




 本文详细介绍如何使用WinDbg进行ACPI/ASL代码级调试。从调试环境搭建到实际案例操作,涵盖配置Debugger与Debuggee、安装Symbol File及CheckedAcpi.sys等步骤,并通过实例展示ACPI调试技巧。
本文详细介绍如何使用WinDbg进行ACPI/ASL代码级调试。从调试环境搭建到实际案例操作,涵盖配置Debugger与Debuggee、安装Symbol File及CheckedAcpi.sys等步骤,并通过实例展示ACPI调试技巧。
http://blog.youkuaiyun.com/hgf1011/archive/2009/02/12/3881848.aspx
Tracking ACPI/ASL Using WinDbg
1. Preface
ACPI是BIOS和OS之间沟通的主要手段,所以有些系统相关的问题,都跟ACPI asl code有很大的关系,如果能够直Debug ACPI asl code那将会对解决这类问题提供很好的帮助。这篇文章的目的就是讲解如何使用WinDbg实现ACPI/ASL code源码级别的调试。
2. Configuration of Debugger & Debuggee
Debug ACPI 最好是双机调试,一台主机Debugger和一台目标机器Debuggee。WinDbg支援COM,1394,USB2.0三种不同的连接方式。它们的配置方法都大同小异,我使用的1394,所以我将介绍1394的配置方式。
a) 设置Debuggee为调试模式
启动Debuggee进入OS,点击开始菜单选择运行,然后输入msconfig然后选择BOOT.INIèAdvanced Optionsè/DEBUG剩下的具体方式如下图1所示,其中/CHANEL选择可以随便指定,但是要和Debugger端设置的要一致。

