



一种基于ADPVD和HOG技术的彩色图像隐写方法
2.1 引言
近年来,由于通过社交网络和云服务进行的数据传输不断增加,信息安全已成为人类社会最重要的问题之一[1]。互联网的普遍使用导致大量数据在开放网络和不安全通道上传输,使私密和机密数据面临严重威胁。随着数字信息和数据通过互联网传输的频率较以往更高,保护和保障敏感信息的技术亟需被发现并持续开发[2,3]。
为了确保秘密数据的机密性并防止未授权用户获取传输的信息,人们通过三种机制引入了数据隐藏的概念:隐写术、密码学和水印技术。由于隐写术能够提供隐蔽通信,因此相比其他两种数据隐藏技术,它成为一种更为有效的技术[4,5]。实际上,针对数字图像的隐写方法已被广泛研究。各种技术被用于将秘密数据嵌入到载体对象中。除通信参与者外,其他任何人都无法检测出载体对象中的隐藏信息。隐写术已应用于多种场景,如材料的版权控制、智能身份证、电子水印、医学成像系统和安全通信。图像作为隐写术中最常用的载体对象 [6,7]。可通过利用载体图像的统计特征,在不改变其属性的前提下将秘密信息嵌入载体图像中。该嵌入过程可根据载体图像自适应地随机选择像素,或在局部标准差较大的块中选择像素。携带秘密比特的像素将根据载体图像的内容进行自适应选择[8]。
大多数现有的隐写术方法由于嵌入了隐藏的秘密消息而导致可检测的伪影,从而降低了隐写图像的质量[9,10]。第三方可以利用这些伪影作为存在秘密消息的迹象。像素值差分 (PVD)是图像隐写术中一种高效且强大的方法。然而,该方法只能对载体图像的所有像素采用单一的嵌入方向,从而导致嵌入的秘密数据容易被准确检测[11,12]。
在本章中,我们将文本视为一种需要隐藏在载体图像中的秘密数据位,即利用图像实现安全通信,并将机密数据隐匿于其中,使得未经授权的接收者无法察觉到任何机密信息的存在。本章提出了一种基于像素的自适应方向像素值差分(P‐ADPVD)方法,用于在载体图像的不同边缘方向上嵌入秘密消息。P‐ADPVD方法依赖于感兴趣像素(POI),将秘密数据位嵌入到每个像素的主导边缘方向中。采用方向梯度直方图(HOG)算法,通过计算载体图像的梯度幅值和角度信息,确定POI各个块的主导边缘方向,该方向可根据阈值进行判断。
2.2 自适应方向像素值差分(ADPVD)方法回顾
基于自适应方向像素值差分(ADPVD)的方法 [13]通过为每个颜色通道选择合适的嵌入方向,沿三个方向(水平、垂直和对角线)将秘密数据嵌入载体图像中。彩色图像隐写术比灰度图像更重要,因为它具有三个颜色分量,能够容纳更多的秘密信息。此外,在嵌入秘密数据后,使用彩色图像使得人眼很难预测和检测载体图像中是否存在秘密数据。红、绿、蓝分量的像素值均采用8位表示。根据各通道的最佳嵌入方向(水平、垂直和对角线),秘密数据的一部分被分别嵌入到三个通道(R,G,B)中的每一个。图2.1和2.2分别总结了基于自适应方向像素值差分(ADPVD)方法的嵌入和提取阶段的两个示例。该方法采用了自适应方向像素值差分(ADPVD)方法隐藏秘密数据的相同思路,而像素的选择则基于HOG算法,这将在本章后续部分进行讨论。
2.3 基于像素的自适应方向PVD隐写术
如图2.3所示,提出的P‐ADPVD方法由两个算法组成:一个用于嵌入秘密数据,另一个用于提取秘密数据。这两个算法均基于使用HOG算法选择一组感兴趣像素(POI),以从任意彩色载体图像中嵌入和提取秘密数据。下文将进一步详细说明计算HOG并寻找载体图像中POI的步骤。
2.3.1 方向梯度直方图
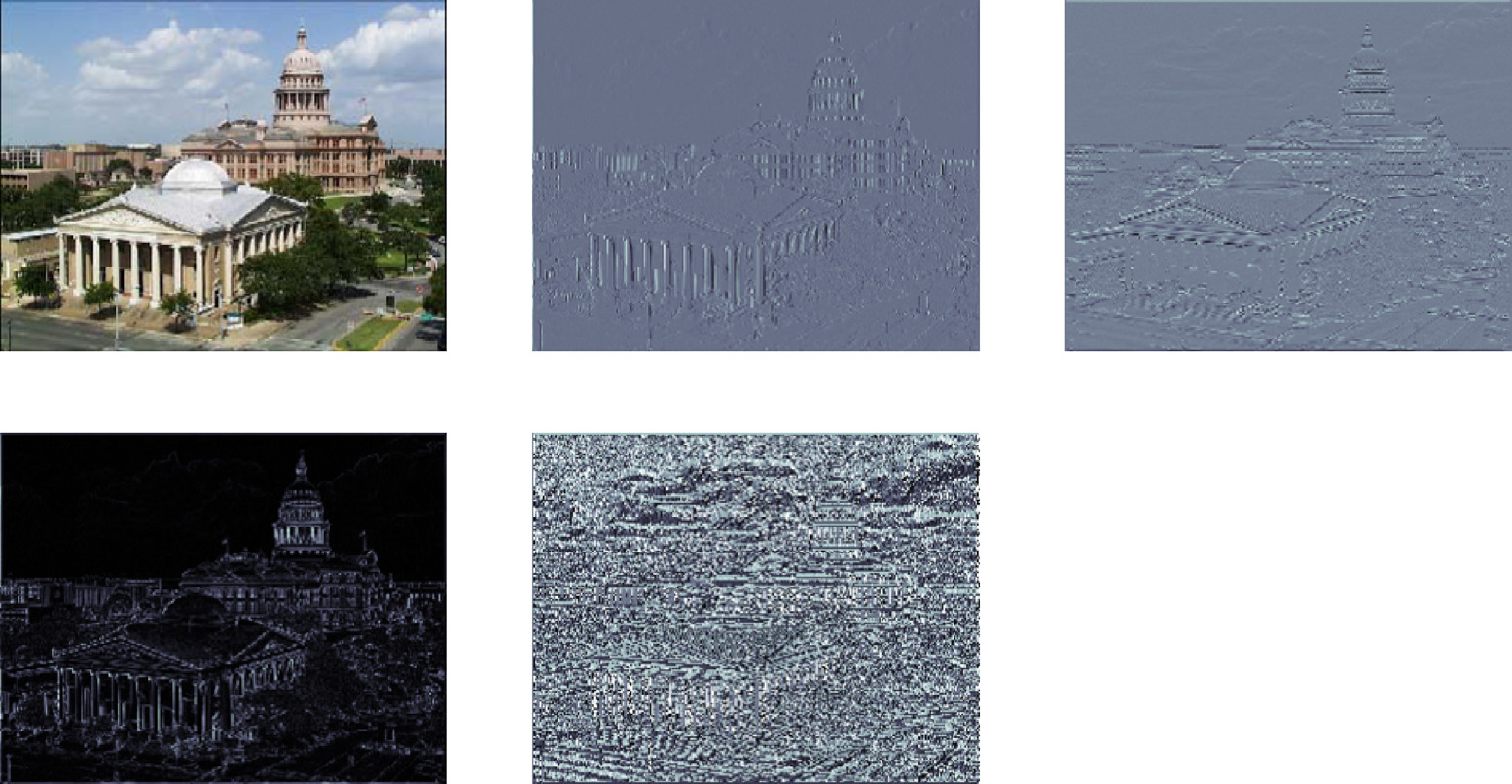
首先计算输入载体图像在 x方向和 y方向上的梯度,如图2.4所示。然后根据 x和y梯度图像计算梯度幅值和角度。对梯度角度进行量化,使所有角度落在指定的固定范围内,这有助于处理微小的角度变化。为了找到每个像素的主导边缘方向,使用
从量化角度图像中获取2 × 2块大小。显然,并非所有像素都包含可用于嵌入的有效信息。因此,可以通过调整阈值 T h来自适应地确定兴趣点。该阈值根据秘密消息长度自适应计算得出。
