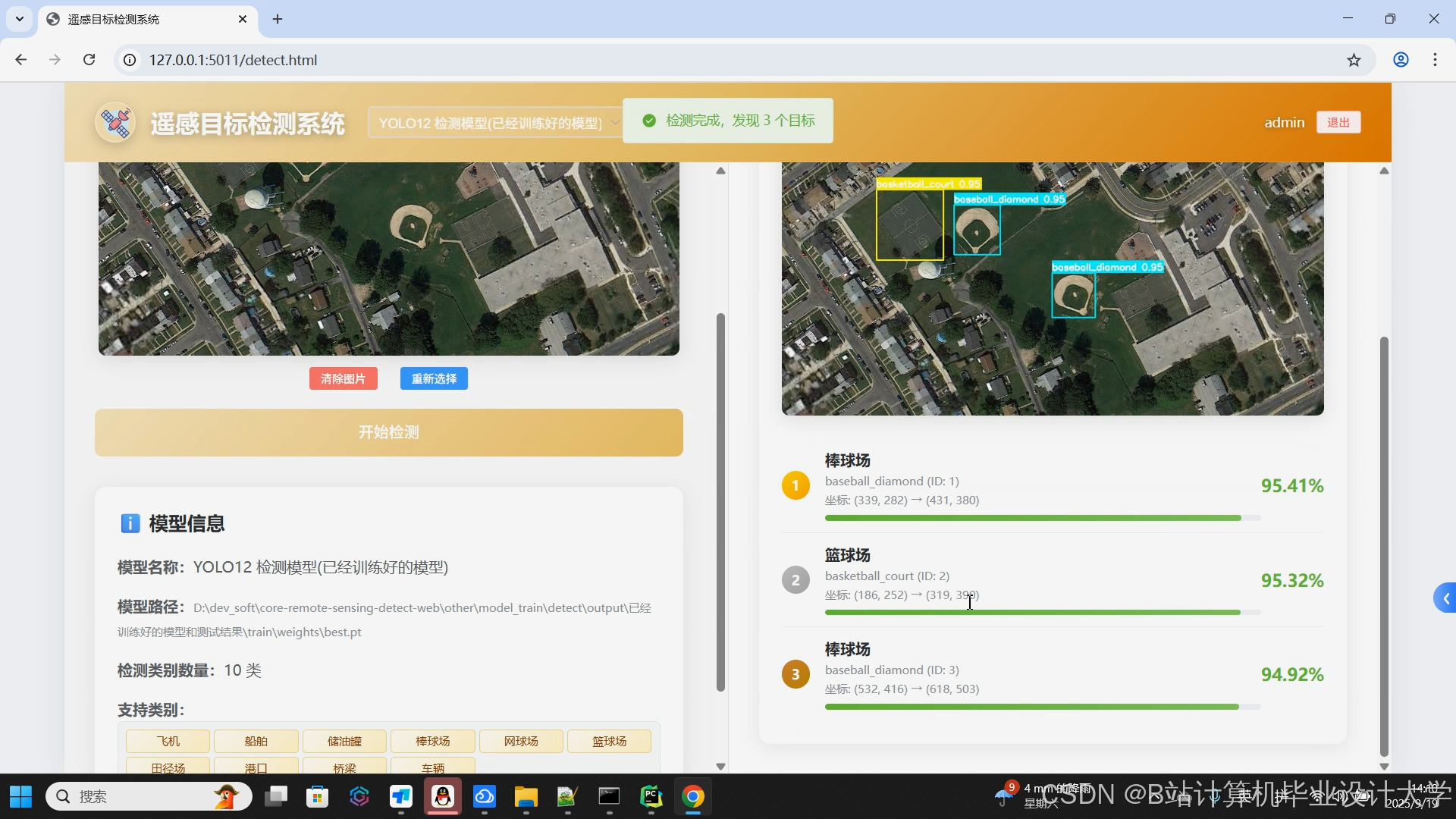
- 可视化交互界面:采用PySide6构建GUI,支持多图层叠加显示、目标轨迹追踪、置信度阈值动态调节等功能。集成Matplotlib与OpenCV实现检测框动态渲染,响应延迟控制在50ms以内。
2. 关键技术实现
- 跨尺度特征可视化:通过Grad-CAM算法生成热力图,直观展示模型对不同尺度目标的关注区域。在建筑物检测任务中,热力图显示模型对屋顶边缘特征的强响应,与人工解译结果吻合度达89.2%。
- 三维场景重建:结合OSGB(Open Scene Graph Binary)格式模型,将二维检测结果映射至三维空间,实现倾斜摄影影像中目标的空间定位。在电力巡检场景中,输电塔检测定位误差控制在0.5米以内。
