



作者:阿秀
InterviewGuide大厂面试真题网站:https://top.interviewguide.cn
这是阿秀的第「305」篇原创
小伙伴们大家好,我是阿秀。
目前已经是九月下旬了,秋招已经进入中后期了,很多公司已经开启秋招有一段时间了,相应的很多小伙伴都拿到了一些offer,所以最近一段时间也是收到不少学习圈中学弟学妹的offer咨询问题。
不过昨天就遇到一个让我有点感觉离谱的,分享一下。
1、学弟的咨询
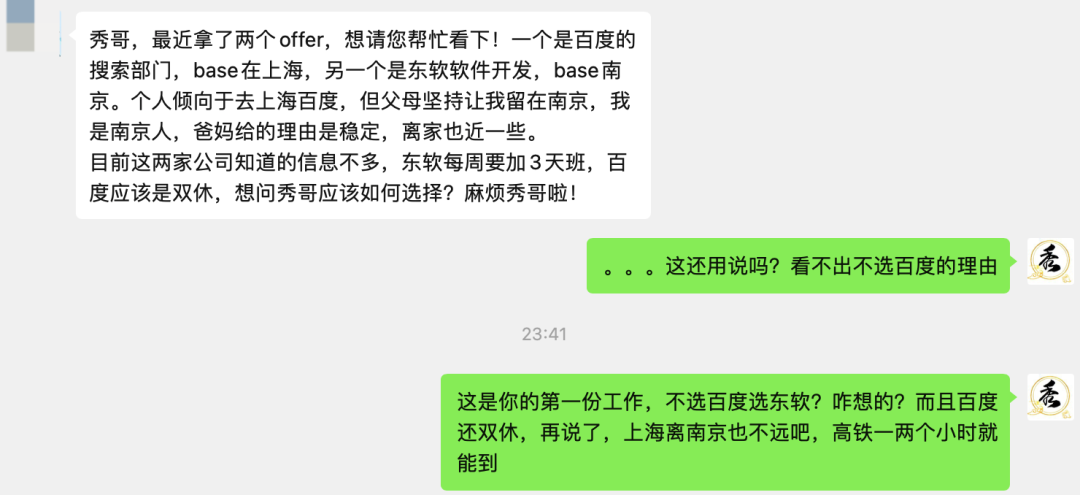
秀哥,最近拿了两个offer,想请您帮忙看下!一个是百度的搜索部门,base在上海,另一个是东软软件开发,base南京。
个人倾向于去上海百度,但父母坚持让我留在南京,我是南京人,爸妈给的理由是稳定,离家也近一些。
目前这两家公司知道的信息不多,东软每周要加3天班,百度应该是双休,想问秀哥应该如何选择?麻烦秀哥啦!
2、阿秀的回答
。。。这还用说吗?看不出不选百度的理由。
叔叔阿姨让你选东软的原因可能是想让你离他们近一些,能多陪陪他们,除此之外我想不到选择东软的原因了。
当然了,如果你家庭条件不错,爸妈就希望你留在身边,不需要你挣钱养家,一毕业就能给你安排的明明白白的话,你自己也愿意当全职子女的话,可以随意,想去哪个都可以。
下面我给你分析分析这两家公司。
1、体量前景
从前景来看,一个是一线大厂,虽然百度近几年有点落寞,但一线大厂守门员的角色还不是东软能够碰瓷的。