HOG算法是一种基于边缘的局部形状描述符,由Dalal等人提出。[14]它最初用于通过描述物体形状的局部边缘信息来解决目标检测问题。在本研究中,采用了类似HOG的思想来寻找每个块的主导梯度方向。通过对每个像素的梯度幅值按其对应的角度进行累加,我们选择在所有累加值中具有最大梯度幅值的梯度角度,作为载体图像中每个像素的主导角度。
用于提取主导边缘方向的HOG算法步骤如算法1所示。
算法1 HOG计算算法。
输入: 尺寸为 M× N 的输入载体图像 C
输出: 方向梯度直方图 H
1: 计算输入图像在 x和 y方向上的梯度:
Gx= I ∗ Kx, Gy= I ∗ Ky, (2.1) 其中 Kx=[−1 1] 和 Ky=[−1 1]。
2:使用以下公式计算幅度和边缘方向
G=√G²x+ G²y, θ= tan⁻¹( Gy / Gx ). (2.2)
3:使用公式将幅度值归一化到 [0 −1] 范围内
Gn= G / max(G) . (2.3)
4: 根据表 2.1 中给出的量化范围对边缘方向的角度进行量化。
5:将载体图像划分为一组 2× 2个不重叠的块。按如下方式计算方向梯度直方图(HOG):
Hi,j= ∑ x,y∈B(i,j) s(θq= Q), i= 0,1,…, N −1, j= 0,1,…, M −1, (2.4)
其中 Q={1,2,3,4,5}是量化角度标签,且
s(x)={ Gm, x is true; 0, x is false }, (2.5)
其中 s(x) 是指示函数,Hi, j 是用于累积每个块 B(i, j) 内梯度幅值 Gm 的函数。
表2.1 角度量化范围。
| 角度范围 θ | 量化值 |
|---|---|
| [0–22.5]或[157.5–180] | 1 或 5 |
| [22.5–67.5] | 2 |
| [67.5–112.5] | 3 |
| [112.5–157.5] | 4 |
2.3.2 感兴趣像素(POI)
通过寻找载体图像各分块的累积梯度幅值直方图的最大值,得到主导幅度值。当某个像素的累积梯度幅值大于选定的阈值参数 Th时,可将其定义为感兴趣像素(POI)。 Th的值根据秘密消息的比特数自适应确定。这些像素称为感兴趣像素(POIs),位于边缘区域;而位于载体图像平滑区域的其他像素则称为非感兴趣像素(PONIs)。此处利用POIs进行秘密消息的嵌入/提取,嵌入方向为对应的量化主导角度。
确定兴趣点(POI)的第一阶段是使用算法 Th计算阈值2。它为HOG边缘检测器找到一个合适的高阈值。初始时, tmin设置为0,而tmax设置为1。位于 Th和[0,1]之间的阈值必须存储在发送给预期接收者的隐写图像的最后一个像素中。设 limit为消息长度的1%, HOG边缘检测器在给定阈值下返回的边缘像素数量为 Ne,该值是 tmin与 tmax之间的中值。
边缘所属的像素数量Ne很可能不完全等于秘密消息的长度 Sm。为缓解此问题,搜索的终止条件被修改,使其返回的像素数量Se大于或等于 Sm,并使用限值来为 Ne设定上限。载体图像的兴趣点通过执行算法3的步骤进行分配。
2.3.3 嵌入算法
嵌入算法的第一阶段是应用前述的HOG步骤对载体图像进行处理,以确定每个像素的主导幅度和角度,如算法1所示。然后根据秘密消息的长度自适应地计算阈值 Th,具体方法见算法 2。之后,可根据算法3确定并计算适当的边缘POI数量。显然,嵌入的秘密比特数量取决于量化范围表,该表可分为高和低级别,如图2.5所示。假设每个POI中的左上角像素为参考边缘像素,另一个像素则根据主导边缘方向选择。为实现利用POI隐藏秘密消息的嵌入算法,应执行算法4的步骤。
算法2 阈值 Th计算算法。
输入:载体图像 C,秘密消息长度 Sm,边缘像素容量 Se
输出:获取所需兴趣点的阈值 Th 值
-
初始化 限值 = 0.01× Se, tmin= 0, tmax= 1, Ti= (tmin+ tmax)/2.
