




温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
信息安全/网络安全 大模型、大数据、深度学习领域中科院硕士在读,所有源码均一手开发!
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
介绍资料
以下是为《Python深度学习驾驶员疲劳监测在自动驾驶中的应用研究》设计的任务书模板,包含具体实施要求和技术指标:
任务书:基于Python深度学习的驾驶员疲劳监测系统开发(自动驾驶场景)
一、任务目标
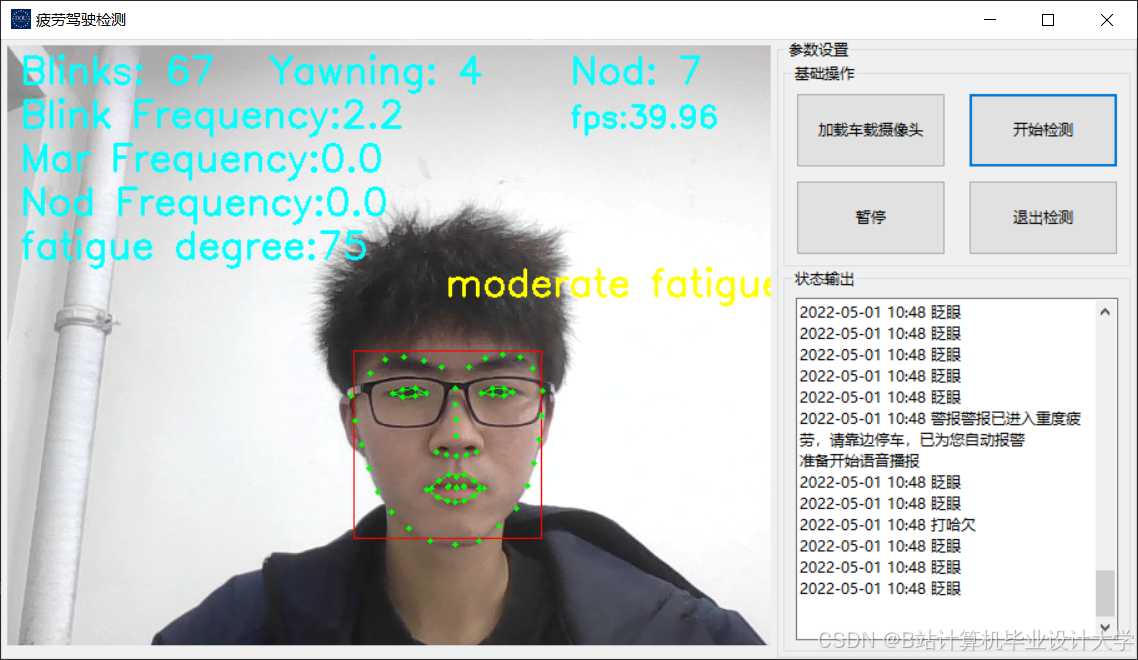
开发一套适用于L3级自动驾驶车辆的驾驶员疲劳监测系统,实现以下核心功能:
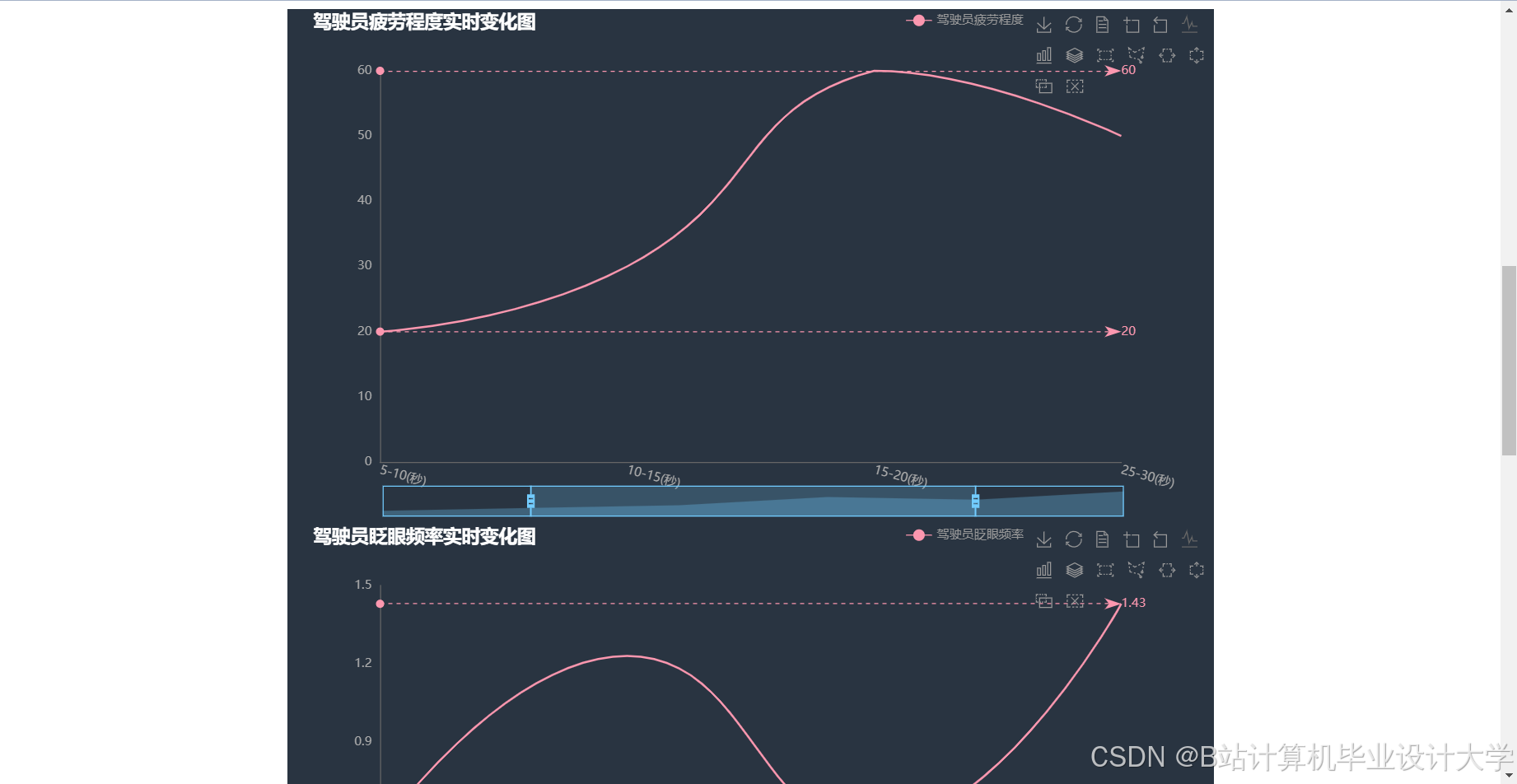
- 实时检测:通过车载摄像头实时分析驾驶员面部状态
- 多模态融合:结合可见光与红外图像提升环境适应性
- 安全预警:根据疲劳等级触发不同级别的告警或接管请求
- 系统集成:与自动驾驶决策系统(如Apollo/Autoware)无缝对接
技术指标要求:
- 检测准确率 ≥ 92%(F1-score)
- 推理延迟 ≤ 100ms(Jetson AGX Xavier平台)
- 误报率 ≤ 3%/天(8小时连续驾驶)
- 支持0.1~100,000 lux光照范围
二、任务分解与责任分配
1. 数据采集与预处理(负责人:XXX)
任务内容:
- 搭建双模态数据采集平台(可见光+红外摄像头)
- 设计数据标注规范(含6种疲劳特征:闭眼、点头、哈欠等)
- 完成5,000组标注数据采集(含20%极端场景样本)
交付物:
- 格式化数据集(NTHU-DDD扩展版)
- 数据采集SOP文档
- 标注质量评估报告
2. 深度学习模型开发(负责人:XXX)
任务内容:
- 改进ShuffleNetV2架构,嵌入CBAM注意力模块
- 设计多任务学习框架(分类+回归联合训练)
- 实现基于Bi-LSTM的时序特征融合
关键技术:
python