再说了,你在上海百度干两年跳出去可以选择的公司可远比东软干两年再出去能选择的多多了,你在上海百度干两年可以换的公司也是一二线公司,即使你要回南京,也至少能去南京华为这些,但你在南京东软呆两年再出来能选择的公司可少多了,这完全比不了。
2、薪资待遇
这是你的第一份工作,两家公司从待遇上就没得比,而且百度还双休,东软还要加班。
再说了,上海离南京也不远吧,高铁一两个小时就能到,这完全比不了。
3、说点别的
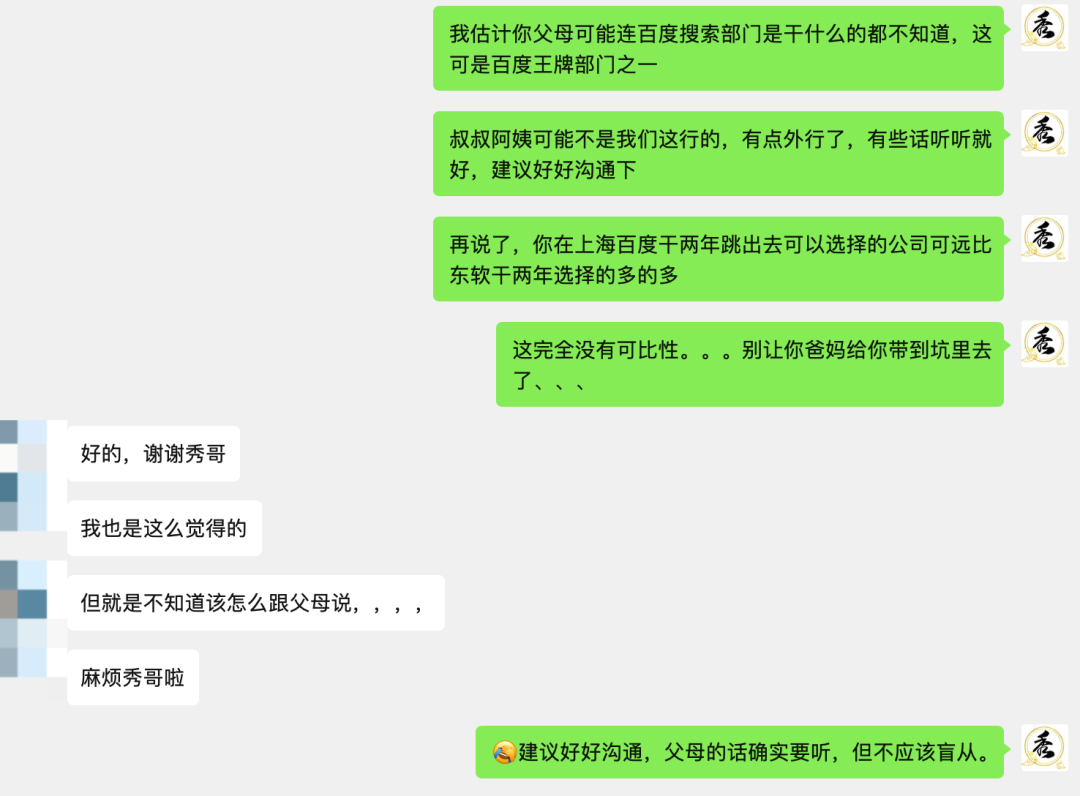
最后过来人说一句,爸妈的话是要听,当个听话的孩子也是应该的,但不应该盲目听从父母的话,你要有自己的主见,而不是不假思索得直接盲从。
我估计你父母可能连百度搜索部门是干什么的都不知道,叔叔阿姨可能不是互联网从业人员,有点外行强行指导那味儿了,所以有些话听听就好。
百度搜索部门是王牌部门之一,这两家公司完全没有可比性,别让你爸妈把你带到坑里去了,建议好好沟通下。
end
阿秀坚持做学习圈这件事情已经 2 年时间了,前年和去年分享的很多校招上岸经验也都是出自阿秀的学习圈中的往届上岸人,阿秀的学习圈中置顶帖的「知识图谱」和「精华区」(如下图)中有很多计算机大学本科&研究生学习以及校招的内容和问题:
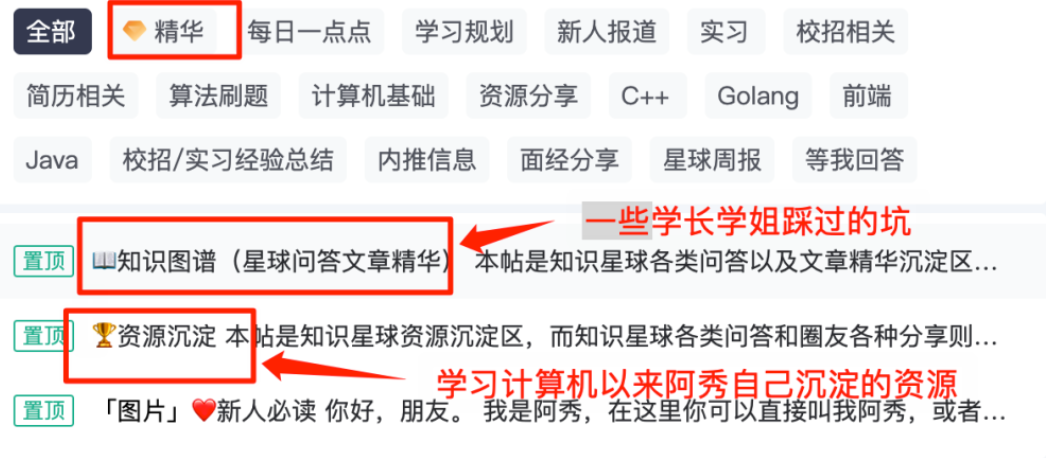 星球里的精华区、知识图谱以及资源沉淀
星球里的精华区、知识图谱以及资源沉淀
多看看这些能够帮你走的更稳、更顺、更平坦,比如:
后续也会在自己组建的阿秀的学习圈中分享一些社招跳槽找工作的经验,都是自己一路走过来的经验。
一个人踽踽独行不如结伴而行,以后会继续在星球笔耕不辍,输出一些有价值的内容 ,这可能是你求职路上性价比最高的一次点击!