-
边缘像素数量通过以下公式计算
Ne= Count(H OG(C, T)), (2.6)
其中Ne=为HOG计算返回的边缘像素数量。 -
计算 Se 和 Sm 之间的差值 diff ,以使用公式确定嵌入所需的边缘像素数量
diff= Se − Sm. (2.7) -
根据以下条件调整 Th值:
如果diff< limit ⇒ Th= tmin。
如果diff< 0⇒ Th= Ti。
如果diff< limit,使用公式计算所需的阈值 Th
Th= limit / Sm. (2.8)
if Th> tmax ⇒ Th= (tmin+ tmax)/2. -
重复步骤(1‐4),直到将所需值 Th调整完毕以容纳整个秘密消息的长度。
算法3 兴趣点识别。
输入: 载体图像 C,阈值 Th
输出: 嵌入秘密消息所需的兴趣点数量。
- 对于载体图像中的每个像素,主导幅度 G= √Fx²+ Fy² 和角度值被选为 2× 2 HOG 块的最大值(即 POI= Max(G))。
- 根据算法 2 计算阈值 Th的值。
- 根据 Th 的值确定嵌入所需的兴趣点数量。
- 使用相应的量化主导角度,根据表 2.1 确定所选每个兴趣点的嵌入边缘方向。
算法4 P‐ADPVD嵌入算法。
输入: 大小为 M× N 的载体图像 C 和大小为 N 的秘密消息 Sm
输出: 大小为 M× N 的隐写图像 S
- 将彩色图像分离为三个颜色分量(R,G,B)。
- 将载体图像划分为每种颜色通道大小为 2× 2的块集合。
- 通过应用算法 3 中的步骤,找出载体图像的兴趣点。
-
对于每个兴趣点,根据主方向计算块的差值。
as:
dh= |pi,j −pi,j+1|,
dv= |pi,j −pi+1,j|,
dd= |pi,j −pi+1,j+1|, (2.9)
其中 dh、 dv 和 dd 分别表示水平、垂直和对角线嵌入方向。 -
对于每个颜色通道,应用PVD技术[15]在每个POI的四个边缘像素中隐藏秘密比特,并根据其主导角度方向将像素值修改为(p′ i,j ,p′ i,j+1)、(p′ i,j ,p′ i+1,j)和(p′ i,j ,p′ i+1,j+1),以对应三个方向。
-
将三个颜色通道的嵌入容量相加,计算总嵌入容量 (EC)
EC= ∑₃ᵢ₌₁ (ECi h, ECi v, EC i d), (2.10)
其中ECh, ECv和 ECd为三种嵌入方向,即水平、垂直和对角线,分别。 -
根据算法2,如果(EC)小于秘密消息所需的长度,则修改 Th的值,然后重复步骤(3–7)。否则,进入步骤8。
-
在嵌入完整的秘密消息后生成隐写图像 S。
2.3.4 提取算法
在此过程中,接收端可以从隐写图像中提取隐藏的秘密比特。当对隐写图像应用HOG检测时,在兴趣点嵌入比特后梯度幅值不会发生变化。通过使用如图2.5所示的量化范围表,应用以下步骤来提取秘密比特流。
算法5 P‐ADPVD提取算法。
输入: 大小为 M× N 的隐写图像 S。
输出: 大小为 N 的秘密消息 Sm。
- 从隐写图像中提取阈值 Th。
- 将隐写图像分离为三个颜色分量(R,G,B)。
- 对每个颜色通道,将载体图像划分为互不重叠的 2 × 2像素块。
-
使用算法 3 中的步骤找出兴趣点。
-
对于隐写图像中的每个兴趣点,计算每个通道中的新差值
d′ h= |p′ i,j −p′ i,j+1|,
d′ v= |p′ i,j −p′ i+1,j|,
d′ d= |p′ i,j −p′ i+1,j+1|, (2.11)
其中 d′ h、 d′ v和 d′ d分别是水平、垂直和对角线方向的差值。 -
对于每个颜色通道中的像素,根据每种主方向(水平、垂直和对角线)的范围2.5确定最佳范围。因此
b′ h= d′ h − lh,
b′ v= d′ v − lv,
b′ d= d′ d − ld, (2.12)
其中lh、 lv和 ld分别是用于在水平、垂直和对角方向上嵌入秘密消息的每个像素块范围的下边界。 -
使用公式将 b′ h 、 b′ v和 b′ d 转换为每个颜色通道(红、绿、蓝(R,G,B))中每个块方向对应的二进制隐藏秘密比特 t
t= ⌊log₂ wi, j⌋ , (2.13)
其中 wi, j 是像素差值 d′ h 、 d′ v 和 d′ d 的范围宽度。 -
拼接提取的比特以获得秘密消息 Sm。
2.4 结果与讨论
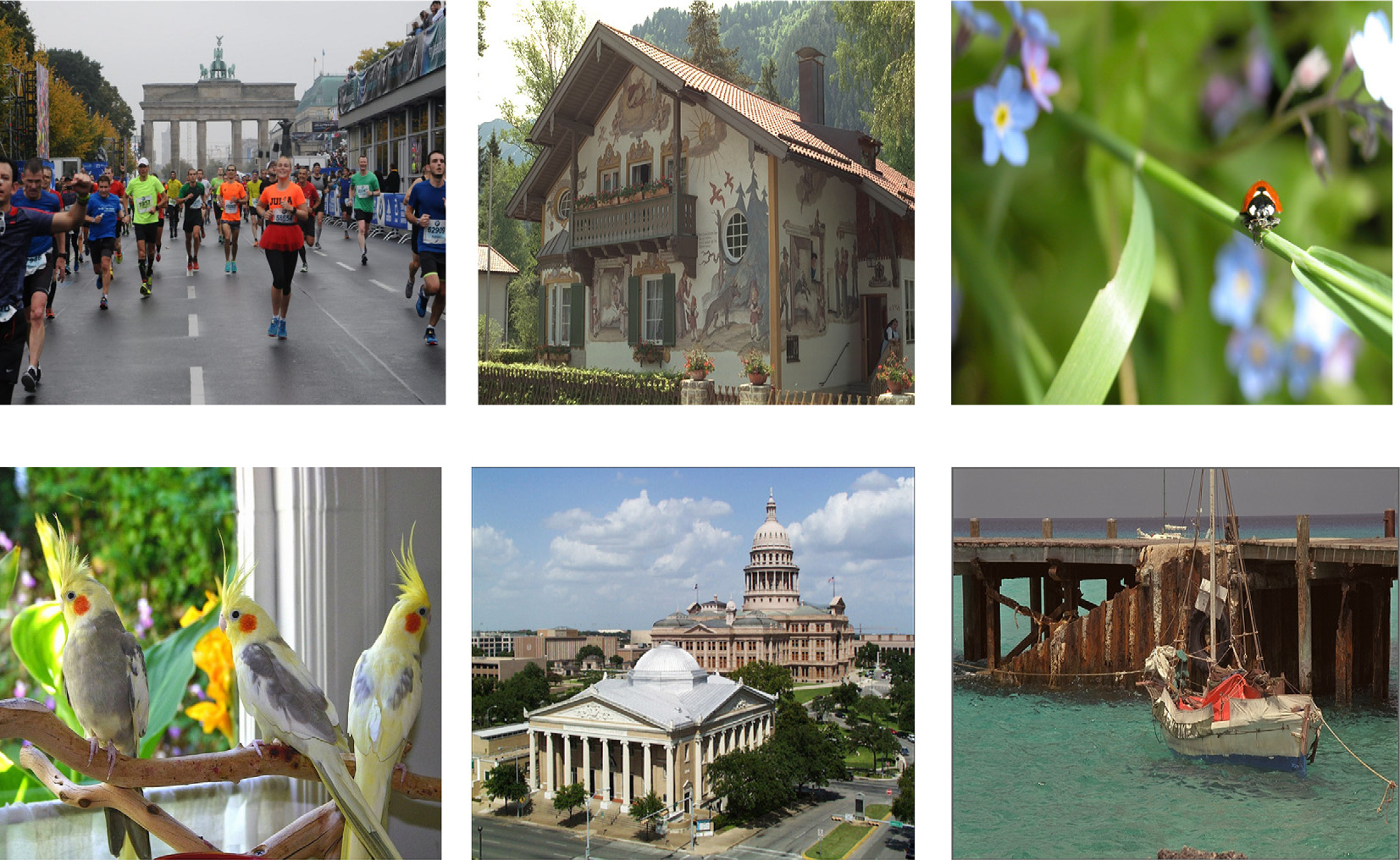
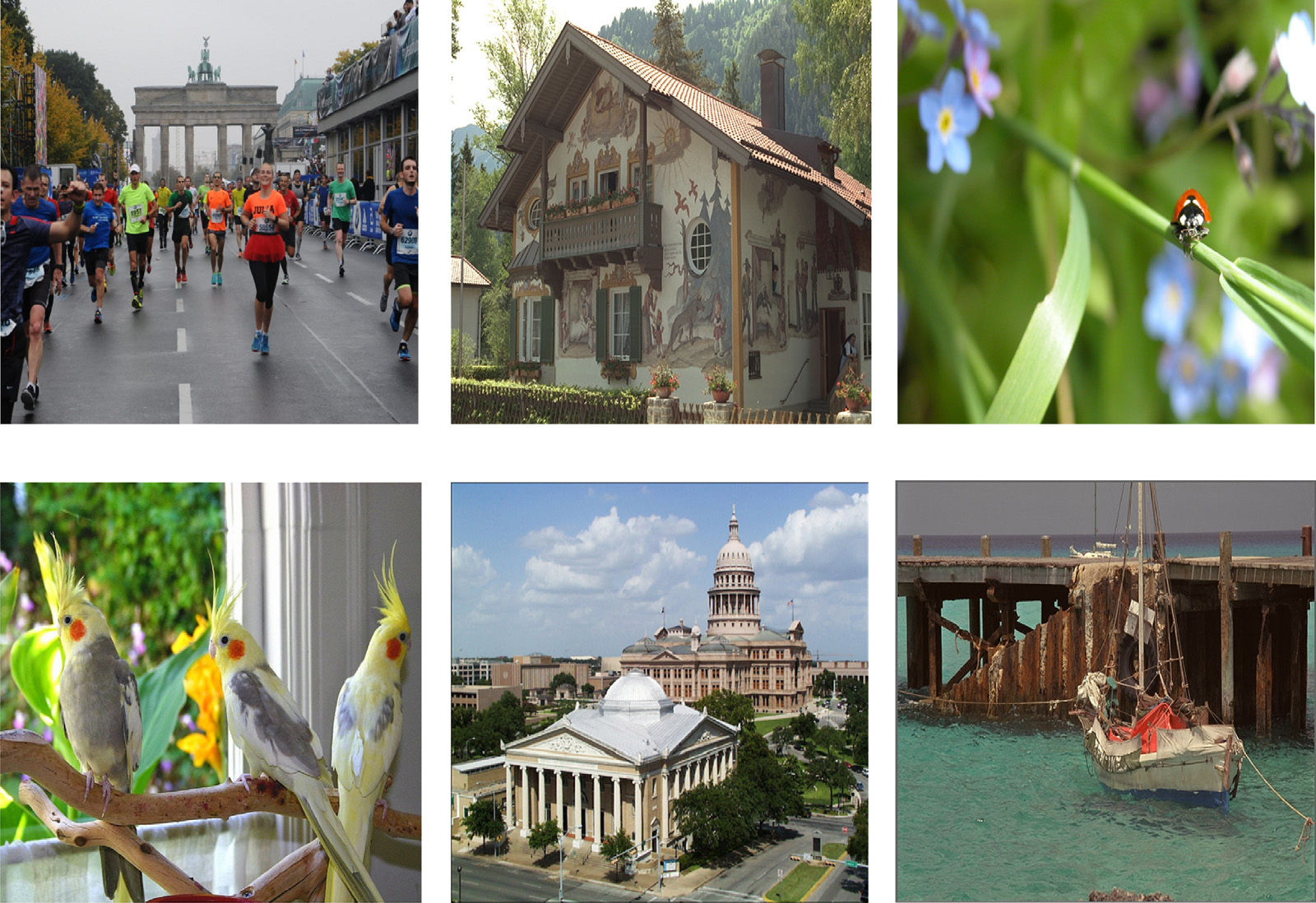
本节通过进行多个实验来研究所提出的P‐ADPVD数据隐藏方法的性能,采用嵌入容量、视觉质量和安全基准作为性能指标。该方法使用MATLAB®在六幅大小为 512× 512像素的彩色图像作为载体图像上进行实现和测试,如图2.6所示。
2.4.1 基于HOG的嵌入方向分析