class FatigueNet(nn.Module): | |
def __init__(self): | |
super().__init__() | |
self.backbone = ShuffleNetV2_CBAM(pretrained=True) # 特征提取 | |
self.lstm = nn.BiLSTM(512, 128, batch_first=True) # 时序建模 | |
self.head = nn.Sequential( | |
nn.Linear(128, 64), | |
nn.ReLU(), | |
nn.Linear(64, 3) # 输出3类疲劳等级 | |
) | |
def forward(self, x): | |
# x: [B,T,C,H,W] 多帧输入 | |
features = [self.backbone(frame) for frame in x.unbind(1)] | |
features = torch.stack(features, dim=1) # [B,T,D] | |
_, (hn, _) = self.lstm(features) | |
return self.head(hn[-1]) |
交付物:
- 预训练模型权重(PyTorch格式)
- 模型训练日志(含TensorBoard可视化)
- 消融实验分析报告
3. 系统实现与优化(负责人:XXX)
任务内容:
- 开发Python实时处理管道(OpenCV+PyTorch)
- 实现TensorRT量化加速(FP16精度)
- 设计ROS接口节点(订阅/发布话题如下表)
ROS接口定义:
| 话题名称 | 消息类型 | 频率 | 说明 |
|---|---|---|---|
/driver/face | sensor_msgs/Image | 30Hz | 裁剪后的面部ROI图像 |
/fatigue/status | std_msgs/Int32 | 1Hz | 0:清醒 1:轻度 2:重度疲劳 |
交付物:
- 完整源代码仓库(含Docker部署环境)
