




最近做项目及看别人源码过程中涉及到多线程的知识,感觉自己多线程方面还不够系统,所以需要系统的总结一下这方面的知识。先从如何停止一个线程开始:
这里先记下最关键的一点:
停止线程:应该代码逻辑上停止线程中的任务从而让线程自动停止,而不是强制停止线程自身
下面先问自己几个问题,由浅入深的学习线程知识:
1、是否了解线程的用法?
2、是否了解对线程的stop,suspend,resume方法?
3、线程的stop,suspend,resume方法中存在哪些问题?
4、既然stop不可用,如何设计可以随时被中断而取消的任务线程?
5、是否熟悉interrupt中断的用法?
6、使用boolean标志位的好处有哪些?
7、interrupt底层的细节是什么?
8、以上问题和线程安全有什么关系?
1、
2、是否了解对线程的stop,suspend,resume方法?
- stop方法(Deprecated),是暴力的直接终止线程,不管执行到什么状态,不管资源是否释放。但持有的锁是会立即释放掉的。
- suspend方法(Deprecated),是暂停线程,不释放锁。
- resume方法(Deprecated),与suspend相对应,恢复线程。
3、线程的stop,suspend,resume方法中存在哪些问题?
-
stop() 方法的弊端:
(1)、在结束一个线程时并不会保证线程的资源正常释放,会导致程序可能会出现一些不确定的状态。
(2)、对于多线程共享变量来说不安全,例如AB两线程都对同一变量var操作,A线程突然被stop了,var就处在不确定状态,B线程再操作var可能造成crash等。 -
suspend() 方法的弊端:
(1)、对于多线程用同一锁来说,如果持有锁的线程A被suspend,会导致等待锁的线程B可能一直处于等待状态。
4、既然stop,suspend 不可用,如何设计可以随时被中断而取消的任务线程?
线程是与任务强绑定的,线程的结束就是任务的结束。任务结束的时候让线程自动停止。所以应该代码逻辑上实现线程中任务的停止:
线程的执行模式应该是协作的任务执行模式。 满足以下几点:
- 通知目标线程自行停止,而不是强制停止。
- 目标线程应当具备处理中断的能力。
- 中断的方式:线程内置Interrupt 和 boolean标志位。
线程内置Interrupt() 的使用
下面举例如何使用Interrupt()方法:
InterruptableThread.java类:
public class MutileThread {
public static void main(String[] args) {
Thread thread = new InterruptableThread();
thread.start();
try {
Thread.sleep(2000);
} catch (InterruptedException e) {
e.printStackTrace();
}
thread.interrupt(); //中断通知,触发中断
}
//目标线程,sleep()可以接受到interrupt()的通知
public static class InterruptableThread extends Thread{
@Override
public void run() {
try {
sleep(5000);
} catch (InterruptedException e){
//可以在这里进行清理,关闭资源等
System.out.println("interrupted");
}
}
}
}
但是下面InterruptableThread1对于thread.interrupt()不起作用:因为没有对interrupt做支持,上面是sleep对interrupt有支持。
public static class InterruptableThread1 extends Thread{
@Override
public void run() {
for (int i = 0; i < 10000; i++) {
System.out.println(i);
}
}
}
如果想支持interrupt,怎么办呢?如下:
public static class InterruptableThread2 extends Thread{
@Override
public void run() {
for (int i = 0; i < 10000; i++) {
if(interrupted()){ //添加收到中断通知
break;
}
System.out.println(i);
}
}
}
interrupted() 和 isInterrupted()的区别:
- interrupted() : 静态方法,获取线程中断状态,调用后清空状态,后续调用都返回false,除非有新的中断进来。
- isInterrupted():非静态方法,获取线程中断状态,不清空,中断清空前一直返回true。