我们利用每个颜色通道(红、绿、蓝)的梯度方向直方图来研究载体图像的嵌入方向。由于以往基于PVD的隐写方法的主要缺点是使用单一的嵌入方向在所有像素中隐藏数据,因此本文提出的方法通过使用HOG为每个像素采用不同的嵌入方向来克服这一问题。数字图像包含不同方向的边缘以表示图像中物体的形状,通过在小块区域中寻找边缘的主导方向来利用这一特性,不仅有助于正确隐藏数据,还能提高安全性。
表2.2 根据兴趣点数量确定的三种嵌入方向。
|
载体图像
512× 512 | 水平方向 | 垂直方向 | 对角方向 | |||
|---|---|---|---|---|---|---|
| 兴趣点数量 | 容量(bpp) | 兴趣点数量 | 容量(bpp) | 兴趣点数量 | 容量(bpp) | |
| 图像(A) | 21,387 | 513,288 | 12,358 | 288,216 | 28,325 | 679,800 |
| 图像(B) | 31,844 | 764,256 | 6,690 | 160,560 | 24,758 | 594,192 |
| 图像(C) | 24,455 | 586,920 | 11,170 | 268,080 | 29,228 | 701,472 |
| 图像(D) | 27,512 | 660,288 | 7,800 | 187,200 | 30,061 | 721,464 |
| 图像(E) | 21,680 | 520,320 | 13,035 | 312,840 | 30,816 | 739,584 |
| 图像(F) | 24,652 | 591,648 | 9,770 | 234,480 | 31,043 | 745,032 |
| 平均值 | 25,255 | 606,120 | 10,137 | 241,896 | 29,039 | 696,924 |
2.4.2 使用兴趣点的嵌入方向分析
之前基于PVD的隐写方法的另一个主要缺点是与LSB替换方法相比,其嵌入容量较低。我们可以通过采用不同的嵌入方向来克服这一问题。在表2.2中,根据六个RGB图像的兴趣点数量及其相应的嵌入容量,研究了三种边缘方向(水平、垂直和对角方向)的比较结果。从获得的结果可以得出结论:对角方向边缘具有最多的兴趣点数量,从而相较于其他两个方向实现了最高的嵌入容量。此外,对角方向的平均兴趣点数量和容量分别约为29,039个兴趣点和 696,924比特,其中阈值 Th= 0用于获取每个兴趣点方向的最大容量。这是由于对角线像素之间的相关性较低,而垂直和水平方向上的像素具有较高的相关性所致。
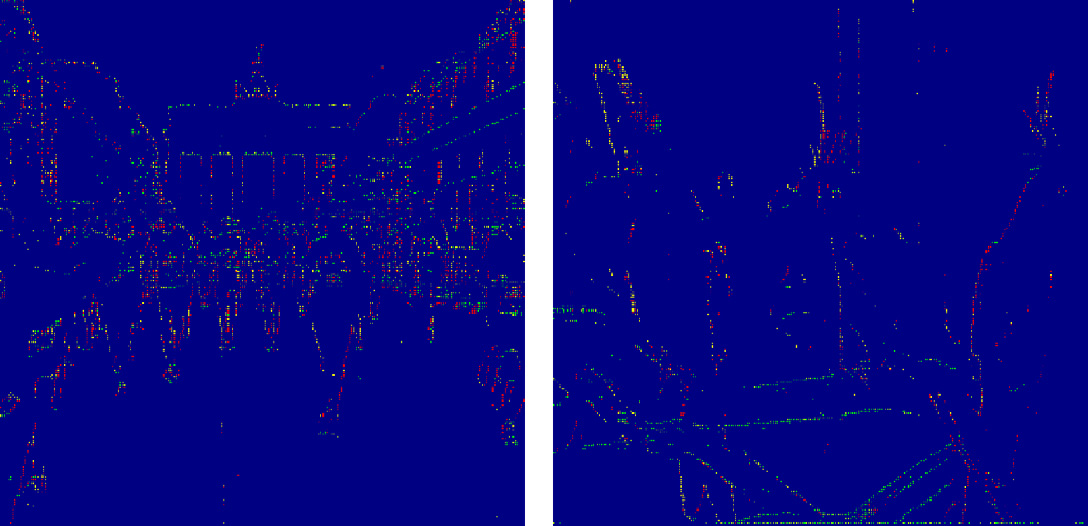
基本上,兴趣点数量根据载体图像的纹理和属性进行控制,可自适应地确定以嵌入秘密消息。例如,图像(B)具有最多的兴趣点数量,其嵌入容量最高,且沿水平边缘方向,与其他五幅测试图像不同。图2.7显示了载体图像在三个方向(水平、垂直和对角线)上的兴趣点嵌入方向,其中红色、绿色和黄色分别表示水平、对角线和垂直边缘方向。显然,基于 HOG的算法能够自动捕捉载体图像的主导边缘方向,从而引导PVD算法在合适的方向上嵌入秘密数据。
2.4.3 阈值对兴趣点的影响
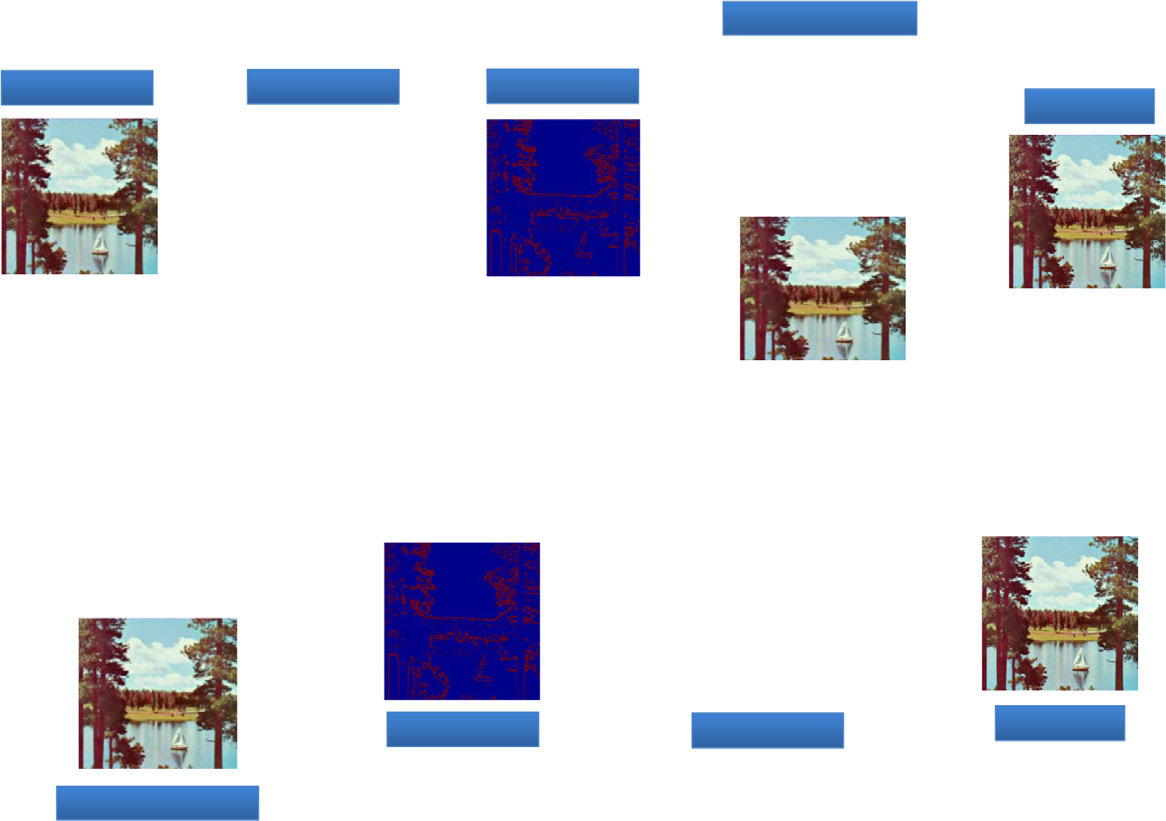
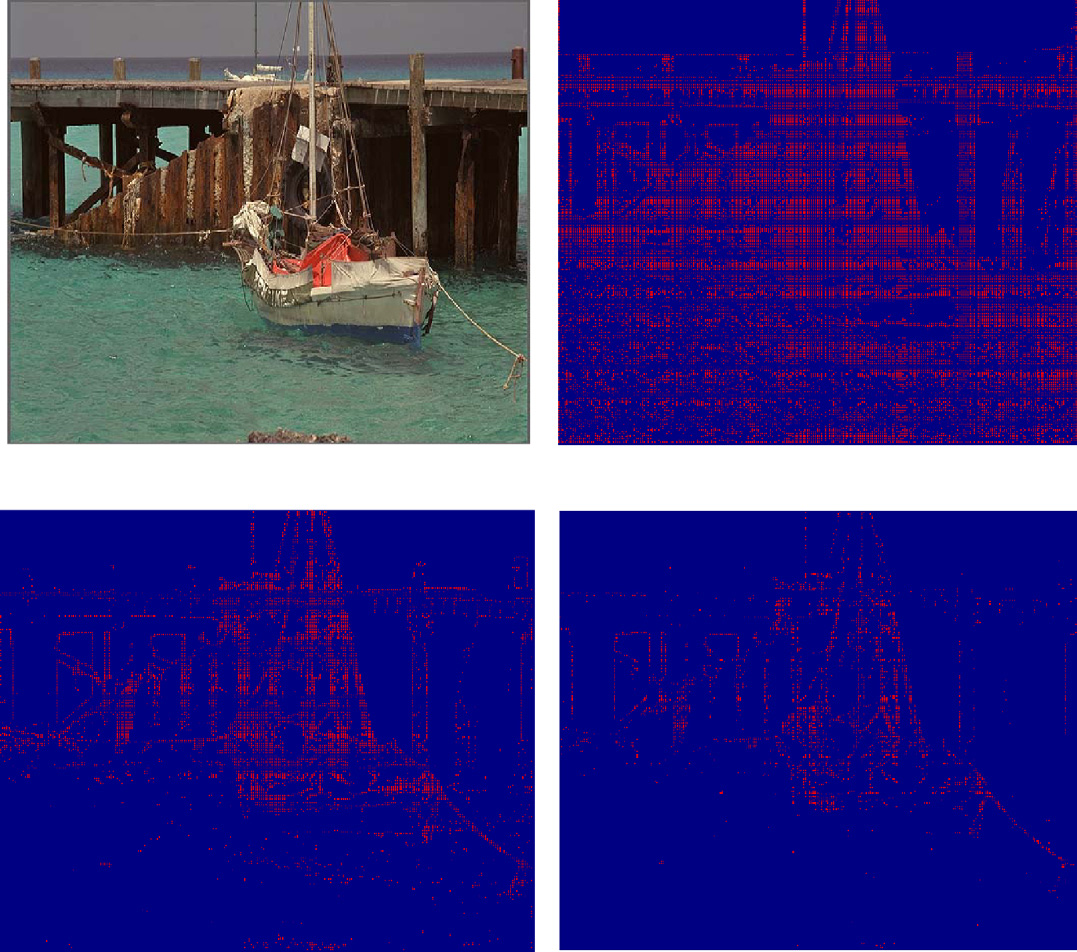
在本实验中,我们表明兴趣点数量可能根据阈值参数的值而变化 Th。对于较小的阈值,兴趣点数量增加;否则,兴趣点数量减少。图 2.8展示了载体图像在不同阈值下两组像素,即感兴趣像素(POIs)和非感兴趣像素(PONIs),的示例
values Th= 0,0.01和0.1,分别。蓝色像素指的是非感兴趣像素(PONIs),而红色像素属于兴趣点(POIs)。这导致兴趣点(POIs)根据T h的值自适应地确定,该值可在0(最小值)和1(最大值)之间设定。此外,该值通过算法2根据秘密消息的长度计算得出。
2.4.4 阈值对容量和视觉质量的影响
在本实验中,我们研究了阈值变化对嵌入容量和视觉质量的影响,这两者被用作隐写术方法的基准评估[16,17]。嵌入容量定义为可嵌入载体图像像素中的秘密比特数。它可以表示为载体图像像素总大小的相对百分比,或以每像素比特(bpp)等绝对度量表示。此外,峰值信噪比值被用作衡量隐写图像不可感知性的基准,其单位为分贝(dB)。
表2.3 阈值变化对嵌入容量的影响。
|
载体图像
512× 512 | Th范围= 0–0.01 | Th范围= 0.01–0.1 | Th范围= 0.1–1.00 | |||
|---|---|---|---|---|---|---|
| 峰值信噪比(dB) | 容量% | 峰值信噪比(dB) | 容量% | 峰值信噪比(dB) | 容量% | |
| 图像(A) | 42.79 | 25.0 | 43.34 | 10.77 | 49.16 | 6.5 |
| 图像(B) | 40.94 | 25.0 | 42.94 | 10.79 | 46.86 | 6.0 |
| 图像(C) | 46.36 | 25.0 | 50.90 | 10.39 | 54.75 | 6.8 |