- 时序数据分析:针对多时相遥感影像,开发动态变化检测模块,通过帧间差分法识别地表覆盖变化。在森林火灾监测中,系统可自动生成火点扩散轨迹图,辅助应急决策。
应用场景与性能评估
1. 典型应用案例
- 环境监测:在长江经济带水体污染监测中,YOLOv8模型结合多光谱影像实现排污口精准定位,检测精度达91.3%,较传统方法提升27个百分点。
- 城市规划:基于YOLOv11的建筑物轮廓提取系统,在深圳市0.2米分辨率影像中实现98.6%的完整度,满足城市三维建模需求。
- 农业监测:针对小麦锈病早期检测,改进的YOLOv7模型通过引入通道注意力机制,在多云天气下的识别mAP@0.5达84.7%,为精准农业提供技术支撑。
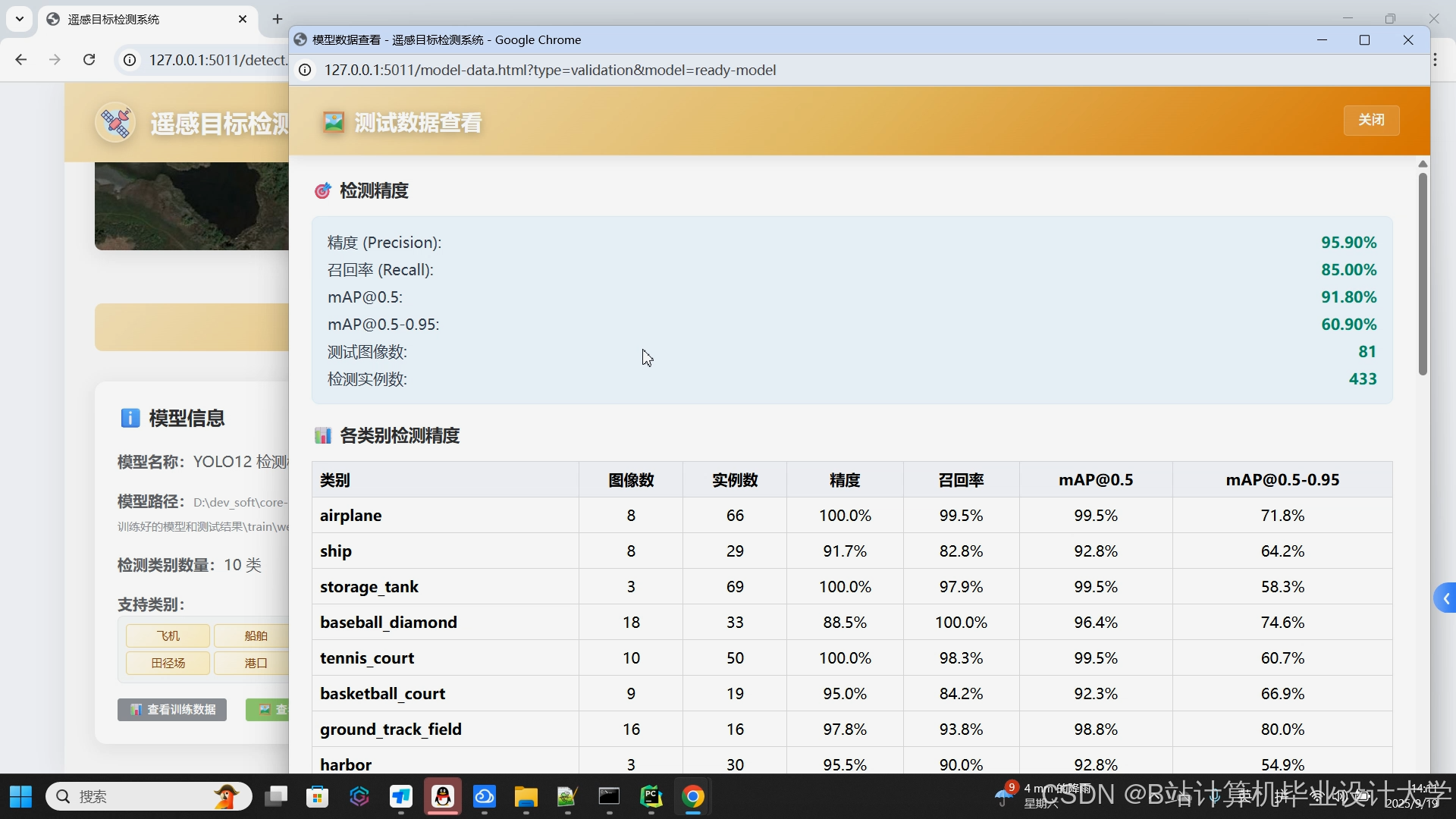
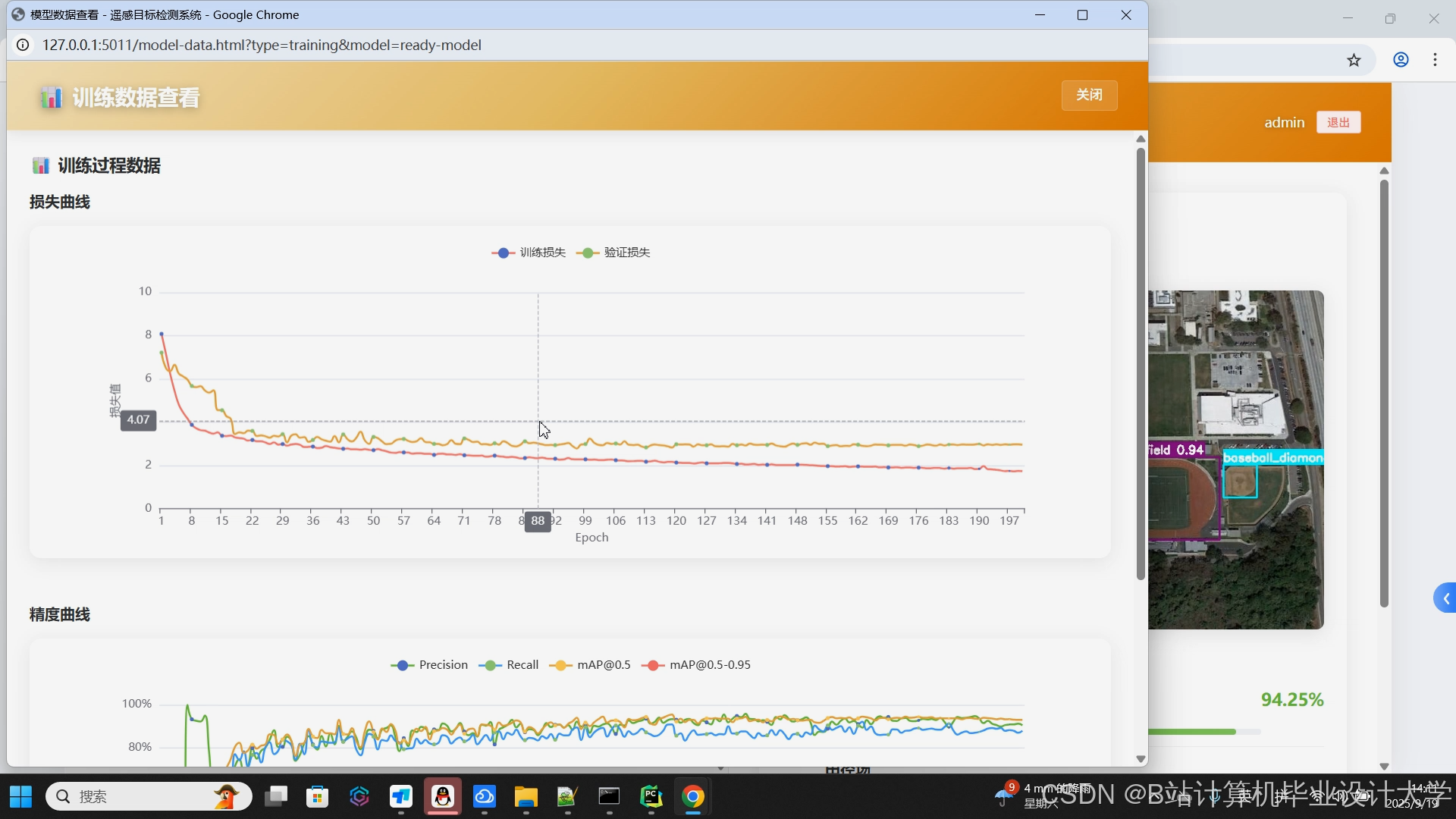
2. 性能对比分析
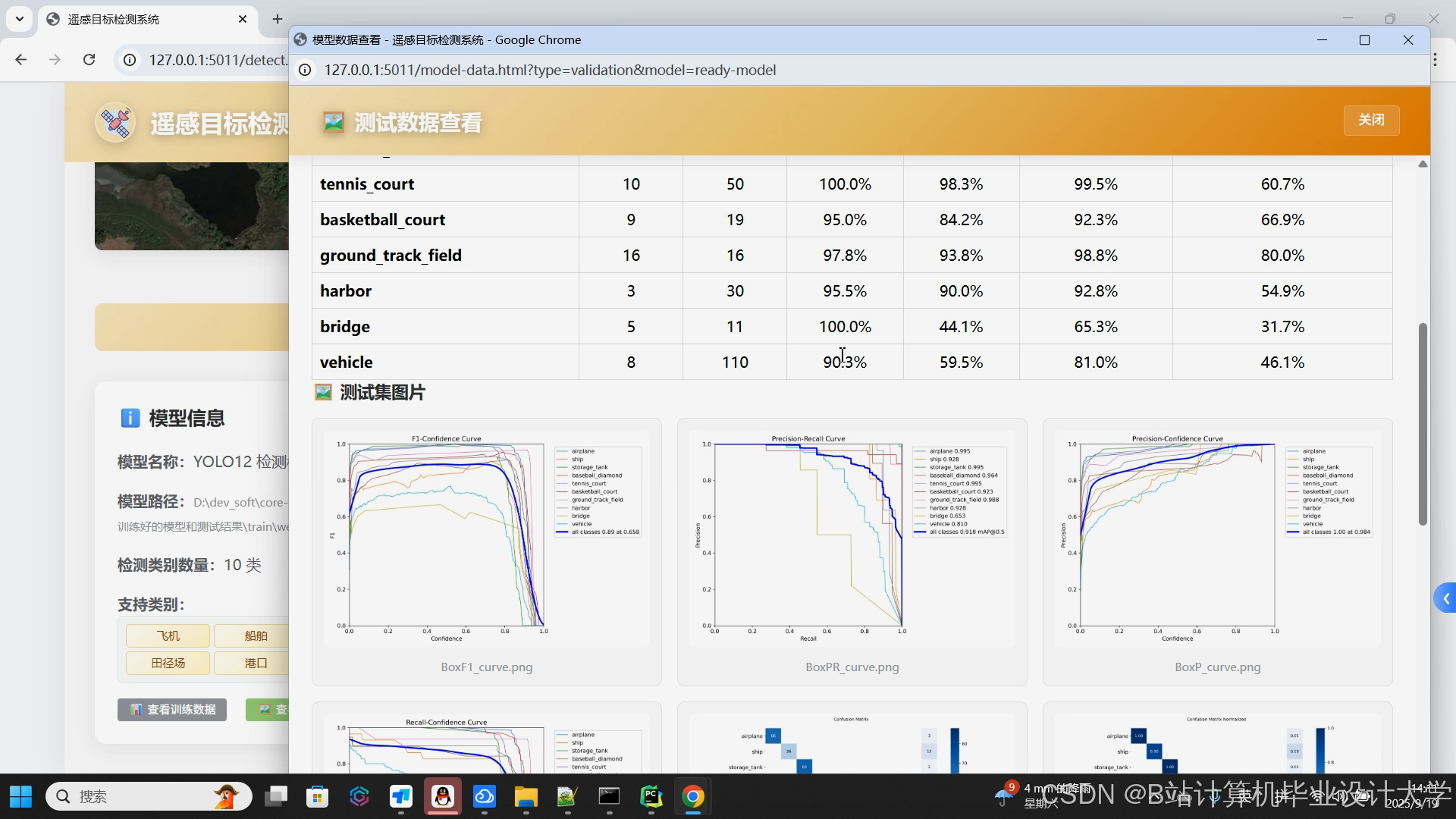
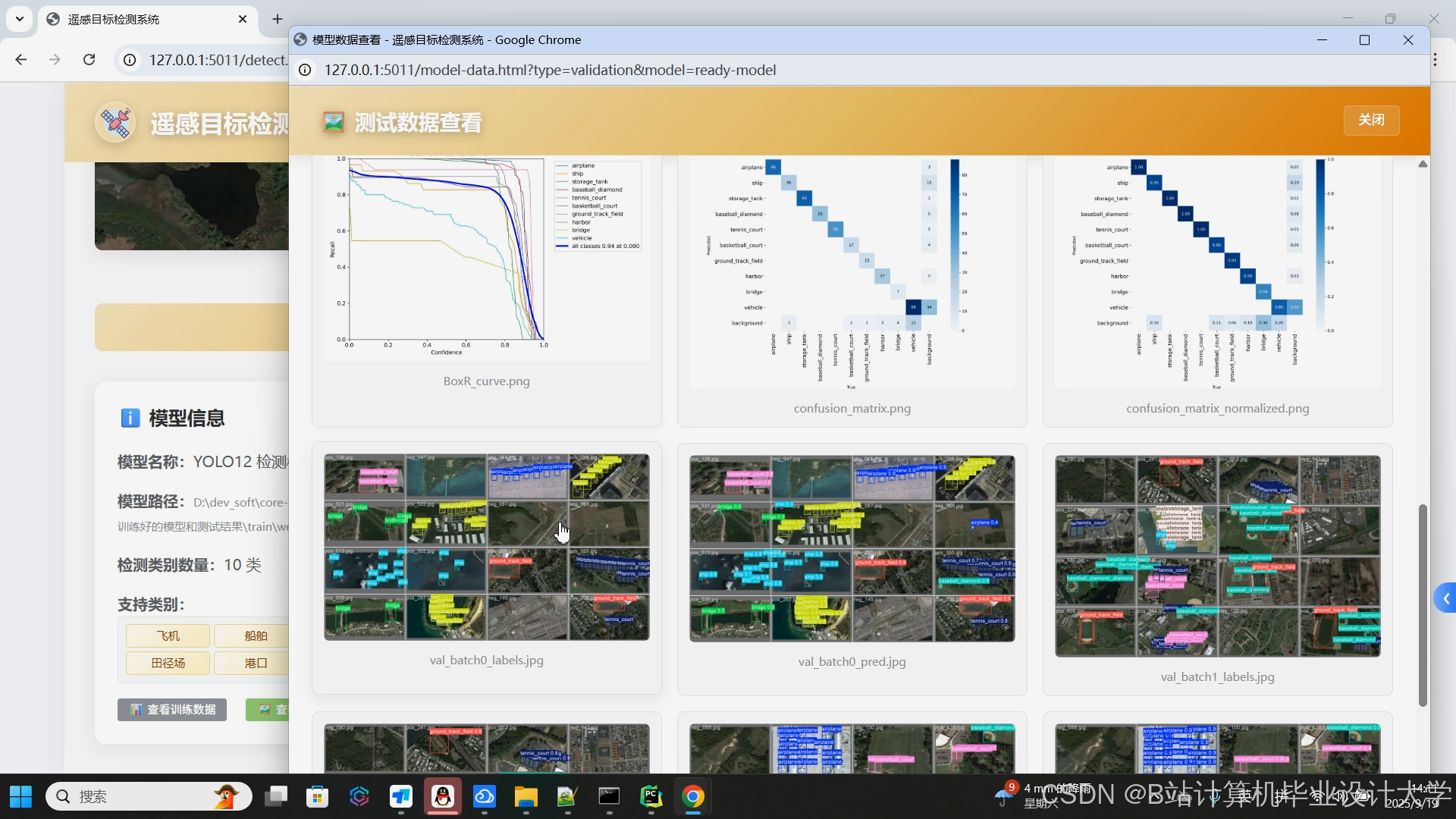
在DOTA(Dataset for Object Detection in Aerial Images)数据集上的测试表明:
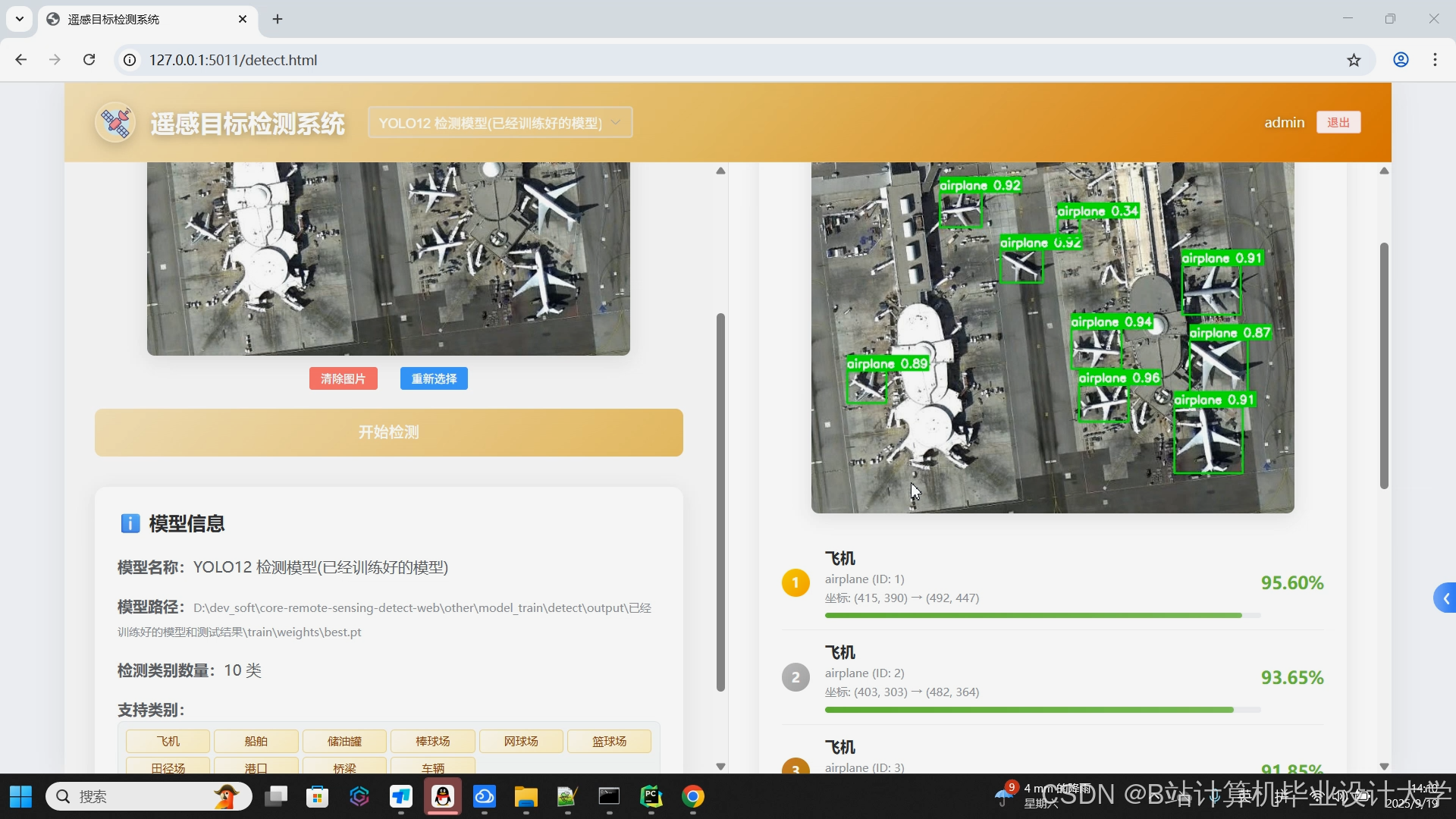
