



-
程序
程序是存放在磁盘文件中的可执行文件
-
进程
- 程序的执行实例被称为进程
- 进程具有独立的权限与职责。如果系统中某个进程崩溃,它不会影响到其余的进程(一个进程中的线程崩溃,会影响到这个进程中的其他线程)
- 每个进程运行在其各自的虚拟地址空间中,进程之间可以通过由内核控制的机制相互通讯
-
进程ID
每个Linux进程都一定有一个唯一中是一个数字标识符,称为进程ID,进程ID总是一个非负数。
task_struct ==结构体 ==进程表项(进程控制块)
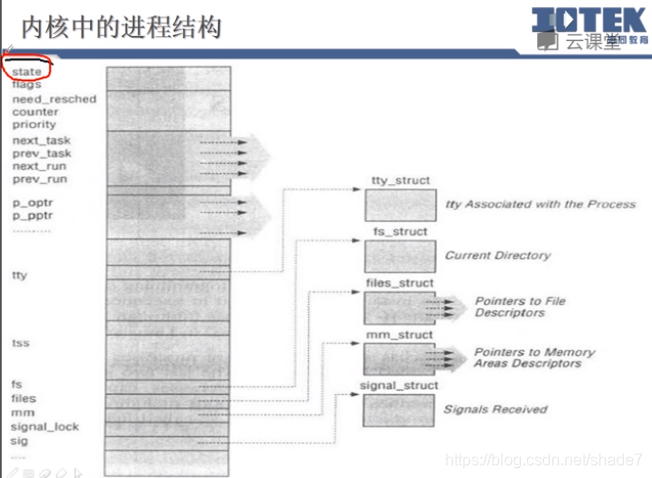
记录程序当前运行状态
PS:state——当前进程的状态(运行状态、就绪状态、僵尸状态)
priority——运行方式(调用状态)
files_struct——是一个结构体指针,指向文件描述符表
mm_struct——是一个结构体指针,关于物理内存和虚拟内存映射

















 2711
2711

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