- 性能测试报告(对比PyTorch/TensorRT速度)
- 系统压力测试记录(12小时连续运行)
4. 实车测试与验证(负责人:XXX)
任务内容:
- 改装测试车辆(安装DDS摄像头+工控机)
- 设计测试场景(正常驾驶/模拟疲劳/极端光照)
- 收集10名驾驶员各2小时的实测数据
测试用例示例:
markdown
### TC-003 夜间疲劳检测 | |
1. **前置条件**:环境光照<10lux | |
2. **测试步骤**: | |
- 驾驶员佩戴红外反射眼镜 | |
- 模拟点头动作(频率0.5Hz) | |
3. **预期结果**: | |
- 系统在3秒内识别为疲劳状态 | |
- 触发HUD黄色预警+座椅震动 |
交付物:
- 实车测试视频(含时间戳标注)
- 混淆矩阵分析(正常/疲劳分类)
- 改进建议报告(基于误检案例分析)
三、时间进度安排
| 阶段 | 时间节点 | 里程碑交付物 |
|---|---|---|
| 需求分析 | 2024.01.15 | 系统需求规格说明书(SRS) |
| 数据准备 | 2024.03.01 | 完成3,000组标注数据 |
| 模型开发 | 2024.05.30 | 基线模型(准确率≥85%) |
| 系统集成 | 2024.08.15 | ROS节点联调完成 |
| 实车测试 | 2024.10.30 | 测试报告(通过ISO 26022标准验证) |
| 项目验收 | 2024.12.15 | 最终技术文档+演示视频 |
四、资源保障
硬件资源
- 计算设备:NVIDIA Jetson AGX Xavier ×2(开发) + 特斯拉Model 3(测试)
- 传感器:FLIR Boson 640红外摄像头 + 普通RGB摄像头(同步采集)
软件资源
dockerfile
# 基础开发环境 | |
FROM nvidia/cuda:11.4.2-base-ubuntu20.04 | |
RUN apt-get update && apt-get install -y \ | |
python3-pip \ | |