- 精度指标:YOLOv11-X模型在飞机检测任务中mAP@0.5:0.95达68.4%,较Faster R-CNN提升12.3个百分点。
- 速度指标:YOLOv11-N模型在RTX 4090上实现132FPS的推理速度,满足实时监测需求。
- 鲁棒性:在添加高斯噪声(σ=0.05)的干扰影像中,YOLOv11系列模型平均精度下降幅度控制在8%以内,显著优于SSD系列模型。
挑战与未来方向
1. 现存技术瓶颈
- 小目标检测:在0.1米分辨率影像中,面积小于32×32像素的目标检测mAP仍低于60%,需进一步优化特征金字塔网络。
- 数据稀缺问题:特定领域(如极地冰盖)标注数据获取成本高,联邦学习框架的引入可实现跨机构数据协同训练。
- 模型轻量化:边缘设备部署需求推动模型压缩技术研究,YOLOv11-Tiny通过知识蒸馏实现参数量缩减82%,但精度损失达5.3%。
2. 前沿发展方向
- 多任务学习框架:集成目标检测与语义分割任务,在Cityscapes遥感数据集上实现单模型双任务处理,推理时间仅增加15%。
- 时序融合模型:结合LSTM与Transformer结构,在PlanetScope时序影像中实现作物生长周期智能识别,准确率达92.1%。
- 物理约束建模:将大气散射模型融入损失函数,在雾霾天气影像检测中提升目标可见度,实验显示检测距离扩展37%。
结论
YOLO系列算法通过持续的技术迭代,已成为遥感影像智能分析的核心引擎。从早期架构优化到当前的多模态融合,其发展轨迹体现了深度学习与领域知识深度结合的趋势。未来,随着神经符号系统、量子计算等新技术的引入,YOLO基遥感分析系统将在检测精度、推理效率及可解释性方面实现质的飞跃,为全球环境监测与可持续发展提供更强有力的技术支撑。
参考文献
- YOLO框架最新综述从YOLOV1-YOLOV11(2024年10月23)
- YOLOv1到YOLOv10综述(2406)论文速读
- 基于YOLOv11的遥感影像目标检测与识别
- AI助力遥感影像智能分析计算,基于高精度YOLOv8全系列参数【n/s/m/l/x】模型开发构建卫星遥感拍摄场景下地面建筑物智能化分割检测识别系统
- 佳文赏析 | YOLOv5-RF:一种基于改进深度学习损失函数的尾矿库遥感影像目标识别方法
运行截图
推荐项目
上万套Java、Python、大数据、机器学习、深度学习等高级选题(源码+lw+部署文档+讲解等)
项目案例










优势
1-项目均为博主学习开发自研,适合新手入门和学习使用
2-所有源码均一手开发,不是模版!不容易跟班里人重复!

🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目代码以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看👇🏻获取联系方式👇🏻



















 9638
9638

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











