




当模型错误的时候
在上一节的迷宫示例中,模型从空开始,仅填充完全正确的信息,同时模型的变化是相对有限的。然而在一般情况下,模型可能不正确,原因包括在随机环境中仅观察到有限样本;模型由泛化能力较差的函数近似;环境发生变化,而新的动态尚未被观测。当模型错误时,规划过程可能计算出次优策略。
乐观模型有助于快速发现错误
若模型乐观(即预测比实际更高的收益或更优的状态转移),规划会驱使智能体尝试这些虚假机会。智能体很快会发现这些机会不存在,从而感知并修正模型错误。
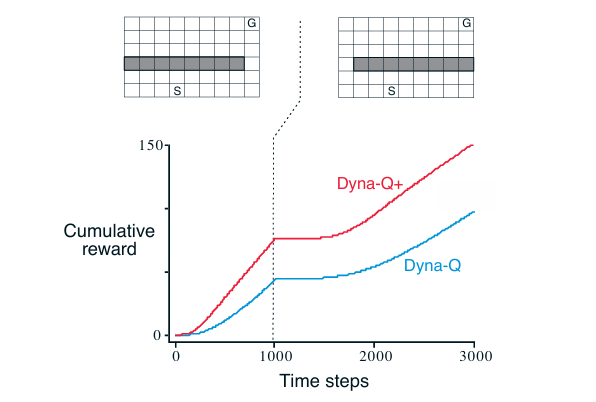
屏障迷宫案例
初始环境下最短路径从屏障右侧绕行。 1000 步后环境发生变化,原路径被封锁,新最短路径从左侧绕行。
[!NOTE]
横轴智能体与环境交互的总步数(真实交互步数)。
纵轴累计回报(注意:此处是“累计”,不是“平均”)。
假设每成功到达目标(G)获得 +1 奖励;其他步骤奖励为 0;一幕从起点 S 开始,到 G 结束。
那么累计回报 = 成功次数 × 1(因为每次成功得 +1);累计回报的增长速率 = 单位时间内成功的次数。
**初期(0–300 步)**策略随机 → 很少成功 → 累计回报增长缓慢(曲线平缓);**中期(300–800 步)**通过规划和学习 → 找到较优路径 → 成功频率上升 → 累计回报加速增长(曲线变陡);后期(800–1000 步)策略基本收敛 → 成功频率稳定 → 累计回报以恒定斜率线性增长(即“直线增长”)。因此,“直线增长”表示:智能体已学会最优策略,每幕耗时稳定,单位时间成功次数恒定 → 累计回报随时间线性增加。累计回报进入稳定线性增长阶段,意味着策略已优化至最优水平。
第 1000 步后曲线变平主要是因为环境突变,原最短路径被封锁 → 旧策略失效;智能体仍按旧模型规划 → 尝试走已被堵死的路径 → 无法到达目标;因此不再获得 +1 奖励 → 累计回报停止增长 → 曲线变平。此时累计回报并未下降,只是增长停滞,说明性能暂时退化。
后期Dyna-Q依赖真实交互逐步发现新路径 → 最终恢复增长,但较慢;**Dyna-Q+**因引入“探索奖励”(对长期未尝试的状态-动作给予额外收益)→ 主动试探右侧新路径 → 更快发现新最优路径 → 累计回报更快恢复线性增长。
Dyna-Q+ 在 Dyna-Q 基础上引入额外试探收益,鼓励探索。Dyna-Q 与 Dyna-Q+ 均在前 1000 步内找到最优路径。环境变化后,两者性能暂时下降(曲线变平,智能体在屏障后徘徊,没有得到收益);但随后均能学习新最优策略。
悲观或静态模型难以发现环境改善
当环境变得更好(如出现新捷径),但原有策略未反映此改善时,智能体可能长期无法发现变化,因为其模型未更新,规划持续依赖错误信息。
捷径迷宫案例
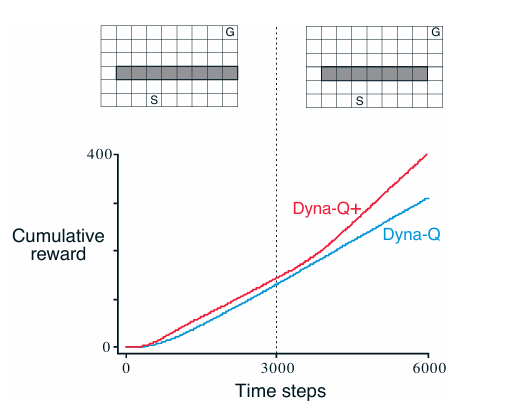
此时初始环境最优路径绕屏障左侧。 3000 步后右侧开启更短路径,原路径仍可用。但是Dyna-Q 从未发现新捷径,其模型认为右侧无通路,规划越频繁,越不会尝试右侧动作。即使使用 ε\varepsilonε-greedy 策略,试探概率也难以积累足够探索以发现捷径。
试探与开发的矛盾
试探意味着执行动作以改进模型(发现环境变化); 开发则意味着基于当前模型执行最优动作。我们的目标是在不显著降低平均性能的前提下,有效发现环境变化。 虽无完美解法,但简单启发式方法常有效。
Dyna-Q+ 的启发式试探机制
Dyna-Q+ 引入计算上的好奇心,对每个状态-动作对 (s,a)(s, a)(s,a),记录自上次真实交互以来经过的时间 τ(s,a)\tau(s, a)τ(s,a)。若某转移在 τ\tauτ 步内未被尝试,则在模拟经验中为其赋予额外收益:
rmodified=r+κτ
r_{\text{modified}} = r + \kappa \sqrt{\tau}
rmodified=r+κτ
其中 κ>0\kappa > 0κ>0 为小常数。该机制鼓励智能体周期性试探长期未访问的状态转移,即使需执行一长串动作。虽有试探成本,但在如捷径迷宫等场景中,收益远大于代价。
练习
为何 Dyna-Q+ 在“屏障迷宫”和“捷径迷宫”的两个阶段均优于 Dyna-Q?
Dyna-Q+ 在“屏障迷宫”(环境变差:原路径被封锁)和“捷径迷宫”(环境变好:新捷径出现)两个场景中均优于 Dyna-Q,其根本原因在于 Dyna-Q+ 引入了基于时间的探索激励机制(即“计算好奇心”),使其能更主动、持续地探测长期未访问的状态-动作对,从而更快适应环境的非平稳变化。
在“屏障迷宫”中(环境恶化)第 1000 步后,原最优路径被封锁,智能体若继续依赖旧模型,将反复尝试无效动作,无法到达目标。Dyna-Q 的局限在于仅依靠 ε-greedy 进行随机探索,试探强度弱且无方向性;在高维或长路径任务中,偶然试探难以触发对新可行路径的完整发现。Dyna-Q+ 的优势在于对长期未执行的状态-动作对(如左侧绕行的动作序列)赋予额外奖励。即使这些动作在旧模型中被认为“无用”,其模拟规划也会因探索奖励而被优先考虑。因此,Dyna-Q+ 能主动重新探索被忽视的区域,更快发现左侧新路径,恢复性能。
在“捷径迷宫”中(环境改善)第 3000 步后右侧出现更短路径,但 Dyna-Q 的模型仍认为右侧不可达(因从未成功穿越),规划始终避开该区域。Dyna-Q 的困境在于模型未更新 → 规划结果持续强化旧策略。ε-greedy 的随机试探概率低,且单次试探不足以完成整条新路径,无法获得正反馈,导致探索无法积累。结果是陷入“模型盲区”,长期无法发现捷径。Dyna-Q+ 的优势在于右侧状态-动作对因长期未被真实执行,其 τ(s,a)\tau(s,a)τ(s,a) 持续增长,模拟中的探索奖励也随之增大。规划过程会主动构造包含这些高探索奖励动作的轨迹,驱使智能体在真实环境中尝试右侧路径。一旦成功穿越,立即获得 +1 奖励,模型迅速更新,策略快速切换至新最优路径。
Dyna-Q+ 的核心创新在于将探索动机内化到规划过程中不依赖外部随机性(如 ε-greedy)进行低效试探;而是通过时间驱动的内在奖励,系统性地“怀疑”长期未验证的模型假设;这使其既能应对环境恶化(需放弃旧策略),也能抓住环境改善(需发现新机会)。相比之下,Dyna-Q 的模型一旦收敛,就缺乏主动验证其有效性的机制,在动态环境中表现出模型固化。
捷径迷宫案例中,Dyna-Q+ 与 Dyna-Q 的性能差距在第一阶段为何略有收窄?
在第一阶段,环境是静态且已收敛的,最优策略已找到(例如绕左侧路径);所有状态-动作对中,只有最优路径上的动作能高效到达目标;其他动作(如尝试右侧)在真实环境中无效或低效。然而,Dyna-Q+ 仍会为长期未执行的动作(如右侧探索动作)赋予额外的探索奖励 。这导致规划过程中生成包含非最优动作的模拟轨迹;策略偶尔被“诱惑”去执行这些高探索奖励但实际无效的动作;真实交互中浪费步数尝试无用路径,降低单位时间的成功率;因此,累计回报的增长速率略低于纯开发导向的 Dyna-Q。Dyna-Q+ 为未来的环境变化“预付”了探索成本,牺牲了静态环境下的部分性能。

















 25
25

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









