



作为一款备受工程师青睐的设计工具,SOLIDWORKS正版软件的钣金模块始终走在行业前沿。在即将到来的 SOLIDWORKS 2025 版本中,钣金设计功能得到了进一步优化与扩展,为用户提供了更加高效、灵活的设计体验。以下是该版本中新增及改进的主要功能亮点:
1. 引入“折弯定位槽”特性
新版本增加了“折弯定位槽”功能,这一创新设计能够精准标识折弯机的放置位置。通过该功能生成的特征,可以显著提升生产过程中工人对齐折弯与工具的效率和准确性。
2. 实现多段长度边线法兰创建
在边线法兰的创建方面,SOLIDWORKS 2025 实现了突破性进展。现在,用户可以通过单一命令轻松创建具有不同长度的边线法兰,大幅简化了复杂钣金件的设计流程。
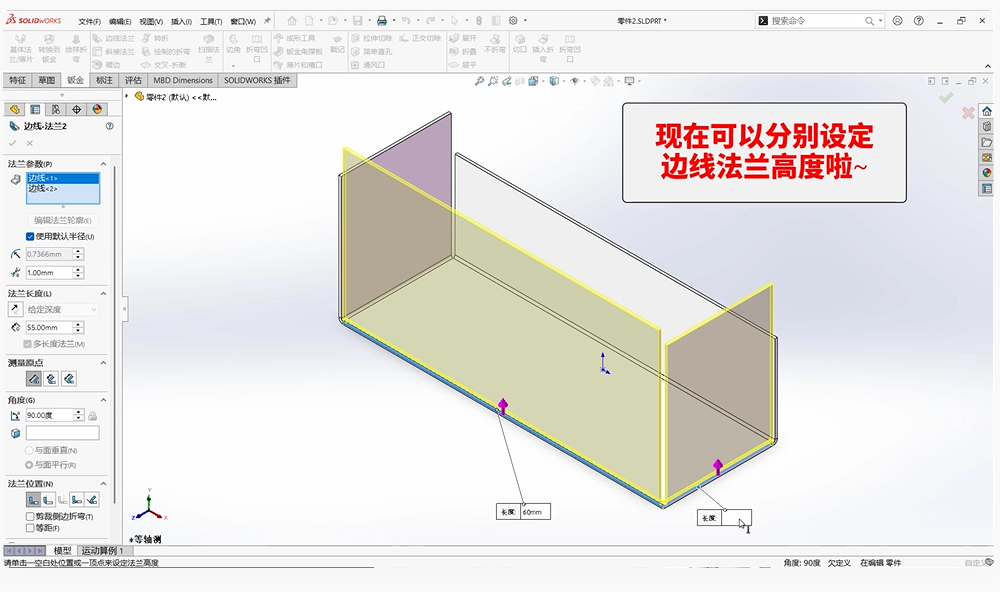
3. 自动添加并驱动法兰长度尺寸
新版软件具备自动为所有边线法兰轮廓添加长度尺寸的功能,并且这些尺寸可以直接用于驱动边线法兰的变化。这一特性不仅减少了手动标注的工作量,还增强了设计的精确性和一致性。
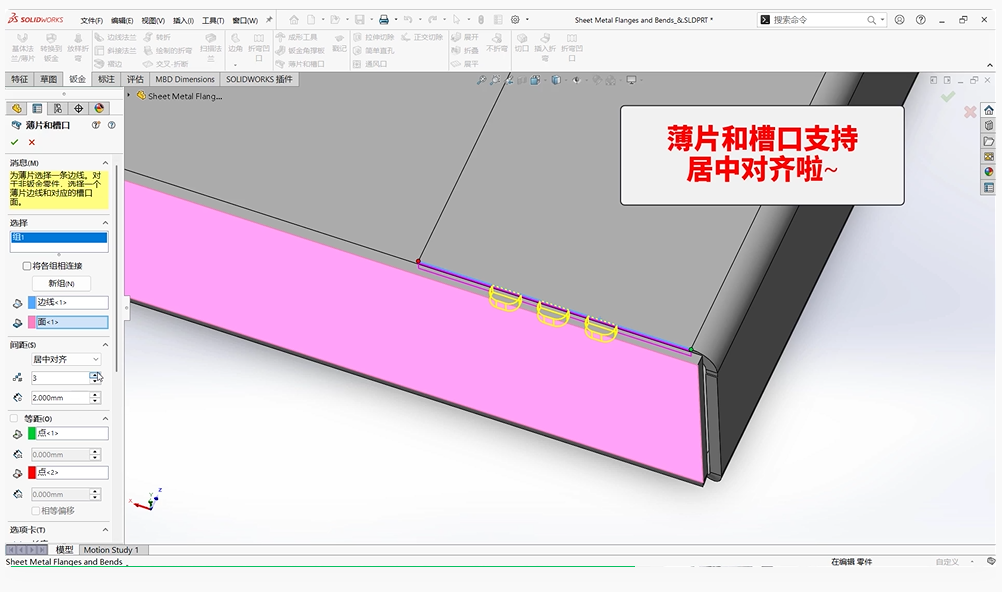
4. 薄片与槽口功能全面升级
SOLIDWORKS 2025 对薄片和槽口的创建流程进行了深度优化,使其操作更为简便,功能更加灵活。更新后的功能支持创建居中对齐的薄片、按等增量偏移的薄片、指定方向的薄片,以及选择跳过特定实例的薄片和槽口。这些改进极大地丰富了设计师在处理复杂钣金结构时的选择空间。

















 1117
1117

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