| 图像(D) | 44.12 | 25.0 | 47.63 | 12.35 | 51.98 | 6.6 |
| 图像(E) | 40.18 | 25.0 | 42.75 | 10.50 | 48.92 | 6.7 |
| 图像(F) | 42.96 | 25.0 | 43.13 | 10.94 | 48.94 | 6.4 |
| 平均值 | 42.89 | 25.0 | 45.12 | 11.0 | 50.10 | 6.50 |
图 2.9展示了将 Th从 0变化到 1时,对六个隐写图像的嵌入容量(bpp)的影响。实验结果表明,嵌入数据位的数量取决于图像中现有边缘信息的多少,并随着 Th值的减小而增加。隐写图像(E)由于包含丰富的边缘,具有较高的嵌入容量,从而产生大量的兴趣点。
图 2.10展示了将 Th从0变化到 1时,对六个隐写图像的峰值信噪比值的影响。隐写图像(C)具有较高的峰值信噪比值,因而视觉质量更好。实验结果证明,峰值信噪比值随着 Th的减小而增加。本实验得出结论:峰值信噪比值与嵌入容量之间存在权衡关系,可通过阈值 Th进行控制。此外,阈值可根据秘密消息的数据量自适应地计算。对于较小的秘密消息尺寸,Th取大值,而对于较大的秘密消息,Th的值足够小以容纳所有数据。
2.4.5 视觉质量分析
在本实验中,使用了四种不同的图像质量评估指标,即均方误差(MSE)、峰值信噪比(PSNR)、归一化互相关(NCC)和结构相似性指数测量(SSIM),用于衡量隐写图像的视觉质量。计算这四项指标以描述不同的质量方面,并评估所提出方法的有效性。均方误差用于计算载体图像和隐写图像之间的差值[18]。PSNR可被定义为一种统计图像质量
用于衡量载体图像与隐写图像之间失真的失真估计水平。PSNR值越高,表示失真越小,从而带来更高的视觉质量。另一方面,PSNR值越低会导致隐写图像发生显著变化,这些变化容易被人类视觉系统察觉[19]。NCC显示了隐写图像与载体图像之间的相关性强弱。NCC的取值范围在0和 1之间。NCC值等于1意味着本文提出的方法生成的隐写图像对裁剪、旋转和缩放等各种图像处理攻击具有完全的鲁棒性[20]。SSIM是一种图像质量评估方法,通过比较载体图像与隐写图像来获取它们之间的相似性。它被提出作为对两种传统度量标准(PSNR和MSE)的改进,因为后者已被证明与人类视觉系统不兼容[21]。MSE、PSNR、NCC和SSIM通过以下公式计算:
$$
MSE= \frac{1}{M \times N} \sum_{i=0}^{M-1} \sum_{j=0}^{N-1} (S - C)^2, \quad (2.14)
$$
$$
PSNR= 10 \log_{10} \left( \frac{255^2}{MSE} \right), \quad (2.15)
$$
$$
NCC= \frac{\sum_{i=0}^{M-1} \sum_{j=0}^{N-1} (S(i, j) \cdot C(i, j))}{\sqrt{\sum_{i=0}^{M-1} \sum_{j=0}^{N-1} S(i, j)^2}}, \quad (2.16)
$$
$$
SSIM(C, S)= \frac{(2\mu_C\mu_S+ c_1)\cdot(2\sigma_{CS}+ c_2)}{(\mu^2_C+ \mu^2_S+ c_1)\cdot(\sigma^2_C \sigma^2_S+ c_2)}, \quad (2.17)
$$
其中μC是 C的平均值,μS是 S的平均值,σ²C是 C的方差,σ²S是 S的方差,σCS是 C和 S的协方差,c₁=(K₁L)²和 c₂=(K₂L)²是用于稳定分母较小时除法运算的两个变量,L是像素值的动态范围,K₁= 0.01和 K₂= 0.03为默认值,C是嵌入前载体图像的像素,S是嵌入后隐写图像的像素。
另一种基于统计度量的用于评估隐写图像质量的指标是通用图像质量指数 Q[22]。Q 的值越高,表示载体图像和隐写图像之间的相关性越高,它们之间的差异越小。通用图像质量指数 Q 可通过以下方式计算
$$
Q= \frac{4 \sigma_{xy} \bar{x} \bar{y}}{(\sigma^2_x+ \sigma^2_y)[(\bar{x})^2+(\bar{y})^2]}, \quad (2.18)
$$
其中
$$
\bar{x}= \frac{1}{M\times N} \sum_{i=0}^{M-1} \sum_{j=0}^{N-1} (x_{ij}), \quad \bar{y}= \frac{1}{M\times N} \sum_{i=0}^{M-1} \sum_{j=0}^{N-1} (y_{ij}),
$$
$$
\sigma^2_x= \frac{1}{(M\times N)-1} \sum_{i=0}^{M-1} \sum_{j=0}^{N-1} (x_{ij} - \bar{x})^2, \quad \sigma^2_y= \frac{1}{(M\times N)-1} \sum_{i=0}^{M-1} \sum_{j=0}^{N-1} (y_{ij} - \bar{y})^2, \quad (2.19)