图1
b) 安装设置WinDbg
WinDbg是微软提供的免费的Debug工具(微软还是不错的J),它非常强大,可以调试各种程序包括ACPI,Driver,AP而且它甚至可以用于Windows OS Kernel Debug,据说微软自己也使用 该程式辅助开发他们的OS, WinDbg在微软网站上有免费下载。如果你在别的机器上已经安装好了WinDbg,那么可以直接copy过来就能使用了。
c) 安装Symbol File
什么是symbol文件呢?Symbol文件包含了被调试程序的变量名称,函数名,入口地址以及代码行号等信息。通常以pdb为扩展名。为了能调试debuggee,debugger端使用的Symbol文件一定要和目标机上安装的操作系统的版本要一致。Symbol文件对于WinDbg来说是至关重要的,如果找不到正确的Symbol文件,调试功能就没法使用。安装完Symbol以后Ctrl + S 设置WinDbg Symbol路径例如:SRV*C:/Symbols*C:/WINNT/Symbols*http://msdl.microsoft.com/download/symbols。最好把微软的Symbols 服务器也写上这样比较保险。Windows的Symbol文件可以在微软网站上免费下载。
d) 安装Checked Acpi.sys
BIOS中的ASL code通过asl.exe这个程序转化为aml文件,进入OS以后,OS通过两个inbox的driver Acpi.sys Smbios.sys解释和执行aml code。而且微软还提供了一个调试工具专门用于调试aml code,它就是Microsoft AMLI Debugger。这个Debugger需要两部分配合才能工作,一部分内建于WinDbg,另一部分则需要Checked Acpi.sys。所以如果要调试ACPI asl code,就必须要安装checked Acpi.sys和Symbol文件一样Checked Acpi.sys一定要和目标机安装的操作系统版本要一致。替换debuggee的system32/drivers下的 Acpi.sys,一定要进入安全模式,如果不仅安全模式你会很惨哦J。
e) Start Kernel Debug
打开WinDbg选择FileèKernel Debugè1394(channel 1)èOK
如下图2所示:
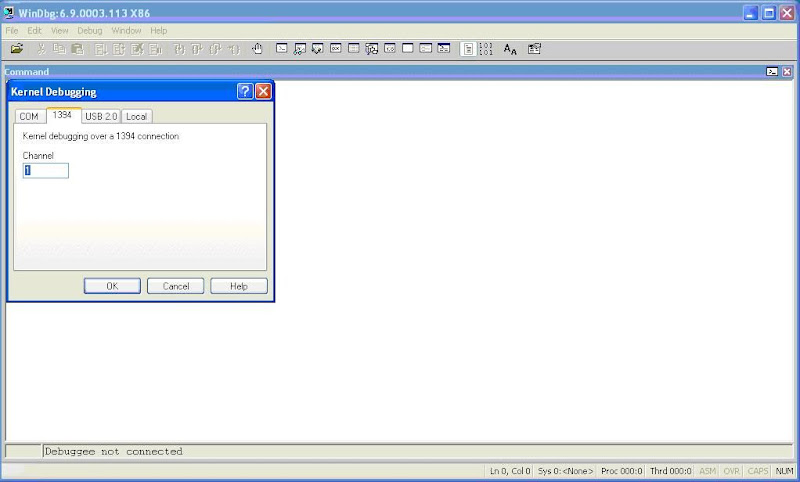
图2
接下来的动作就是Ctrl+Break,断下Debuggee的OS,然后就会出现如下图3所示的界面,这时就可以开始下断点,跟踪程式,查看程式的上下文,查看寄存器的值等等。想干嘛,随你的便J!
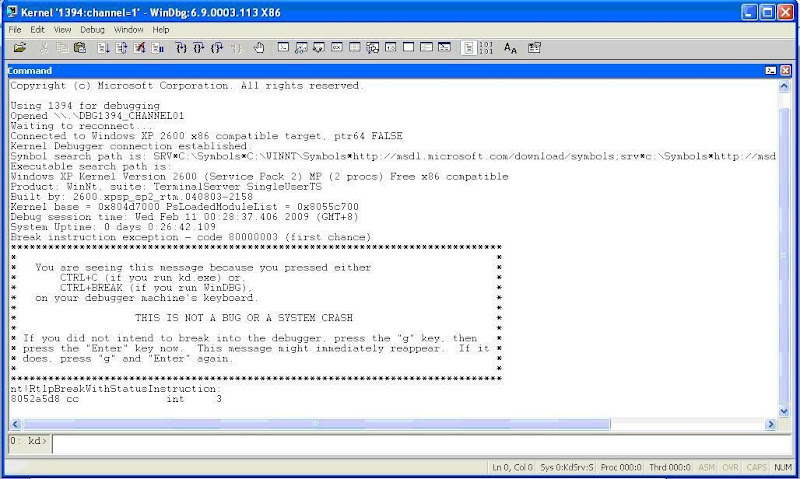
图3
3. Let’s Begin Fighting It
空谈误国,实战兴邦。罗嗦了这么多废话,现在要开始行动了。首先我们要先输入!amli debugger 启动amli调试器,第一次可能会失败,报下述错误:AMLI_DBGERR: failed to get debugger flag address。这个错误的原因可能是:
1. Checked Acpi.sys和Acpi.pdb文件和debuggee版本不符导致的。
2. WinDbg没有load Acpi符号文件,只要.reload即可。
下面我将给出几个小的sample,演示如何debug asl code。
a) Dump Acpi namespace device objects
输入!amli dns /s /_sb.pci0.sbrg.ec 在我的调试环境下将会出现下述内如图4所示,/_sb.pci0.sbrg.ec这是Acpi device Object 路径,每个bios的实现可能不同,这里是我的debuggee下EC这个device的路径。嘿嘿…怎么样,EC的秘密一览无余了吧。
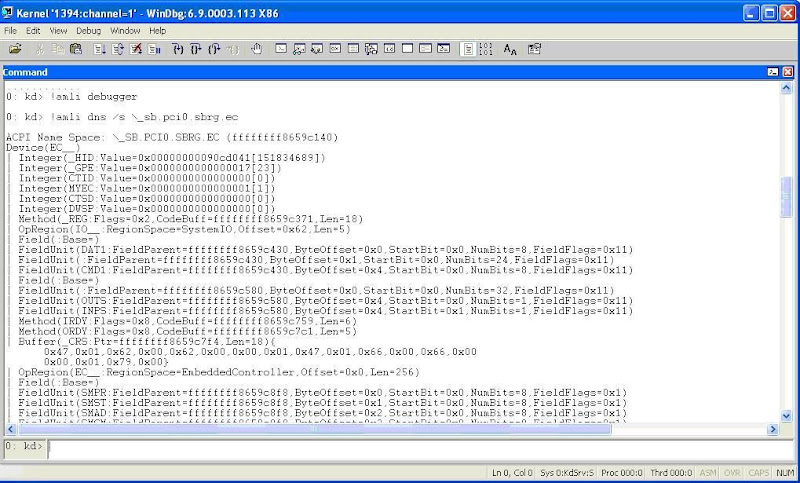
图4
b) Set breakpoints in Acpi method
输入!amli debugger ègo,然后一旦aml被解释WinDbg就会被断下,这时我们再输入!amli bp/_sb.pci0.sbrg.ec.bat1. _staègo这时我们就在battery _sta这个method下了个断点,一旦该method被call,那么我们就会hit the breakpoint。那么该方法什么时候会被call呢?Acpi spec有如下描述:

图5
也就是说一旦有device插拔动作该method就会被call,那么我们拔掉battery试试看会怎么样呢?下图6给出了答案,我们的断点被hit了。
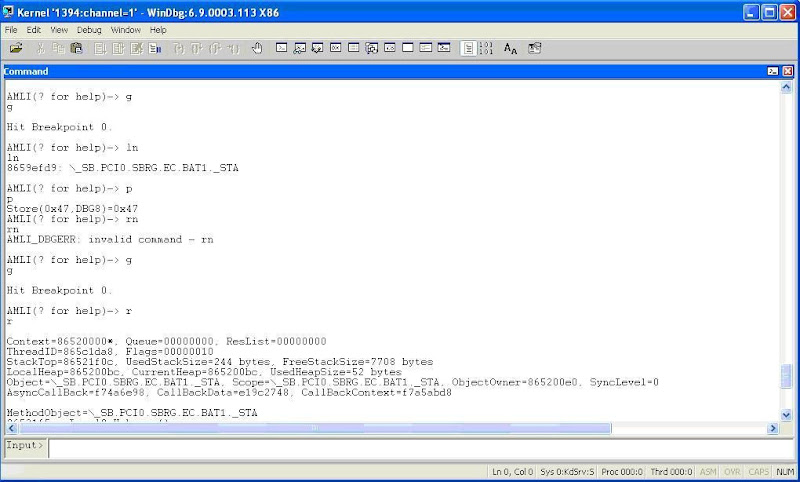
图6
被断下以后我们可以在WinDbg查看各种信息,例如使用r检查上下文信息,ln列出breakpoints最近的method,p单步查看各个参数的值等等,help yourself!J
c) Tracking processes of S3/4/5
我一直不清楚当os下S3/4/5的时候流程是怎样?会执行哪些 asl code而且我们又时不时的会碰到与之相关的问题,烦不胜烦。怎么办呢?Let’s scratch it。输入!amli debugger ègo,下来输入 set verboseon èset traceonègo,然后我们选择让debuggee 关机进入S5,WinDbg将会出现下图7类似的输出。这些就是下S5 Acpi asl code的完整process。我们发现OS先会去获得一些AC,BAT,LID等设备的信息,然后会call /_PTS(0x5) method 0x5就表示S5。S5追过了,S3/S4那就如法炮制。
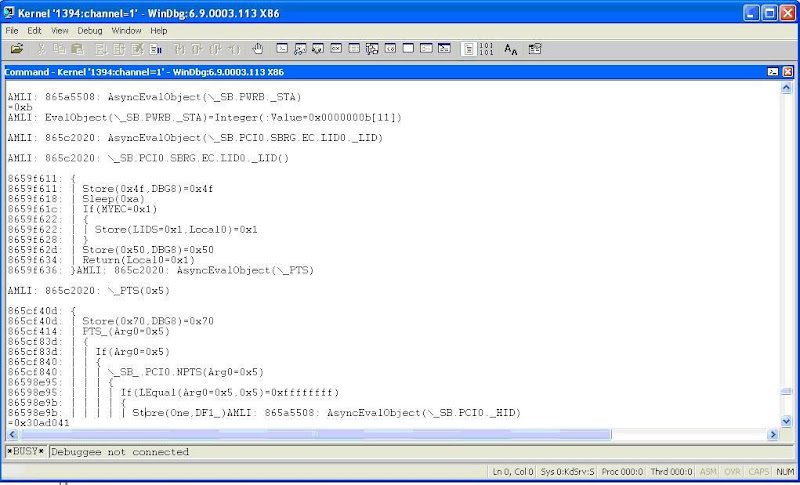
图7
REFF:

















 626
626




 到【灌水乐园】发言
到【灌水乐园】发言








{kind=link}