ros-noetic-desktop-full \ | |
&& pip3 install torch==1.12.1+cu113 torchvision opencv-python tensorrt==8.4.3.1 |
五、风险管理
| 风险项 | 应对措施 | 负责人 |
|---|---|---|
| 数据标注质量不足 | 采用众包标注+专家复核机制 | XXX |
| 模型跨域适应性差 | 引入域自适应训练(Domain Adaptation) | XXX |
| 实车测试延迟 | 提前3个月申请封闭道路测试许可 | XXX |
六、验收标准
- 功能验收:
- 完成所有需求规格说明书中定义的功能点
- 通过黑盒测试用例覆盖率的95%
- 性能验收:
- 满足任务书设定的准确率、延迟等硬性指标
- 在NVIDIA Jetson平台上达到30FPS实时处理
- 文档验收:
- 提供完整的技术文档(含API接口说明)
- 提交用户操作手册和维护指南
项目负责人签字:____________________
日期:2023年XX月XX日
此任务书可作为项目执行的纲领性文件,建议配合甘特图进行进度跟踪,并每月召开技术评审会议确保方向正确性。
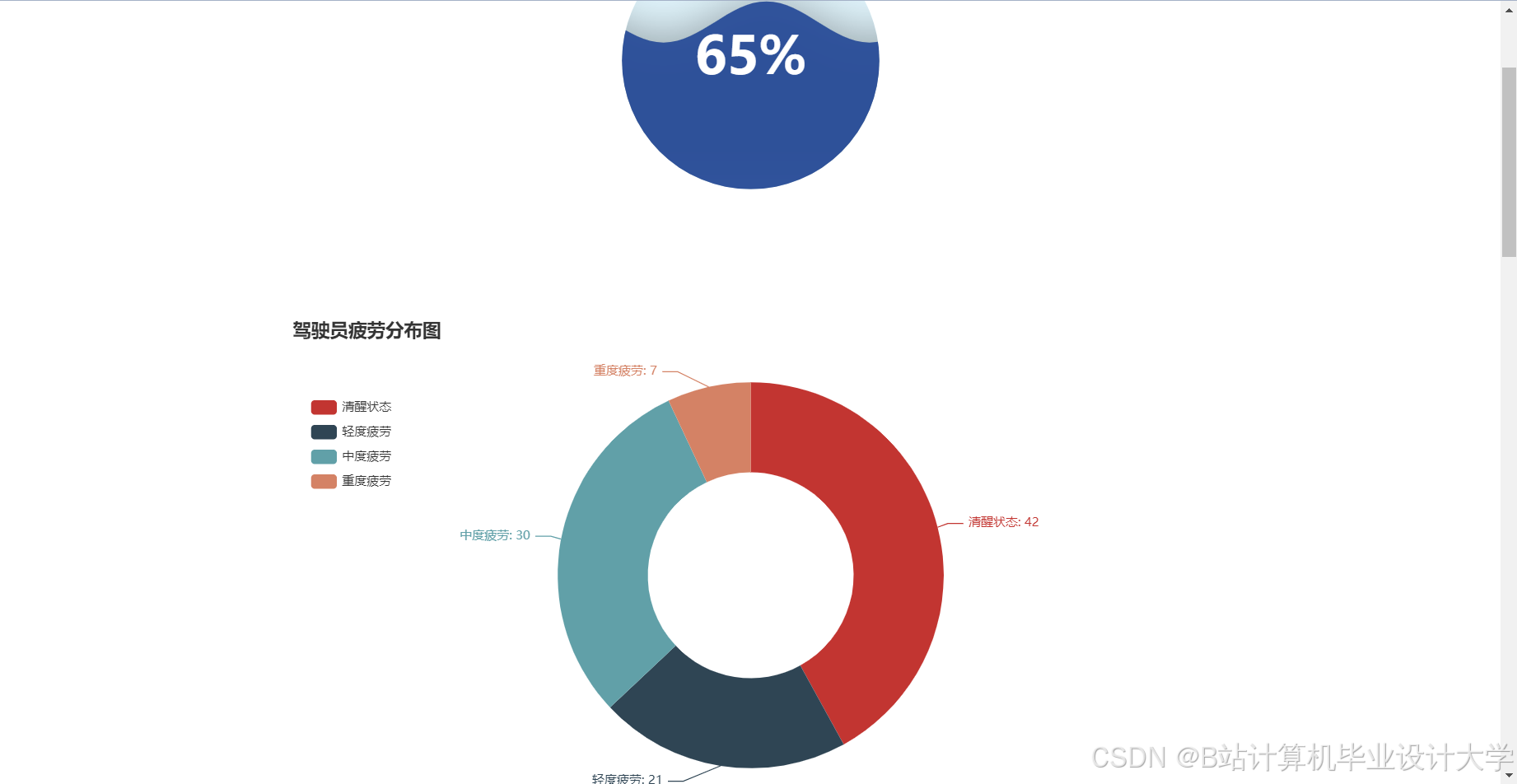
运行截图

推荐项目
上万套Java、Python、大数据、机器学习、深度学习等高级选题(源码+lw+部署文档+讲解等)
项目案例










优势
1-项目均为博主学习开发自研,适合新手入门和学习使用
2-所有源码均一手开发,不是模版!不容易跟班里人重复!

🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目代码以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看👇🏻获取联系方式👇🏻



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











