



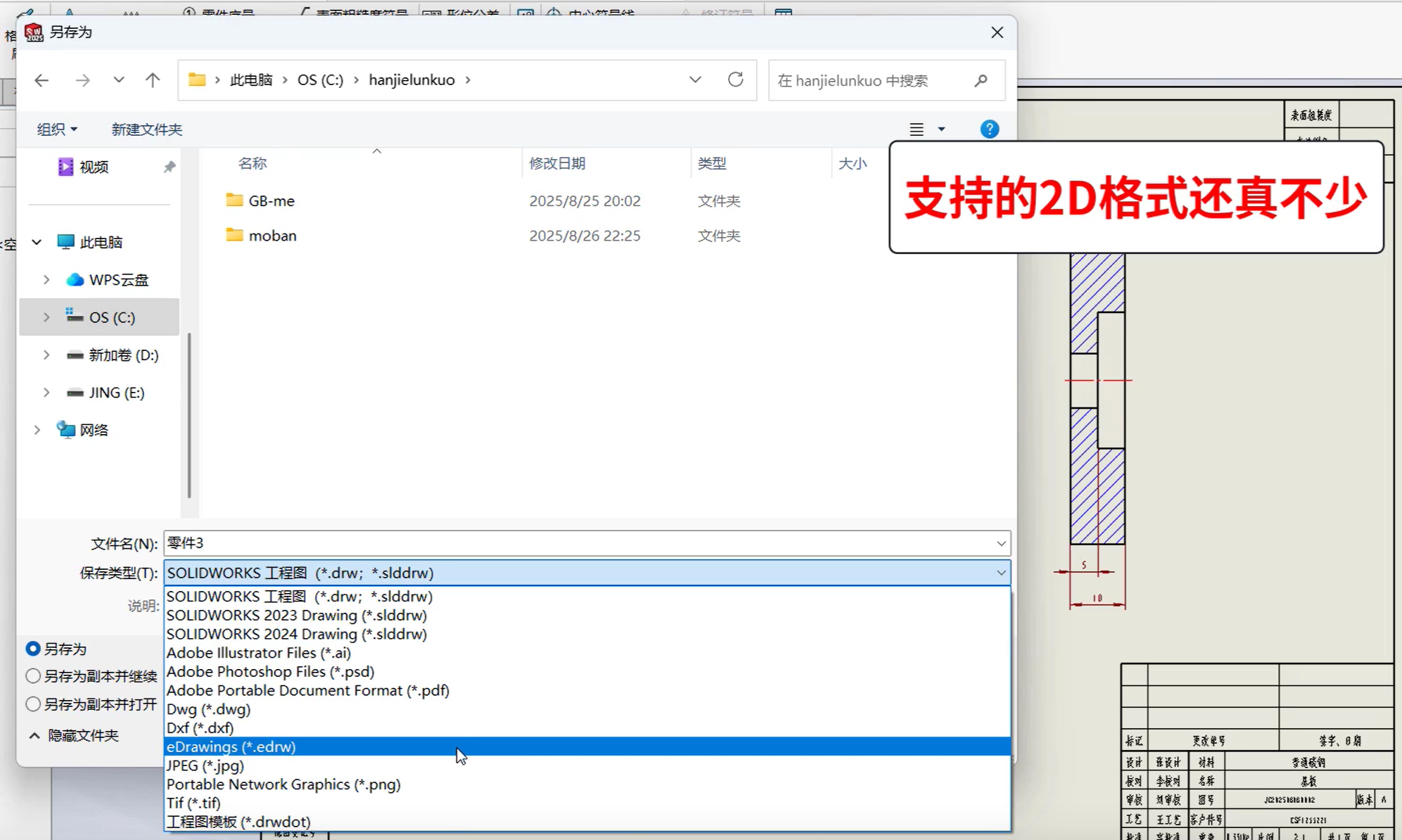
达索系统的SOLIDWORKS作为业内广泛使用的三维设计软件,其工程图功能与三维模型紧密关联,为设计工作带来了极大便利。然而,在实际工作场景中,我们常常需要将SOLIDWORKS工程图转换为其他2D格式,例如常见的DWG、PDF以及eDrawing等格式。通过合理配置转换参数,能够确保数据转换的准确性、高效性和专业性,最大程度减少因格式转换导致的信息丢失问题。
一:DWG格式转换的关键配置要点
在“DWG/DXF输出选项”中进行恰当配置,是提升DWG格式转换质量的关键,具体如下:
1、文件版本选择:建议选择与2D CAD软件相匹配的版本。不同版本的DWG文件在兼容性上存在差异,选择匹配版本可避免出现接收方因软件版本过低而无法打开高版本DWG文件的情况,保障文件的顺利流通与使用。
2、字体处理优化:优先选用TrueType字体。在SOLIDWORKS工程图转换为DWG格式过程中,字体兼容性问题可能导致乱码现象。而TrueType字体具有较好的通用性,使用该字体能够有效降低乱码风险,确保文本信息准确呈现。
3、比例输出设置:激活“1:1比例”选项。在SOLIDWORKS工程图中,可能存在多种比例设置。通过激活此选项,无论工程图中的比例如何,输出到2D CAD时线条长度都将与模型实际长度一致,保证图形的尺寸准确性。
4、图层映射配置:为实现从SOLIDWORKS到2D CAD的精准图层转换,需进行详细的图层映射配置。通过合理设置图层映射关系,能够确保工程图中的各个元素在转换后准确对应到2D CAD的相应图层,便于后续的编辑和管理。
二:PDF格式转换的关键配置要点