$$
$$
\sigma^2_{xy}= \frac{1}{M \times N} \sum_{i=0}^{M-1} \sum_{j=0}^{N-1} (x_{ij} - \bar{x})(y_{ij} - \bar{y}),
$$
其中 M × N是载体图像的大小,x是载体图像中像素的值,y是隐写图像中像素的值,$\bar{x}$是 x的均值,$\bar{y}$是 y的均值,而σ²x、σ²y和 σ²xy分别是 x和 y图像的方差和协方差。
表2.4 提出的P‐ADPVD方法在视觉质量基准上的实验结果。
|
载体图像
512× 512 | PSNR | MSE | NCC | SSIM | Q |
|---|---|---|---|---|---|
| 图像(A) | 52.07 | 0.4 | 0.9999 | 0.9999 | 0.9999 |
| 图像(B) | 48.45 | 0.92 | 0.9999 | 0.9999 | 0.9999 |
| 图像(C) | 61.99 | 0.04 | 1 | 1 | 0.9999 |
| 图像(D) | 56.91 | 0.13 | 1 | 1 | 0.9999 |
| 图像(E) | 48.77 | 0.86 | 0.9999 | 0.9999 | 0.9999 |
| 图像(F) | 51.73 | 0.42 | 0.9999 | 0.9999 | 0.9999 |
| 平均值 | 53.23 | 0.46 | 1 | 1 | 0.9999 |
所有指标均证实了提出的P‐ADPVD方法在隐藏秘密数据时不会对隐写图像造成显著变化的有效性。显然,隐写图像具有很高的不可感知性,且未观察到任何视觉伪影,这使得隐写分析者难以轻易发现隐藏信息的存在,如图2.11所示。
2.4.6 与其他基于自适应PVD的方法的比较
在本实验中,我们将提出的P‐ADPVD方法与其他著名的基于自适应PVD的方法(包括 [23],[24],和[12])进行比较,比较指标为NCC和SSIM值,所用图像来自USC‐SIPI图像数据库中的六幅彩色图像:莱娜、狒狒、喷气式飞机、辣椒、船和房屋。这些图像通常与 280,000比特的秘密消息一起使用,将该秘密消息隐藏于每幅图像中,以作为图像质量评估的衡量标准。表2.5中报告的提出P‐ADPVD方法的实验结果证实了该方法在视觉质量上的优越性,其NCC和SSIM指标均达到单位值。这一结果意味着载体图像和隐写图像高度相关,二者之间的差异极小。显然,NCC和
表2.5 提出的P‐ADPVD方法与自适应PVD‐based方法的比较根据归一化相关系数和结构相似性指数的方法。
|
载体图像
(512× 512) | 1×2自适应PVD | Pradhan的方法 | 2×2自适应PVD | 本文提出的方法 | ||||
|---|---|---|---|---|---|---|---|---|
| NCC | SSIM | NCC | SSIM | NCC | SSIM | NCC | SSIM | |
| Lena | 0.9981 | 0.9976 | 0.9990 | 0.9989 | 0.9992 | 0.9989 | 0.9999 | 0.9996 |
| 狒狒 | 0.9981 | 0.9951 | 0.9992 | 0.9982 | 0.9993 | 0.9987 | 0.9998 | 0.9995 |
| 辣椒 | 0.9981 | 0.9976 | 0.9992 | 0.9987 | 0.9993 | 0.9989 | 0.9999 | 0.9998 |
| Jet | 0.9962 | 0.9958 | 0.9995 | 0.9986 | 0.9996 | 0.9989 | 0.9994 | 0.9997 |
| Boat | 0.9981 | 0.9975 | 0.9996 | 0.9982 | 0.9997 | 0.9989 | 0.9995 | 0.9998 |
| 房屋 | 0.9971 | 0.9966 | 0.9993 | 0.9991 | 0.9995 | 0.9991 | 0.9999 | 0.9998 |
| 平均值 | 0.9976 | 0.9967 | 0.9993 | 0.9986 | 0.9994 | 0.9989 | 0.9997 | 0.9997 |
在所有情况下,提出的P‐ADPVD方法的SSIM值均高于[23],[12],和[24]中的方法。这使得载密彩色图像具有高度的不可感知性,人类视觉系统(HVS)无法察觉到任何明显变化。表格末尾计算了六幅图像各指标的平均值。该平均值表明,就NCC和SSIM指标而言,提出的 P‐ADPVD方法优于这些方法,其平均值分别为0.9997和0.9997。
2.4.7 与基于彩色图像的方法的比较
