



引导过程
概念:按下开机的电源键直到屏幕显示到登录的画面,这中间系统做的一些开机的过程。
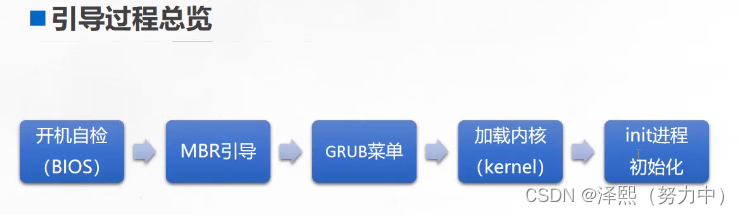
1):开机自检(BIOS)
服务器开机后,根据主板的bios设置,对cpu 内存 显卡 键盘等设备进行初步的检测。
检测成功后,根据预设的启动顺序(默认的顺序中,第二个是硬盘,或者手工设置的U盘启动),将系统的控制权转到了硬盘(大多数的时候是转移给本机的硬盘)。
总结:初步的检测硬件工作是否正常,检测成功后,把系统的引导控制权交给硬盘或者光驱或者u盘
2):MBR引导
MBR是硬盘的分区记录表,在这个表里面记录硬盘的分区,以及系统的启动盘的位置在哪。
系统的控制权到了硬盘,根据MBR记录表来找系统的启动盘,找到后将系统的控制权传递给包含操作系统引导文件的分区,以及MBR中记录系统的启动菜单
3)GRUB菜单
硬盘启动之后,找到系统分区,也找到了操作系统所在的位置,grub会显示启动菜单,包含所有当前可选的操作系统。
选择了其中一个操作系统后,系统转移控制权,转移到操作系统的内核文件。
4) 加载内核文件(kernel)
操作系统的内核文件是一个预先编译好的特殊的二进制文件(可执行的代码),介于硬件资源和系统程序之间,负责分配资源,调度资源。
只是分配和调度,并没有真正的运行,预加载到内存中,系统程序等到启动
5)init进程初始化
① /sbin/init,是系统中第一个进程,是所有其他进程的父进程。他在系统中的进程号永远是1.
init进程是串行的,一个一个启动的,速度较慢
② /lib/systemd/syetem,也是系统中第一个进程,也是所在其他进度的夫进程,他的进程号也永远是1
system进程是并行的,在加载内存当中是一起启动,速度快
systemd单元类型
概念:systemd是centos7之后用来管理系统服务进程的管理,使用单元模式(unit)来描述和控制系统服务和资源
特点:
1):支持并行服务,提高系统的启动速度
2):可以自动重启
3):可以在进程运行期间动态的控制他的资源和相关的服务参数
4):可以自动解决服务启动过程中的依赖关系
5):支持多种管理方式,如:命令行,图形化工具等。主要就是命令行
|
单元类型 | 扩展名 | 描述 |
| service | .service | 描述一个系统进程 |
| target | .target | 描述一组systemd |
| socket | .socket | 进程启动,根据其配置,分配系统端口,监听端口状态。如果有请求,维护端口通信(提供网络服) |
| device | .device |
管理硬件设备,驱动程序,设备文件,设备属性 |
| mount | .mount | 管理文件系统的挂载,以及挂载的选项,以及挂载之后的数据管理 |
| automount | .automount | 根据配置,自动的实现设备或者文件系统的挂载 |

以下每段的含义
[Unit]
Description=nginx - high performance web server
Documentation=http://nginx.org/en/docs/
After=network-online.target remote-fs.target nss-lookup.target
#表示支持dns解析以及该软件依赖于网络。
Wants=network-online.target
#先启动网络服务,才能启动nginx
[Service]
Type=forking
PIDFile=/usr/local/nginx/run/nginx.pid
#注意文件位置,如果不对 启动不了
ExecStart=/usr/local/nginx/sbin/nginx -c /usr/local/nginx/conf/nginx.conf
#注意启动文件位置
ExecReload=/bin/kill -s HUP $MAINPID
ExecStop=/bin/kill -s TERM $MAINPID
[Install]
WantedBy=multi-user.target
unit:服务的说明
Description:描述信息
After:依赖,启动的这个进程,systemd会根据after的条件把相关的进程一并启动
Wants:也是一个依赖条件,systemd也会把这个网络功能一并启动
[Service]:服务运行的参数设置
Type=forking:后台运行
ExecStart=/usr/local/nginx/sbin/nginx -c /usr/local/nginx/conf/nginx.conf :服务启动时具体运行的命令,#注意启动文件位置
ExecReload=/bin/kill -s HUP $MAINPID:重启的命令
ExecStop=/bin/kill -s TERM $MAINPID:停止进程的命令
[Install]:服务安装的相关设置,以及运行的模式
WantedBy=multi-user.target:支持多用户模式
系统的运行级别
| 运行级别 | systemd对应的targe | 说明 |
| 0 | target | 关机 |
| 1 | rescue.target | 单用户模式,系统维护时使用 |
| 2 | multi-user.target | 字符模式,和3一样 |
| 3 | multi-user.target | 字符模式,完整的字符模式,3模式可以支持多用户,工作上遇到的都是3 |
| 4 | multi-user.target | 字符模式,和3一样 |
| 5 | graphical.target | 图形化多用户模式 |
| 6 | reboot.target | 重启 |
查看系统的运行级别:runlevel
切换系统的运行级别:init 0 1 2 3 4 5 6
如何对服务进程进行控制:
systemctl +控制类型 +服务名称(进程)
控制类型:start :启动
stop :停止
restart :重启(先停止再开启,修改服务的配置文件,必须要重启服务才能生效)
reload:重新加载单元配置
status:查看服务的状态
running:正常运行
dead:服务停止
fail :启动失败,查找失败的原因
exit-code真正的启动失败
Resuil:signal:表明有人强制终止了该进程,不一定是报错

















 805
805

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