在将SOLIDWORKS工程图转换为PDF格式时,点击“选项”按钮后,重点关注字体嵌入设置。建议将字体定义嵌入文档,由于不同设备和系统对字体的支持存在差异,若不嵌入字体,可能导致PDF文件在不同设备上显示效果不一致。通过嵌入字体,可确保无论在何种设备上打开PDF文件,文本的显示效果都能保持一致,提升文件的专业性和可读性。
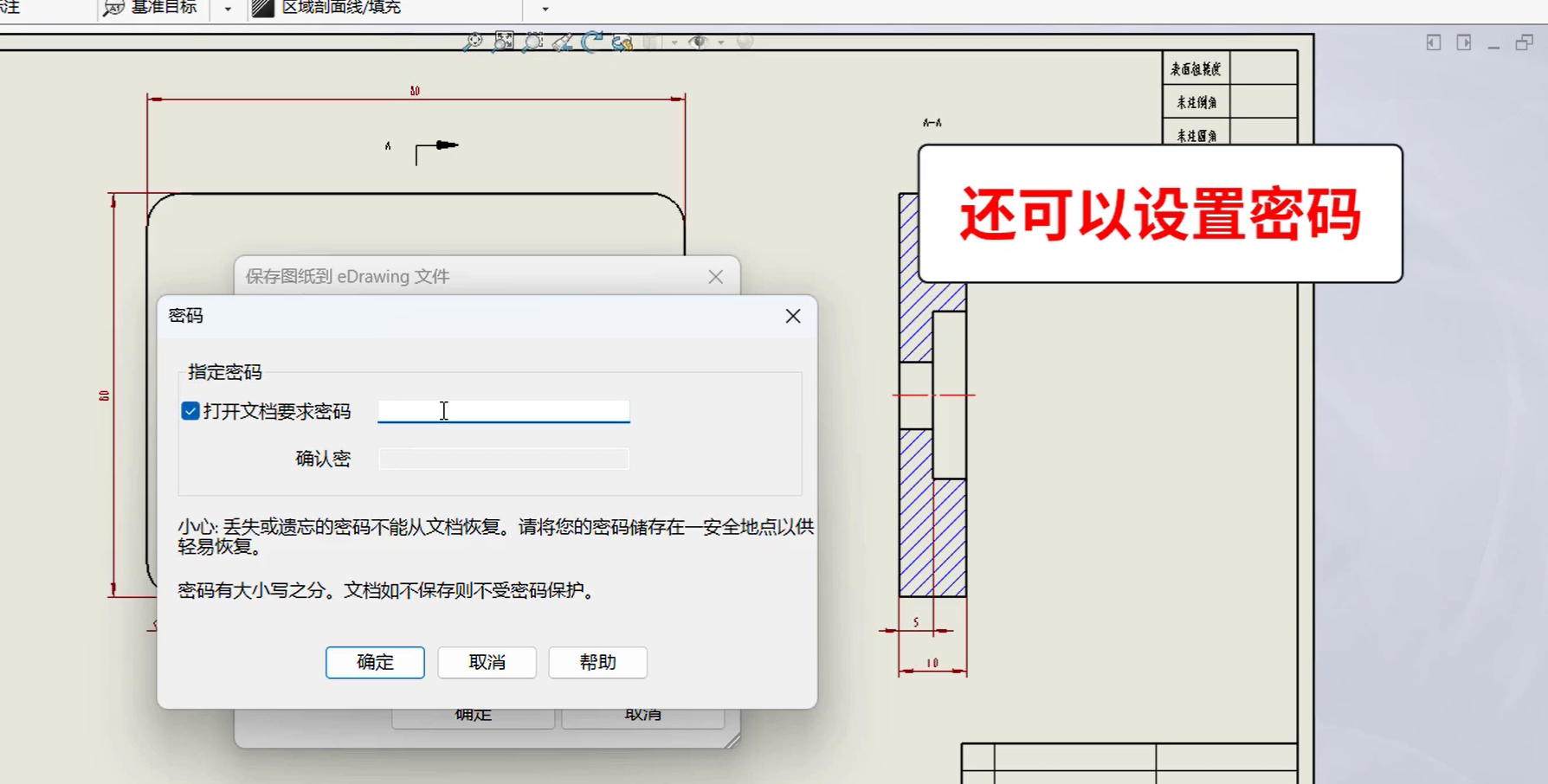
推荐使用eDrawing格式
eDrawing格式是SOLIDWORKS用户之间进行数据分享与协作的理想之选,为用户提供了极为便捷高效的数据交互方式。
1、文件体积优势:eDrawing文件大小明显小于原始SOLIDWORKS文件,这一特点使得文件的传输更加迅速便捷,尤其在网络传输或存储空间有限的情况下,优势更为突出。
2、查看工具便捷:接收方只需使用免费的eDrawings Viewer即可轻松查看文件内容,并进行测量等操作。无需安装复杂的SOLIDWORKS软件,降低了使用门槛,方便团队成员之间的文件共享与交流。
3、功能丰富实用:eDrawing文件支持多种视图和标注功能,用户能够在文件中添加注释、尺寸标注以及使用测量工具等。这些功能为团队成员之间的沟通与讨论提供了有力支持,有助于提高工作效率和协作质量。
通过掌握上述SOLIDWORKS工程图转换至其他2D格式的技巧,能够更好地满足实际工作中的多样化需求,提升工作效率和数据质量。

















 4666
4666

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