表 2.6总结了提出的P‐ADPVD方法与其他知名基于自适应PVD的方法之间的比较,包括 1×3像素块 [25]、 2×2像素块[23]、 2×3以及 3×2像素块 [12],和Mandal与Das的 [26] 方法在六幅彩色图像上的嵌入容量与PSNR值方面的对比。提出的P‐ADPVD方法所得结果证实了其在保持视觉质量的同时具有更高的嵌入容量,平均值分别为 1,554,893比特和 45.51。该结果表明,由于利用了所有边缘区域进行隐藏,可以获得较高的嵌入秘密数据。此外,载体图像和隐写图像之间几乎不可感知。所提出方法的峰值信噪比值优于Mandal和Das [26] 以及Swain的 2 × 2像素块 [23]方法。这也验证了该方法在将秘密数据嵌入隐写图像时,不会被人眼视觉系统(HVS)察觉到任何明显变化,从而相比其他基于自适应PVD的方法具有更高的安全性。通常情况下,自适应隐写术在嵌入容量与PSNR值之间存在权衡。当提供较高的PSNR时,嵌入容量会被牺牲,反之亦然。需要注意的是,使用提出的P‐ADPVD方法生成的隐写图像与其原始图像在人眼观察下完全不可区分,这使得相比以往研究具有更高的安全性。
表2.6 根据容量和峰值信噪比,将提出的P‐ADPVD方法与其他自适应PVD‐based方法进行比较。
|
载体图像
512× 512× 3 | Luo 等人的 1× 3像素分块自适应PVD | Mandal & Das方法自适应PVD | Swain的 2× 2像素分块自适应PVD | |||
|---|---|---|---|---|---|---|
| 容量(比特) | PSNR | 容量(比特) | PSNR | 容量(比特) | PSNR | |
| Lena | 229,037 | 48.79 | 1,234,394 | 40.21 | 1,341,191 | 45.04 |
| 狒狒 | 611,197 | 48.03 | 1,406,405 | 37.14 | 1,489,945 | 47.13 |
| 辣椒 | 264,058 | 48.32 | 1,236,715 | 40.64 | 1,350,251 | 45.73 |
| Jet | 145,755 | 48.76 | 1,224,178 | 39.35 | 1,267,690 | 44.86 |
| Boat | 389,588 | 48.20 | 1,289,871 | 40.37 | 1,424,967 | 46.08 |
| 房屋 | 259,413 | 48.41 | 1,263,038 | 39.62 | 1,339,985 | 43.58 |
| 平均值 | 316,508 | 48.42 | 1,275,767 | 39.56 | 1,369,005 | 45.40 |
|
载体图像
512× 512× 3 | Pradhan的 2× 3像素分块自适应PVD | Pradhan的 3× 2像素分块自适应PVD | 提出的P‐ADPVD 方法 | |||
|---|---|---|---|---|---|---|
| 容量(比特) | PSNR | 容量(比特) | PSNR | 容量(比特) | PSNR | |
| Lena | 1,445,784 | 50.89 | 1,425,521 | 50.61 | 1,548,888 | 46.76 |
| 狒狒 | 1,532,417 | 52.29 | 1,527,208 | 52.36 | 1,571,784 | 43.75 |
| 辣椒 | 1,418,101 | 51.29 | 1,409,621 | 51.22 | 1,572,864 | 46.71 |
| Jet | 1,381,432 | 50.65 | 1,362,765 | 50.77 | 1,570,800 | 45.54 |
| Boat | 1,479,835 | 51.42 | 1,474,106 | 51.43 | 1,502,864 | 45.58 |
| 房屋 | 1,431,346 | 49.09 | 1,429,845 | 49.18 | 1,562,160 | 44.74 |
| 平均值 | 1,448,153 | 50.94 | 1,438,178 | 50.93 | 1,554,893 | 45.51 |
2.4.8 与基于边缘的方法的比较
本实验旨在通过使用BOSS‐base 1.01数据库,探究提出的P‐ADPVD方法在可用于嵌入的边缘像素数量方面的性能。此外,还比较了嵌入秘密数据后载体图像和隐写图像之间的差异。该数据库包含10,000灰度 512 × 512图像。从中随机选取 1000幅图像进行实验。表 2.7列出了边缘像素总数、其百分比平均值以及载体图像与隐写图像之间的边缘像素差异。从获得的结果可以看出,HOG算法检测出的边缘像素数量多于其他三种边缘检测器(Canny、 Sobel和Prewitt),可用于更高的嵌入数据量。边缘像素的平均数量约为 64,638和 24.66%,而HOG边缘检测器在载体图像与隐写图像之间的平均差异被限制在 1.55%以内,低于 Canny算法边缘检测器。这表明,提出的P‐ADPVD方法在隐藏容量和安全性方面优于其他检测器。
表2.7 根据四种边缘检测算法,图像与其隐写图像之间边缘像素的平均差值。