,这可能是你求职路上性价比最高的一次点击!
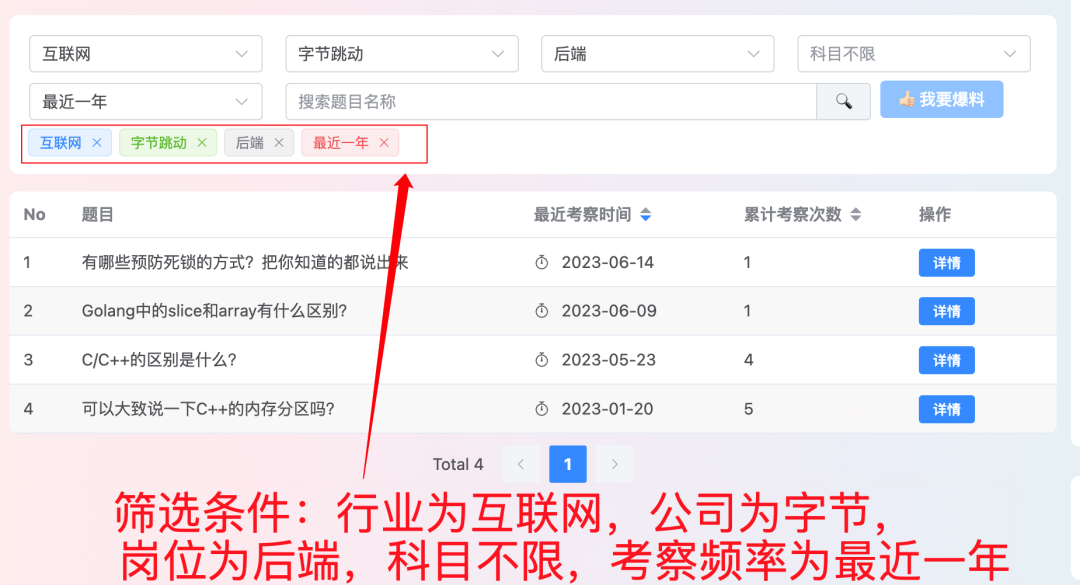
前段时间自己也开发了一个互联网大厂真题面试解析网站,比如我想查一下行业为互联网,公司为字节跳动,考察岗位为后端,考察时间为最近一年之类的面试题有哪些?
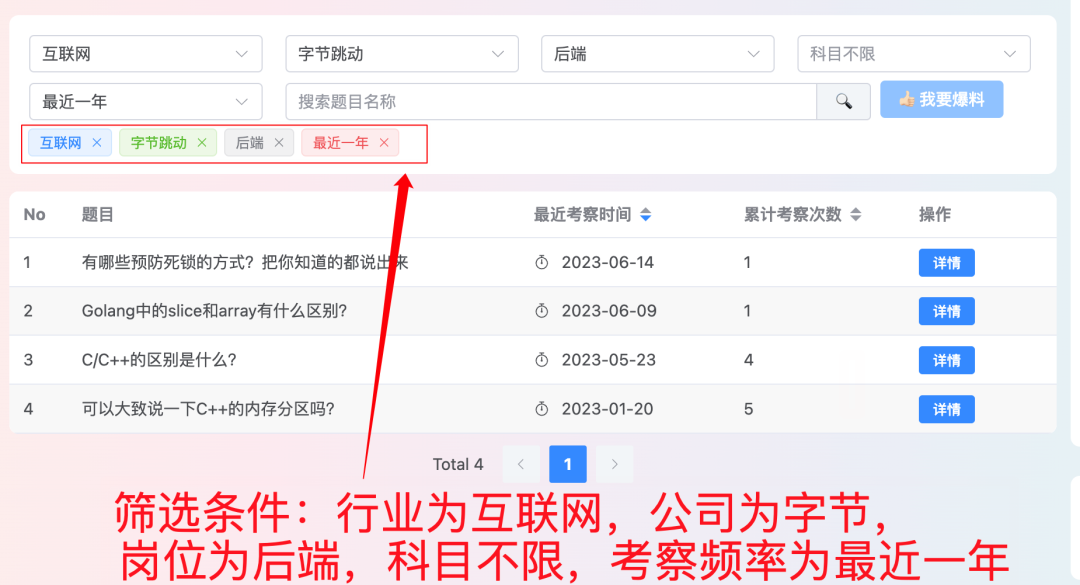
《InterviewGuide》大厂面试真题网站:https://top.interviewguide.cn/
已经有不少小伙伴遇到原题了,具体可以看下链接:
后面还会继续开发其余星球用户专属功能,比如模拟面试以及题目收藏、甚至是真题下载打印功能等。


















 601
601

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