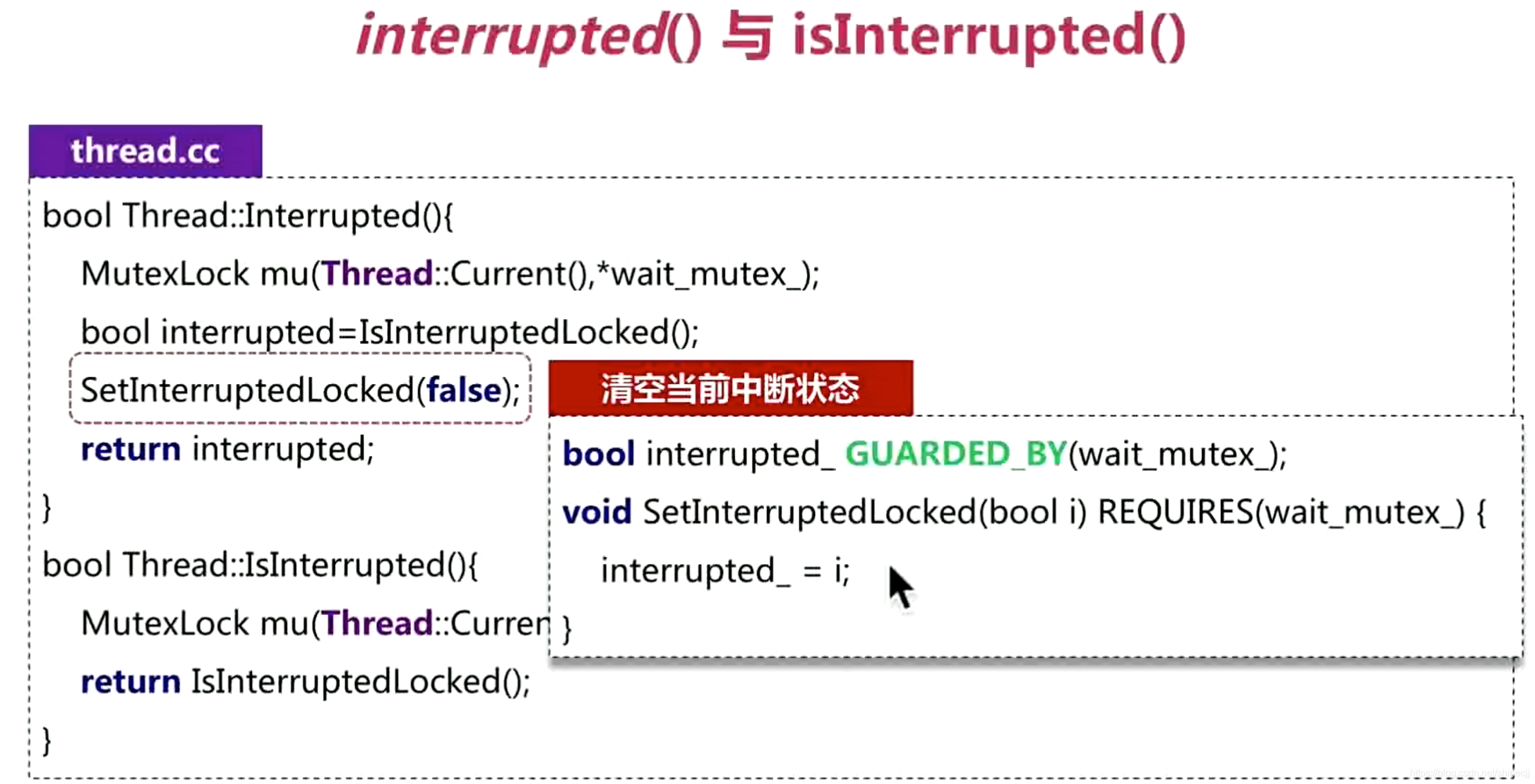
在底层C++部分,interrupted() 比 isInterrupted() 对了一句setInterruptedLocked(false); 是给变量interrupted_(加锁了)赋值。
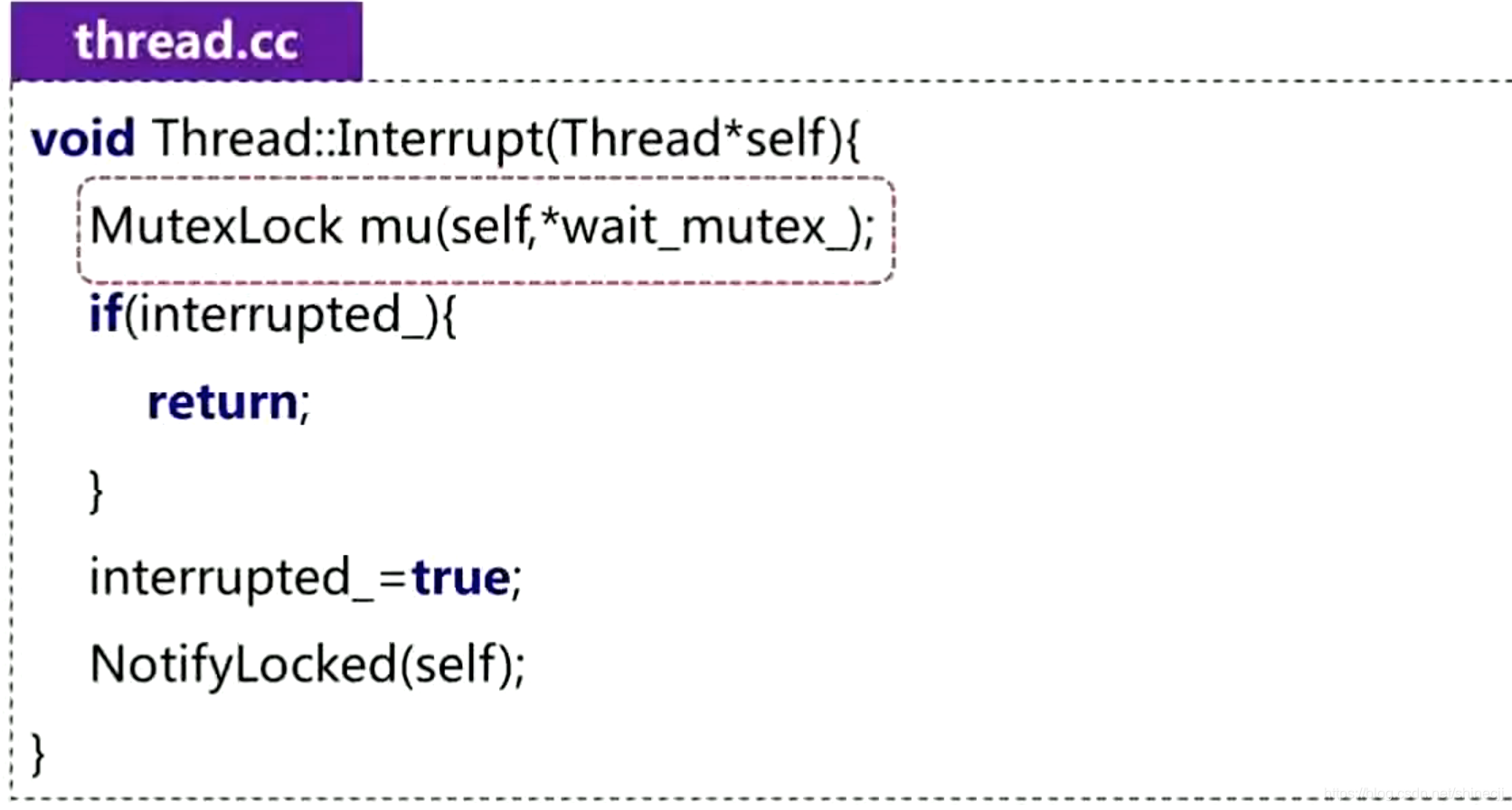
可以看interrupt方法底层实现,就是给标志位interrupted_(加锁了)赋值。(注意对比我们下面要使用的 boolean标志位 方法,是一样的)
boolean标志位
public class MutileThreadBoolean {
public static void main(String[] args) {
InterruptableThread thread = new InterruptableThread();
thread.start();
try {
Thread.sleep(2000);
} catch (InterruptedException e) {
e.printStackTrace();
}
thread.isStop = true;
}
public static class InterruptableThread extends Thread{
boolean isStop = false;
@Override
public void run() {
for(int i = 0; i < 10000; i++){
if(isStop){
break;
}
System.out.println(i);
}
}
}
}
上面就是使用boolean的方法,但是这是不安全的,因为isStop不是线程可见的,在主线程设置为true, 在目标线程里还不一定能看见,人家interrupt()方法的标志位interrupted_还加了锁呢。怎么办呢?很简单,如下:
volatile boolean isStop = false;
interrupt() 和 boolean标志位 怎么选择呢?
除非是使用了系统的方法如sleep()(对interrupt()支持),否则一般都使用
boolean标志位,因为前者是调用JNI,有一定的开销,所以后者性能上也会好些。

















 7971
7971

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