| 算法 | 总边缘像素 |
边缘像素
(平均值) | 边缘像素 % | 差值 平均值 | 差值 % |
|---|---|---|---|---|---|
| Canny | 262,144 | 23,818 | 9.1 | 383 | 1.61 |
| Sobel | 262,144 | 8,451 | 3.2 | 7 | 0.09 |
| Prewitt | 262,144 | 8,407 | 3.2 | 8 | 0.1 |
| HOG | 262,144 | 64,638 | 24.66 | 1000 | 1.55 |
2.4.9 防止像素差分直方图分析的安全性
由于基于PVD的方法可能被隐写分析者利用PVD直方图分析检测到,因此对提出的P‐ADPVD方法使用像素差值直方图(PDH)进行了测试和分析。先前的研究工作[15,27]引入了PVD直方图分析,用于检测和分析隐写算法所产生的伪影。当嵌入率较高时,有可能评估并计算秘密消息的大小。图2.12、2.13和2.14中对之前的六幅彩色图像的载体图像和隐写图像均进行了PDH分析。所得结果表明,在大约嵌入280,000比特的秘密消息前后,彩色图像的直方图没有显著变化。此外,隐写图像的像素值仅存在轻微失真,这使得隐写分析者难以发现隐藏消息的存在。应用所提出的P‐ADPVD方法后得到的直方图与载体图像的直方图几乎一致。该分析说明了所提出方法的鲁棒性,因为它在输入彩色图像的所有通道中,对自适应选择的像素隐藏了不同数量的比特。
2.4.10 抗统计RS隐写分析安全性
韦斯特菲尔德[28]或普罗沃斯[29]的统计方法忽略了大量非常重要的信息(即隐写图像中像素的位置)。直观上可以理解,如果能够利用隐写图像中的空间相关性,我们将能够构建更加可靠和准确的检测方法。然而,揭示并量化图像中存在的某些伪随机成分与图像本身之间的微弱关系并不容易。对于具有 M × N个像素且像素值来自集合 P={0,…,255}的灰度载体图像,其空间相关性通过一个判别函数 f来捕捉,该函数为一组像素 f(x₁,…, xₙ) ∈ R分配一个实数 G=(x₁,…, xₙ)。该函数f定义为
$$
f(x_1,…, x_n)= \sum_{i=1}^{n-1} (|x_{i+1} -x_i|), \quad (2.20)
$$
用于衡量 G−的平滑度,而更嘈杂的组 G具有更大的判别函数值 f。在LSB嵌入算法中,随着图像噪度的增加,嵌入后 f的值将增大。
在典型图像中,翻转组 G更常导致判别函数 f增加而非减少。因此,规则组的总数大于奇异组的总数。设对于非负掩码 m,规则组的相对数量为 Rm(占所有组的百分比),Sm为奇异组的相对数量。Rm的值近似等于 R−m的值,且在隐写分析方法假设下,当载体图像采用不同载荷率时,Sm和 S−m也应满足相同关系以实现以下目标:
$$
R_m \sim R_{-m} \quad \text{and} \quad S_m \sim S_{-m}. \quad (2.21)
$$
显然,这种双统计隐写分析方法通常用于探索空间域中图像的相关性[30]。在图2.15、2.16和2.17中,给出了六幅彩色图像莱娜、狒狒、喷气式飞机、辣椒、船和汽车的RS分析曲线。其中 Rm和 R−m的曲线为直线,并且几乎相互重合。同样,Sm和 S−m的曲线也为直线,并且几乎相互重合。因此,关系 $R_m \sim R_{-m} > S_m \sim S_{-m}$ 成立。因此,当使用提出的 P‐ADPVD方法在不同嵌入POI载荷百分比下隐藏秘密数据位时,RS分析将无法检测到载体图像中的隐藏信息。该结果根据可用于嵌入秘密数据的边缘区域总数 Ne计算如下:
$$
P_{\text{payload}}= \frac{\text{POIs}}{N_e} \times 100, \quad (2.22)
$$
其中$P_{\text{payload}}$是嵌入数据的百分比,POIs是为了实现不同嵌入百分比而用于隐藏不同长度秘密消息的像素数量,Ne是可用于隐藏数据的边缘区域总数。
从前面图表中获得的结果可以看出,提出的P‐ADPVD方法在不同嵌入容量率(1–100)%下对统计RS分析具有鲁棒性,从而提高了对抗隐写分析攻击的安全性。
2.5 结论
在本章中,我们介绍了一种基于像素的自适应方向像素值差分(P‐ADPVD)数据隐藏方法,该方法由五个算法组成:HOG边缘检测、阈值计算、兴趣点识别、嵌入和提取算法。所提出的P‐ADPVD方法的主要优势在于能够在三个不同的边缘方向上嵌入秘密数据,而不仅仅像基于PVD的方法那样仅在一个方向上嵌入。实验结果与讨论展示了所提出的P‐ADPVD方法在不同评估指标下的有效性,包括隐藏容量、视觉质量和安全性。实验结果表明,P‐ADPVD方法能够抵抗针对各种图像数据库的隐写分析攻击,例如像素差值直方图和统计 RS分析。

















 647
647

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









